

5.2 Функциональная схема цсау
Функциональная схема системы управления ногой прыгающего робота приведена на рисунке 5.1. Она включает в себя следующие компоненты:
Система работает следующим образом. С пульта дистанционного управления поступает сигнал на радио-модуль какая информация в сигнале, что происходит, если все звенья ноги выставлены на необходимый угол, то происходит вращение привода кулачка и, соответственно, прыжок.
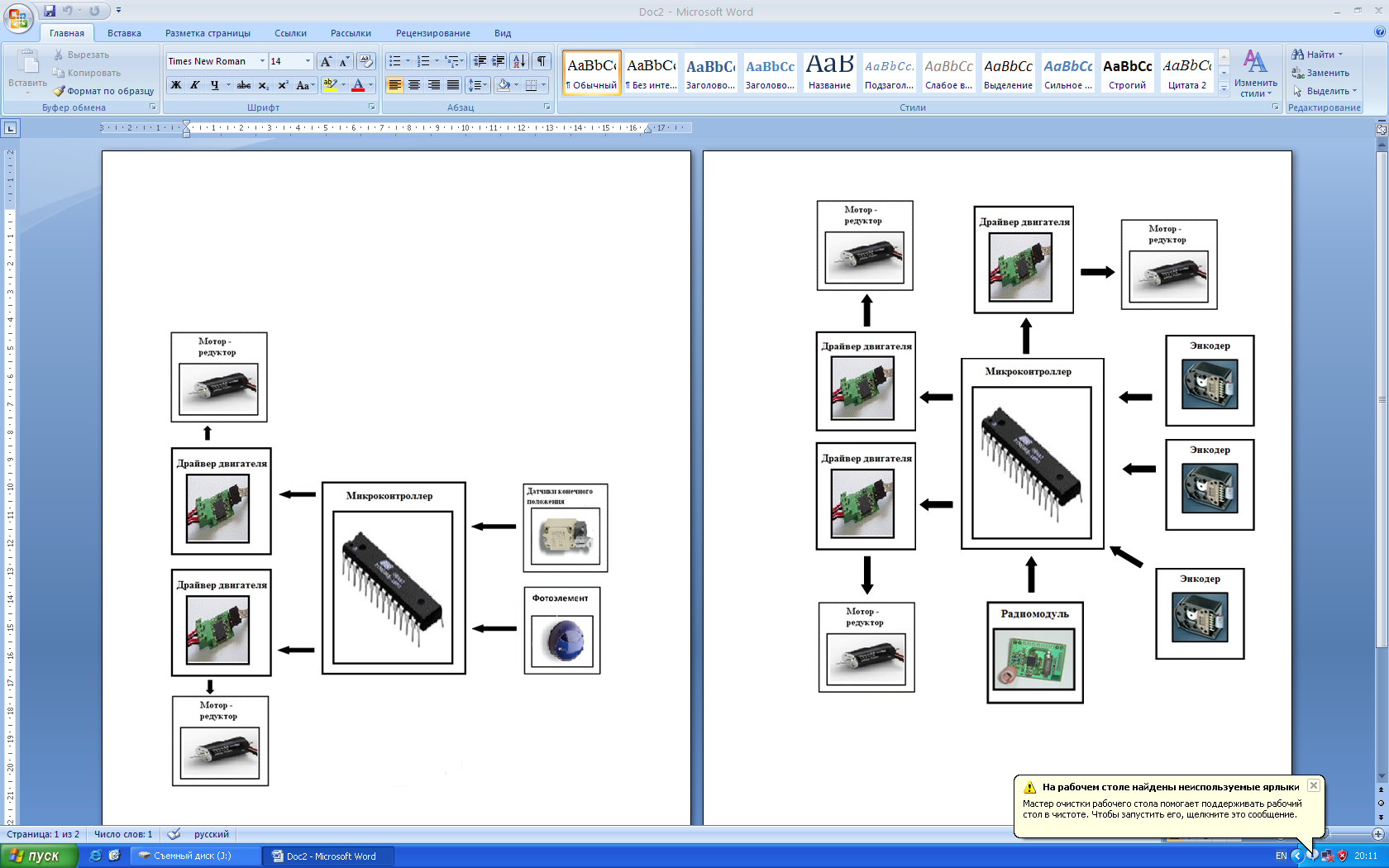
Рис.4 Функциональная схема системы
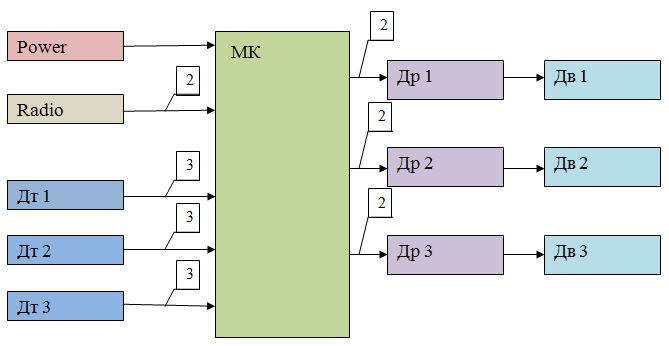
Рис.5 Представление функциональной схемы в виде блок-схемы
На функциональной схеме (рис.5) приняты следующие обозначения:
POWER – выключатель питания установки;
МК – микроконтроллер, включающий АЦП и ШИМ на кристалле. Микроконтроллер обеспечивает реализацию необходимых законов управления приводами, а также управляет индикацией и обрабатывает информацию, поступающую с датчиков.
Дт 1, Дт 2, Дт 3 – энкодеры. После включения установки на них подается питание, и данные с этих датчиков попадают на входы АЦП микроконтроллера.
Radio – радиомодуль. После включения установки он принимает данные с пульта дистанционного управления и передает их на микроконтроллер.
Др 1, Др 2, Др 3 – драйверы двигателей, осуществляют силовую развязку цифровой системы управления и электродвигателя.
Дв 1, Дв 2, Дв 3 – электродвигатели постоянного тока.
5.3 Структурная схема устройства
