

Пуск ад
При пуске двигателя S=1 и по мере разгона двигателя S уменьшается и приближается к значению Sкр(≈0,2), S- скольжение.
Ток асинхронного двигателя (статорных обмоток) при пуске превышает своё номинальное значение, так как при вращении ротора в фазных обмотках индуцируется синусоидальное ЭДС сдвинутые относительно фаз питающего напряжения на 180°. Существует 4 вида пуска асинхронных двигателей:
1). Прямой пуск.
2). Реостатный
3). Пуск при понижении напряжении
4). Пуск переключением со звезды на треугольник.
1. Прямой пуск заключается в непосредственном подсоединении обмоток двигателя к трехфазному переменному напряжению. Допускается обычно для двигателей мощностью до 1.5 кВ, при этом кратность пусковых токов как правило не превышает 10.
2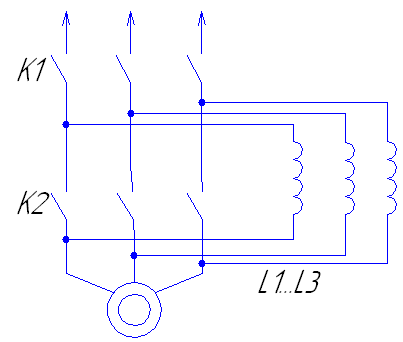 .
При реостатном пуске в фазной обмотке
двигателя вводят дополнительные
индуктивные сопротивления.
.
При реостатном пуске в фазной обмотке
двигателя вводят дополнительные
индуктивные сопротивления.
В начальный момент пуска замыкают K1 и ток протекает через индуктивности L1,L2,L3. Индуктивное сопротивление зависит от частоты. При нарастании тока этих обмоток увеличивается. Достоинство этого способа: - простота реализации;
Недостаток: - при уменьшении тока в K раз , момент двигателя уменьшается в K2 раз.
3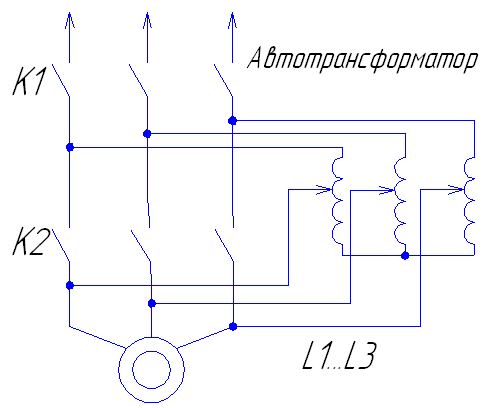 .
Понижение напряжений осуществляют, как
правило, с помощью 3-ех фазного
автотрансформатора (трансформатор с
переменным числом трехфазных обмоток).
.
Понижение напряжений осуществляют, как
правило, с помощью 3-ех фазного
автотрансформатора (трансформатор с
переменным числом трехфазных обмоток).
При пуске замыкают контакты K1 и в фазной обмотке запитывают от автотрансформатора пониженным напряжением. После разгона двигателя замыкают K2. При снижении напряжения в K раз момент двигателя уменьшается тоже в K раз.
Недостаток: - автотрансформатор является достаточно габаритным и дорогостоящим устройством.
4 . Этот способ может быть применен, если рабочие схемы являются треугольник.
В схеме звезда к
статорным обмоткам прикладывается
фазное напряжение, а в схеме треугольник
– линейное напряжение.![]()
Поэтому во время разгона включают схему звезда, а, разогнавшись, включают схему треугольник. Применим только для выводов с внешней коммутации (7 клемм).
Торможение ад
Существует 3 способа торможения асинхронного двигателя:
1. Генераторное торможение возникает, тогда когда частота вращения ротора больше синхронной частоты (частота вращения магнитного поля статора), это может произойти в 2 случаях:
- под действием внешнего момента направленного в ту же сторону, что и момент двигателя;
- при переключении вращающегося двигателя на большее число пар полюсов.
2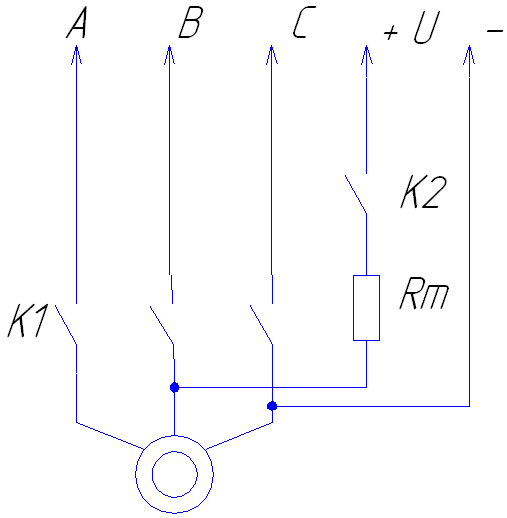 .
При динамическом торможении АД отключают
от трехфазной сети и в 2 или в 3 его фазы
подключают постоянное напряжение. При
этом в магнитной системе двигателя
формируется неподвижное в пространстве
магнитное поле.
.
При динамическом торможении АД отключают
от трехфазной сети и в 2 или в 3 его фазы
подключают постоянное напряжение. При
этом в магнитной системе двигателя
формируется неподвижное в пространстве
магнитное поле.
