

1.3 Прыгающие роботы, отличающиеся видом механизма позиционирования после прыжка
Классифицируем механизмы, позволяющие роботу занять вертикальное положение, по трем принципам (рисунок 1.). Первый принцип (А) заключается в использовании рук или рычагов, перемещающихся после приземления до достижения вертикального положения (minimalist jumping robot). Этот принцип обладает преимуществом при перевороте как на гладких поверхностях, так и на шероховатых, где переворот может быть затруднен. По сравнению с другими решениями, это достаточно эффективно. Его недостаток заключается в том, что необходимы дополнительные приводы и определенное количество энергии для того, чтобы конструкция могла подняться и совершить движение. Дополнительные приводы усложняют конструкцию и потенциально понижают ее надежность.
Второй принцип заключается в перемещении внутренней массы, которая создает крутящий момент и переворачивает систему (Jollbot). Это достаточно простое и эффективное решение, но недостаток заключается в том, что после приземления робот вначале занимает устойчивое положение в перевернутом состоянии, и только после этого привод перемещает внутреннюю массу. Существует вероятность, что робот может застрять в том случае, если ландшафт не достаточно гладкий и крутящий момент, создаваемый перемещением внутренней массы, недостаточен, чтобы преодолеть препятствие.
Третий принцип представляет собой пассивный механизм, в котором центр масс системы расположен в нижней части конструкции и создает крутящий момент, позволяющий роботу перевернуться. По сравнению со вторым принципом это более эффективное решение, т.к. во время приземления существует тенденция стать в вертикальном положении. Т.к. для реализации этого принципа не требуется приводов и подвижных элементов, это является очень простым и энергетически эффективным решением. Поэтому мы выбираем этот принцип для переворота нашего робота.
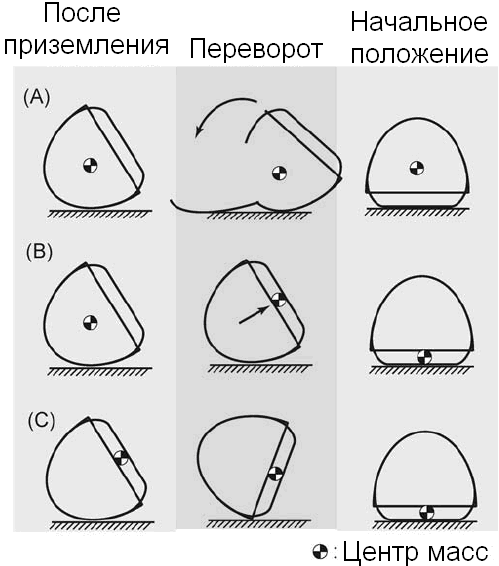
Рис. 2 Механизмы переворота робота после прыжка: (А) - изменение конструкции робота; (В) - изменение положения центра масс; (С) - расположение центра масс в нижней части конструкции

Jollbot (2007), 465-граммовый робот, может активно сжимать сферическую конструкцию, чтобы занять вертикальное положение после приземления. Может изменять направление прыжка за счет поворота своего центра масс вокруг главной оси.
1.4 Технико-экономическое обоснование
В данном проекте предложена конструкция мобильного вибрационного робота, передвигающегося за счет силы инерции, возникающей при периодическом движении сердечника электромагнита соленоидного типа. Применение такого виброробота возможно в экстремальных условиях (повышенная температура или высокий радиационный фон), а также в труднодоступных для человека местах (трубы, вентиляционные шахты и т.п.), например, для мониторинга. Робот может перемещаться там, где передвижение колесных или гусеничных устройств невозможно или очень затруднено (сыпучий грунт, вязкие среды и т.п.) Также к преимуществам разрабатываемого виброробота следует отнести его небольшие размеры, простоту конструкции и системы управления, низкое энергопотребление и невысокую себестоимость. Это говорит о том, что данный проект актуален.