На рис.6 приведена структурная схема системы автоматического управления одним из приводов:
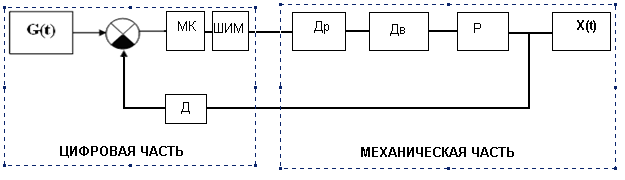
Рис. 6 Структурная схема управления приводом вертикального вращения, где
G(t) – задающее воздействие (напряжение);
X(t) – поворот створки ворот на заданный угол;
МК – микроконтроллер;
Д – датчик (энкодер);
Др – драйвер двигателя;
Дв – двигатель постоянного тока;
Р – редуктор
вот эту схему немного переделать и в раздел ТАУ
5.4 Выбор электронных компонентов
Рассматривая функциональную схему устройства (рис. 4), можно сделать вывод о количестве необходимых компонентов для реализации цифровой САУ.
Представим список необходимых компонентов:
1) микроконтроллер;
2) драйверы двигателей;
3) энкодеры;
4) Модуль беспроводной передачи данных
5.4.1 Микроконтроллер
Для проектируемой ЦСАУ рационально использовать небольшой по размерам, не требующий для своей работы дополнительных микросхем окружения недорогой микропроцессор, обладающий в то же время достаточными возможностями для решения поставленной задачи.
В качестве микроконтроллера для этой ЦСАУ был выбран микроконтроллер Atmega16 (PDIP) производителя Atmel. Это экономичный 8-битовый КМОП микроконтроллер, построенный с использованием расширенной RISC архитектуры AVR. Исполняя по одной команде за период тактовой частоты, Atmega16 (рис. 20) имеет производительность около 16 MIPS на 16 МГц, что позволяет разработчикам создавать системы, оптимальные по скорости и потребляемой мощности.