Во вращающемся по инерции роторе создаются индукционные токи, взаимодействие которых с неподвижным магнитным потоком создает тормозной момент. После остановки двигателя постоянное напряжение надо отключить.
В качестве источника постоянного напряжения обычно используется одна из фаз трехфазного напряжения и выпрямитель. Наличие резистора Rm необходимо для ограничения тока, поскольку сопротивление фазных обмоток на постоянном токе очень мало и этот резистор выполняет функцию тока ограничения.
3 .
При торможении противовключением во
вращающемся по инерции двигателе
изменяют направление вращения магнитного
поля статора. Схема эквивалентна схеме
реверсирования. Если при нулевой частоте
двигатель не отключить от сети, то
двигатель начнет разгоняться в другую
сторону.
.
При торможении противовключением во
вращающемся по инерции двигателе
изменяют направление вращения магнитного
поля статора. Схема эквивалентна схеме
реверсирования. Если при нулевой частоте
двигатель не отключить от сети, то
двигатель начнет разгоняться в другую
сторону.
Самым эффективным способом торможения является протвовключением.
Регулирование частоты вращения АД
Если в формулу
подставить n1
из формулы
![]() и решить относительно n2,
то получим следующие:
и решить относительно n2,
то получим следующие:![]()
Из формулы следует, что существует 3 способа регулирования частоты вращения АД:
За счет изменения частоты питающей сети.
За счет изменения количества пар полюсов.
За счет регулирования скольжения.
Н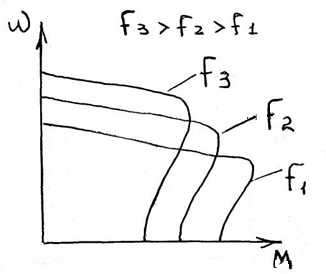 аиболее
широкое применение с сохранением Мкр.
аиболее
широкое применение с сохранением Мкр.
Если увеличивать только частоту питания питающего напряжения, то синхронная частота пропорционально увеличивается, а нагрузочная способность двигателя уменьшается (из-за Мкр). Это происходит потому, что с ростом частоты увеличивается индуктивное сопротивление обмотки, следовательно ток в них падает, следовательно увеличивается магнитный поток и уменьшается момент.
Д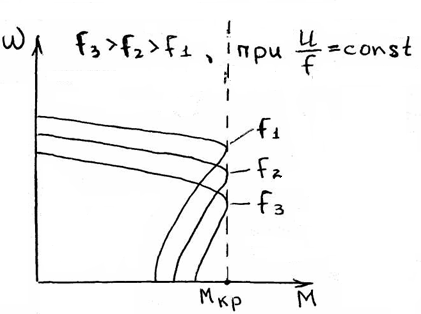 ля
сохранения нагрузочной способности АД
при частотном регулировании пропорционально
частоте регулирования и амплитуде
напряжения.
ля
сохранения нагрузочной способности АД
при частотном регулировании пропорционально
частоте регулирования и амплитуде
напряжения.
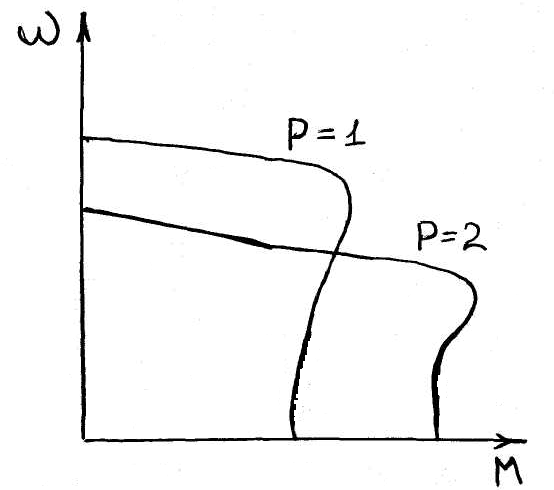
Этот способ может быть применен для двигатели у которых P>1 и у которых существует внешняя коммутация обмоток.
При увеличении числа пар полюсов синхронная частота уменьшается, а момент двигателя увеличивается.
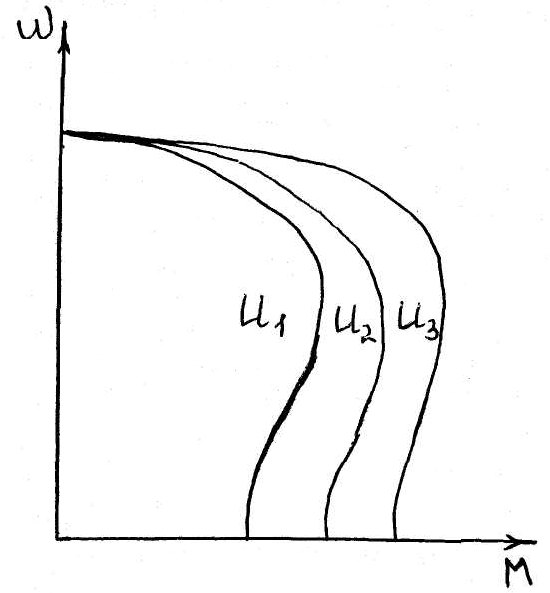
Скольжения можно регулировать за счет амплитуды напряжения. U3>U2>U1.
При изменении амплитуды напряжения синхронная частота не изменяется, а нагрузочная способность двигателя увеличивается (больше магнитное поле).
Наибольшее применяют 1-ый способ( за счет изменения частоты питающей среды).