

4.3 Настройка пид - регулятора
Для настройки ПИД регулятора – определения значений пропорционального, дифференциального и интегрального коэффициентов – воспользуемся встроенными средствами среды Simulink.
Подбор коэффициентов будем осуществлять с помощью блока NCD OutPort. Включим его в схему, как показано на рисунке 10.
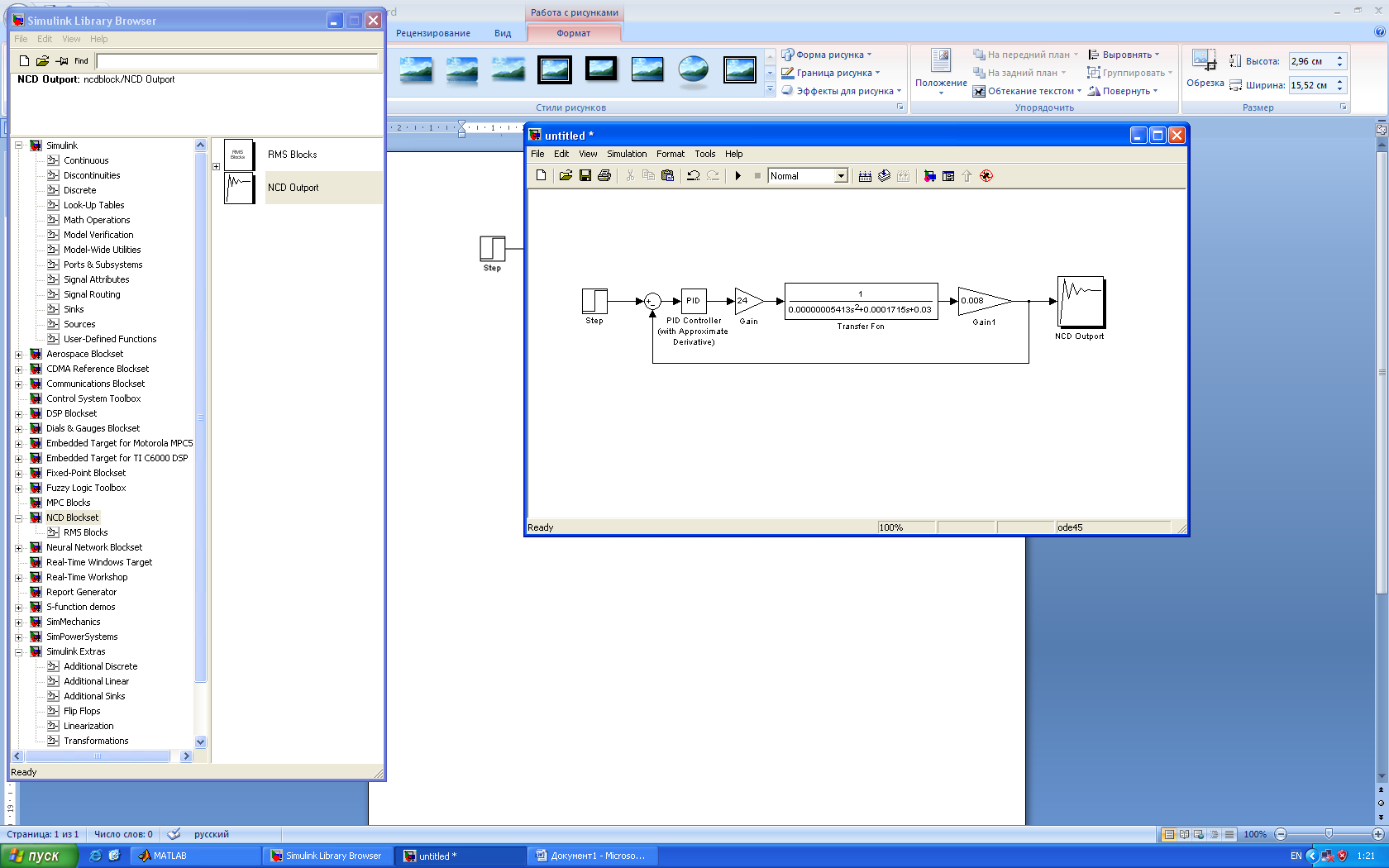
Рис. 10 Схема, собранная для настройки ПИД регулятора
Зададим настройки блока NCD OutPort (рис. 11, 12) и ПИД регулятора PID Controller (рис. 13).
