

2.3 Модель взаимодействия робота с опорной поверхностью
Положим, что в точке А корпуса робота при взаимодействии с поверхностью возникает сила сухого кулонова трения, описываемая следующей формулой (рисунок 2.3):
![]()
![]()
где F0 – равнодействующая всех сил, кроме силы сухого трения, приложенных к конструкции робота;
f – коэффициент трения скольжения;
NА- нормальная реакция в точке А;
![]() -
скорость точки А
вдоль оси Ох.
-
скорость точки А
вдоль оси Ох.
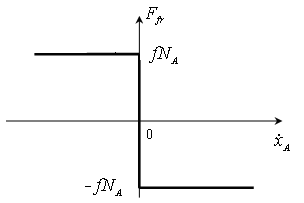
Рисунок 2.3 Модель сухого кулонова трения
При
движении робота будут возникать сила
R
и момент
![]() вязкого трения, приложенные к центру
масс корпуса. Сила R
может быть представлена в виде проекций
на оси относительной системы координат:
вязкого трения, приложенные к центру
масс корпуса. Сила R
может быть представлена в виде проекций
на оси относительной системы координат:
![]() ,
,
где
![]() и
и
![]() - коэффициенты вязкости вдоль осей Сх1
и Су1
соответственно,
- коэффициенты вязкости вдоль осей Сх1
и Су1
соответственно,
![]() ,
,
![]() - проекции скорости центра масс корпуса
на оси относительной системы координат,
определяемые следующим образом:
- проекции скорости центра масс корпуса
на оси относительной системы координат,
определяемые следующим образом:
![]() ,
,
![]() .
.
С учетом полученных выражений проекции силы вязкого сопротивления примут вид:
![]() ,
,
![]() .
.
Момент вязкого сопротивления будем вычислять по формуле:
![]() ,
,
где
![]() - коэффициент вязкого сопротивления
при повороте корпуса робота.
- коэффициент вязкого сопротивления
при повороте корпуса робота.
2.4 Уравнения движения прыгающего робота
Рассмотрим все возможные варианты движения робота во время реализации им одного прыжка. используемый метод
2.4.1 Статическое положение при двух точках опоры
Этот
режим наблюдается, когда робот контактирует
с поверхностью в двух опорных точках
(NA>0,
NB>0)
и сила трения, возникающая в точке А,
не превышает предельную (![]() )
(рисунок 2.4).
)
(рисунок 2.4).
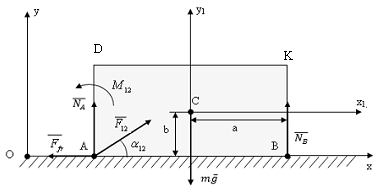
Рисунок 2.4 Расчетная схема устройства в статике при двух опорных точках
Система уравнений
![]() (1)
(1)
описывающих состояние робота, требует решения относительно двух нормальных реакций NA и NB и силы трения Ffr.
![]() .
.
Нормальные реакции в точках А и В равны:
![]() ,
,
![]() .
.
2.4.2 Статическое положение при одной точке опоры
Рассмотрим
статическое положение робота, когда
нормальная реакция в точке А
положительна (NA>0,
), нормальная реакция в точке В
равна 0 (NB=0)
и сила трения в точке А
не превышает предельную (![]() )
При этом
)
При этом
![]() ,
,
![]() ,
,
![]() (рисунок 2.5).
(рисунок 2.5).
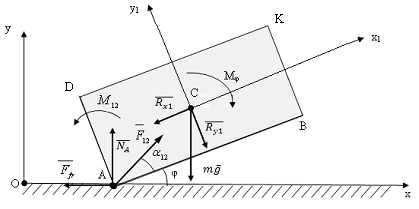
Рисунок 2.5 Расчетная схема робота в статике при одной точке опоры
Система уравнений записывается следующим образом:
![]() (2)
(2)
Неизвестными являются нормальная реакция NA и сила трения Ffr в точке А, которые находятся по формулам:
![]() ,
,
![]() .
.
Условие статического положения робота при одной точке опоры определяется третьим уравнением системы:
![]() .
.
2.4.3 Прямолинейное движение робота с двумя точками опоры по шероховатой поверхности
В
этом режиме две опорные точки находятся
на поверхности (нормальные реакции в
них больше нуля NA>0,
NB>0)
и сила трения равна предельной (![]() ).
).

Рис. 6.3 Расчетная схема робота с двумя точками опоры при прямолинейном движении
На систему наложены связи: уС=b, φ=0.
Запишем систему дифференциальных уравнений, описывающих движение робота
![]() (3)
(3)
и решим ее относительно двух нормальных реакций и линейного ускорения вдоль оси Ох:
![]() ,
,
![]() .
.
Выражение для ускорения точки С имеет вид
![]()