Рис. 20 Микроконтроллер ATmega16 компании Atmel
В основе ядра AVR лежит расширенная RISC архитектура, объединяющая развитый набор команд и 32 регистра общего назначения. Все 32 регистра непосредственно подключены к арифметико-логическому устройству (АЛУ), что дает доступ к любым двум регистрам за один машинный цикл. Подобная архитектура обеспечивает десятикратный выигрыш в эффективности кода по сравнению с традиционными CISC микроконтроллерами. Atmega16 предлагает следующие возможности:
16 кБ загружаемой флэш-памяти;
512 байт EEPROM;
32 линий ввода/вывода общего назначения;
32*8 рабочих регистра;
настраиваемые таймеры/счетчики с режимом совпадения;
внешние и внутренние прерывания;
программируемый универсальный последовательный порт;
встроенный генератор,
трехканальный ШИМ,
встроенный аналоговый компаратор,
8 – канальный 10 – битный АЦП,
сторожевой таймер.
Atmega16 является мощным микроконтроллером, который позволяет создавать достаточно гибкие и эффективные по стоимости устройства. Микроконтроллер питается постоянным напряжением 4.5-5.5В, рабочая частота 0-16 МГц.
Распиновка микроконтроллера представлена на рис. 21
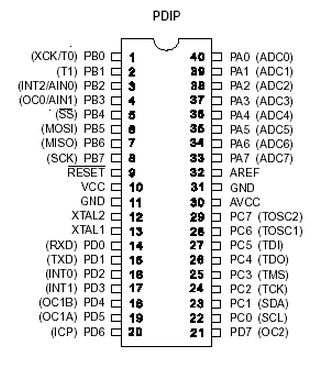
Рис. 21 Распиновка микроконтроллера Atmega16
Ниже приведено описание выводов микроконтроллера Atmega16.
VCC - вывод источника питания
GND – земля
Port A (PA7..PA0) - Порт A – 8-разр. порт двунаправленного ввода-вывода с внутренними подтягивающими к плюсу резисторами (выбираются раздельно для каждого разряда). Выходные буферы порта A имеют симметричную выходную характеристику с одинаковыми втекающим и вытекающим токами. При вводе, линии порта А будут действовать как источник тока, если внешне действует низкий уровень и включены подтягивающие резисторы.
Port В (PВ7..PВ0) - Порт B – 8-разр. порт двунаправленного ввода-вывода с внутренними подтягивающими к плюсу резисторами (выбираются раздельно для каждого разряда). Выходные буферы порта В имеют симметричную выходную характеристику с одинаковыми втекающим и вытекающим токами. При вводе, линии порта B будут действовать как источник тока, если внешне действует низкий уровень и включены подтягивающие резисторы. Выводы порта B находятся в третьем (высокоимпедансном) состоянии при выполнении условия сброса, даже если синхронизация не запущена.
Port C (PC7..PC0) - Порт C – 8-разр. порт двунаправленного ввода-вывода с внутренними подтягивающими к плюсу резисторами (выбираются раздельно для каждого разряда). Выходные буферы порта C имеют симметричную выходную характеристику с одинаковыми втекающим и вытекающим токами. При вводе, линии порта C будут действовать как источник тока, если внешне действует низкий уровень и включены подтягивающие резисторы. Выводы порта C находятся в третьем (высокоимпедансном) состоянии при выполнении условия сброса, даже если синхронизация не запущена.
Port D (PD7..PD0) Порт D – 8-разр. порт двунаправленного ввода-вывода с внутренними подтягивающими к плюсу резисторами (выбираются раздельно для каждого разряда). Выходные буферы порта D имеют симметричную выходную характеристику с одинаковыми втекающим и вытекающим токами. При вводе, линии порта D будут действовать как источник тока, если внешне действует низкий уровень и включены подтягивающие резисторы. Выводы порта D находятся в третьем (высокоимпедансном) состоянии при выполнении условия сброса, даже если синхронизация не запущена.
RESET - Вход сброса. Удержание на входе низкого уровня в течение двух машинных циклов (если работает тактовый генератор), сбрасывает устройство.
XTAL1 - Вход инвертирующего усилителя генератора и вход внешнего тактового сигнала.
XTAL2 - Выход инвертирующего усилителя генератора.
AVCC – питание аналоговых частей микроконтроллера.
AREF – вход подключения источника опорного напряжения АЦП.