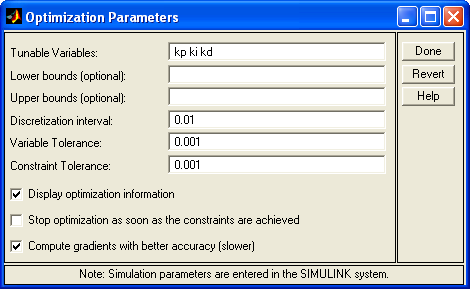
Рис. 11 Настройки блока NCD OutPort
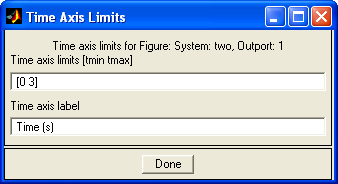
Рис. 12 Настройки блока NCD OutPort
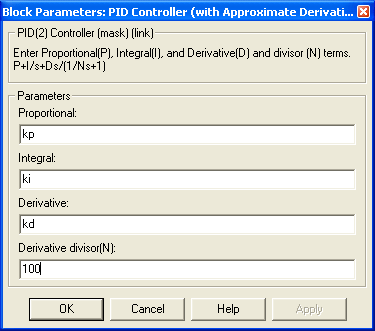
Рис. 13 Параметры ПИД регулятора PID Controller
В блоке NCD OutPort зададим ограничения для графика переходного процесса (рис. 14).
Блок NCD OutPort производит автоматическую коррекцию параметров Kp, Ki и Kd.
Рис. 14 Настройка границ в блоке NCD OutPort
Значения коэффициентов, полученных оптимизацией в блоке NCD OutPort:
Kp = 0.99
Ki = 2.96
Kd = 0
После корректировки переходная функция удовлетворяет техническому заданию (рис. 15).
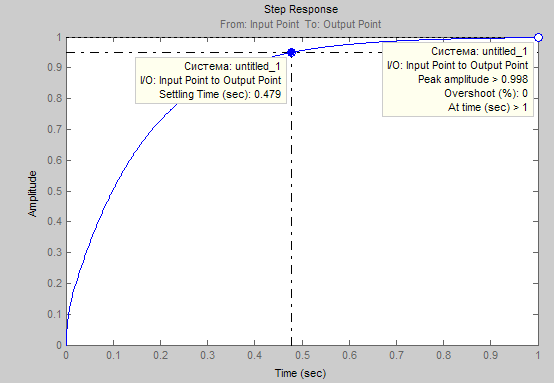
Рис. 15 Реакция системы на единичное ступенчатое воздействие
Получены следующие характеристики:
1) Время переходного процесса – 0.479 с.
2) Установившееся значение – 1 с-1. зачем это нужно?
3) Количество колебаний – 0.
4) Коэффициент перерегулирования – 0.
5) Статическая ошибка –0.
4.4 Определение передаточных функций разомкнутой и замкнутой системы.
Определим передаточную функцию разомкнутой системы:
Wраз = Wус (p) ∙ Wдвигателя (p) ∙ Wредуктора (p) ∙ WПИД-регулятора (p)

Определим передаточную функцию замкнутой системы:
![]()


Х![]() арактеристическое
уравнение замкнутой системы имеет вид:
арактеристическое
уравнение замкнутой системы имеет вид:
![]() =
0
=
0
![]() =
0
=
0
исследование качественных характеристик САУ (Найквист, Боде)
нелинейность
5 ЦСАУ
Необходимо разработать ЦСАУ ногой прыгающего робота, осуществить выбор электронных компонентов, разработать алгоритм работы системы
5.1 Система управления роботом.
В общем случае структурная схема замкнутой трехканальной системы управления роботом имеет вид, приведенный на рис. 4.
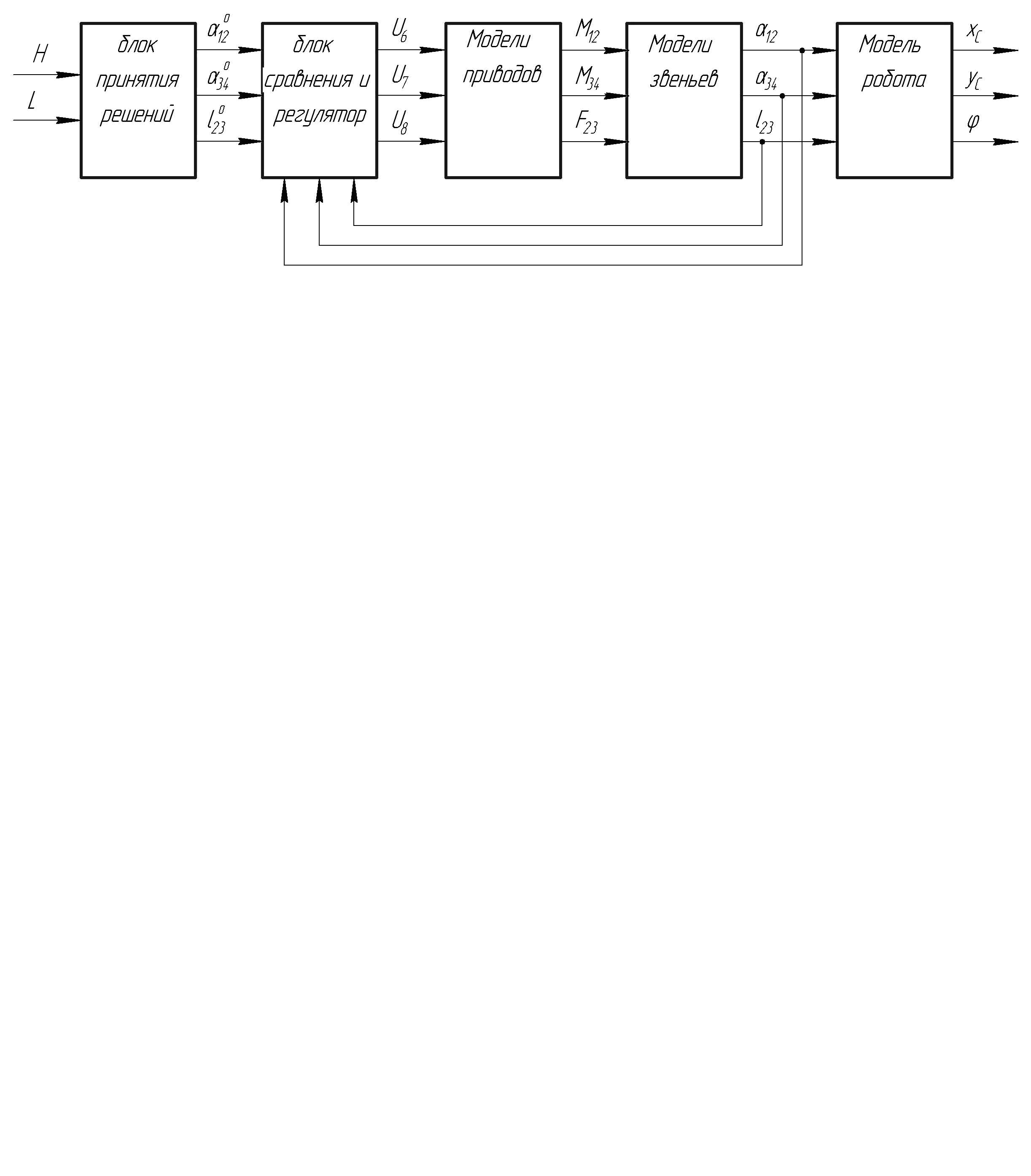
Рис. 4. Структурная схема системы управления прыгающим роботом
углы, длину, моменты и силу в соответствии с используемыми обозначениями
Программное управление устройством
осуществляется только в фазе разгона,
исходя из значений высоты Н и длины
L препятствия, которое
объекту необходимо преодолеть. Указанная
