

5.6 Алгоритмы управления
С учетом всех аппаратных особенностей проектируемой цифровой системы автоматического управления, напишем алгоритм функционирования управляющей программы для нее (рис. 32).
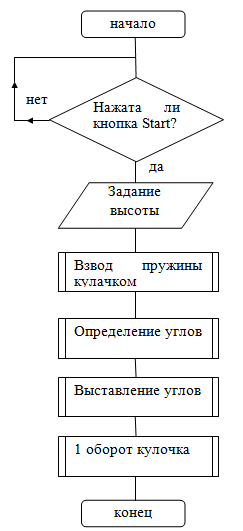
Рис. 32 Алгоритм функционирования управляющей программы кулачка
Для прыжка необходимо при помощи пульта задать требуемую высоту прыжка, которая через радиомодуль попадет в микроконтроллер. Далее происходит взвод кулачка. После этого будет произведен расчет углов между звеньями ноги робота. Далее будет проведена проверка, соответствуют ли полученные углы установленным, если не соответствуют, то производится их выставление на требуемое значение. После чего производится 1 оборот кулачка и, соответственно, происходит прыжок.
5.7. Исследование цифровой сау
5.7.1 Моделирование цифровой системы
Для исследования ЦСАУ необходимо провести z-преобразование передаточной функции непрерывной системы. Для этого воспользуемся средствами математического пакета VisSim (рис. 16).
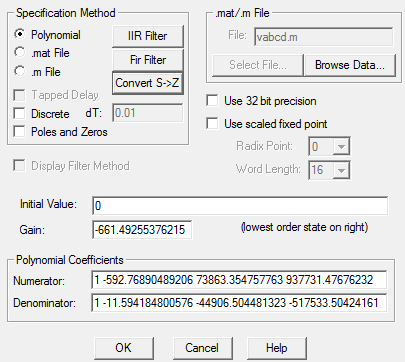
Рис. 16 Переход в Z-пространство средствами VisSim
Смоделируем схему цифровой системы автоматического управления в Simulink (рис. 17).
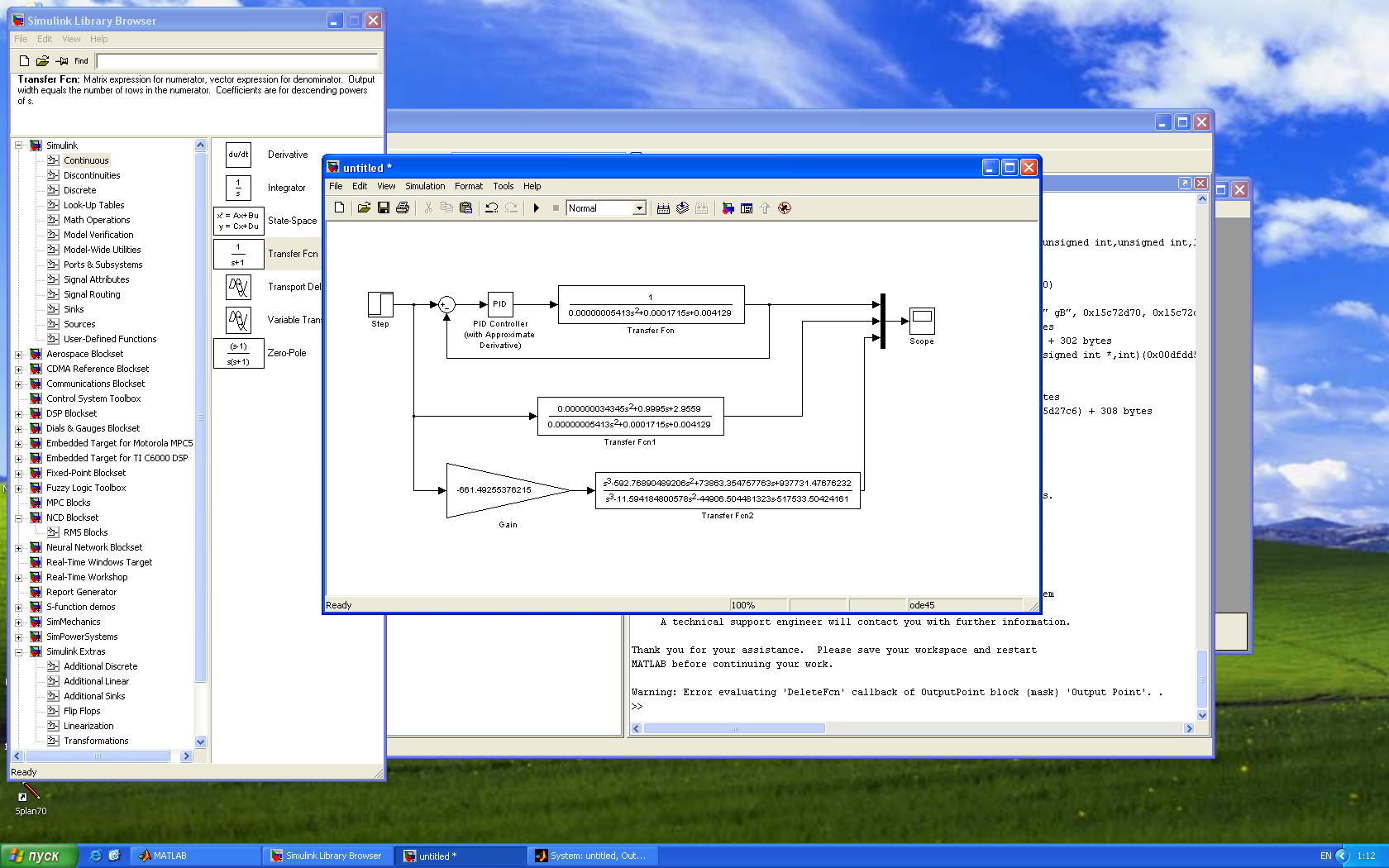
Рис.17 Структурная схема ЦСАУ

Рис. 18 Отработка ЦСАУ заданного закона подписать графики
5.7.2 Исследование цифровой системы на устойчивость
Как
известно, непрерывная система
устойчива, если все корни ее
характеристического уравнения лежат
в левой полуплоскости. При исследовании
дискретных систем вместо р используется
новая переменная z =![]() .
Конформное преобразование z =
отображает
левую полуплоскость плоскости р в
область, ограниченную окружностью
единичного радиуса на плоскости z, при
этом мнимая ось отражается в саму эту
окружность. Следовательно, для того
чтобы системы была устойчива необходимо
и достаточно, чтобы корни
характеристического уравнения лежали
внутри единичной окружности.
.
Конформное преобразование z =
отображает
левую полуплоскость плоскости р в
область, ограниченную окружностью
единичного радиуса на плоскости z, при
этом мнимая ось отражается в саму эту
окружность. Следовательно, для того
чтобы системы была устойчива необходимо
и достаточно, чтобы корни
характеристического уравнения лежали
внутри единичной окружности.
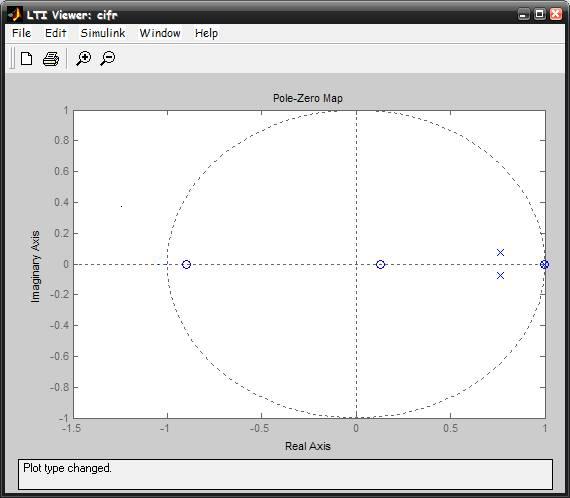
Рис. 19 Проверка устойчивости ЦСАУ
Как видно из рис. 19, все корни характеристического уравнения лежат внутри единичной окружности, следовательно, проектируемая цифровая система устойчива.
Заключение
В данной выпускной квалификационной работе была спроектирована конструкция ноги двуногого прыгающего робота. Для этого был проведен анализ существующих конструкций, выявлены их недостатки, предложена новая конструкция. Был произведен энергетический расчет электроприводов, а также рассчитаны некоторые детали конструкции.
выводы из КУМСа
Нужно указать опубликованные статьи и участие в конференциях
Библиографический список
Подураев, Ю. В. Мехатроника : основы, методы, применение: уч. пос. / Ю. В. Подураев. - М.: Машиностроение, 2006.
Егоров, О. Д. Мехатронные модули. Расчет и конструирование [Текст]: уч.пос. / О. Д. Егоров, Ю. В. - М.: ИЦ МГТУ «СТАНКИН», 2004.
Артоболевский И.И. Механизмы в современной технике. В 5 томах. Том 4. Кулачковые и фрикционные механизмы. Механизмы с гибкими звеньями: пособие для инженеров, конструкторов и изобретателей / И.И. Артоболевский. – М.: Наука. Главная редакция физико-математической литературы, 1975.
литературы 20-25 источников