информация поступает в блок принятия
решений, в котором определяются задающие
воздействия в виде углов
![]() и
и
![]() поворота звеньев 1 и 2, 3 и 4 друг относительно
друга и расстояние
поворота звеньев 1 и 2, 3 и 4 друг относительно
друга и расстояние
![]() ,
на которое звено 3 перемещается
относительно 2. В основе расчета задающих
воздействий лежит решение задачи о
высоте и расстоянии, пройденных телом,
брошенным под углом к горизонту.
Дополнительно к рассчитанным параметрам
вводится некоторый коэффициент запаса,
учитывающий влияние окружающей среды,
в том числе неровностей и свойств
поверхности, с которой осуществляется
прыжок робота, метеоусловий и т.д.
Задающие воздействия сравниваются с
фактическими значениями данных параметров
,
на которое звено 3 перемещается
относительно 2. В основе расчета задающих
воздействий лежит решение задачи о
высоте и расстоянии, пройденных телом,
брошенным под углом к горизонту.
Дополнительно к рассчитанным параметрам
вводится некоторый коэффициент запаса,
учитывающий влияние окружающей среды,
в том числе неровностей и свойств
поверхности, с которой осуществляется
прыжок робота, метеоусловий и т.д.
Задающие воздействия сравниваются с
фактическими значениями данных параметров
![]() ,
,
![]() ,
,
![]() .
На основании результатов сравнения
регулятор в соответствии с принятой
стратегией управления по ошибке формирует
управляющие напряжения U6,
U7, U8,
подаваемые на приводы. Полученные
моменты M12, M34
и сила F23
обеспечивают поворот и перемещение
соответствующих звеньев на углы α12
и α34 и на расстояние l23,
что в свою очередь приводит к изменению
значений обобщенных координат робота
хС, уС и φ.
.
На основании результатов сравнения
регулятор в соответствии с принятой
стратегией управления по ошибке формирует
управляющие напряжения U6,
U7, U8,
подаваемые на приводы. Полученные
моменты M12, M34
и сила F23
обеспечивают поворот и перемещение
соответствующих звеньев на углы α12
и α34 и на расстояние l23,
что в свою очередь приводит к изменению
значений обобщенных координат робота
хС, уС и φ.