

Регулирование частоты вращения
Из уравнения
механической характеристики :![]() ,
следует что существует 3 способа
регулирования частоты вращения ДПТ:
,
следует что существует 3 способа
регулирования частоты вращения ДПТ:
За счет изменения приложенного напряжения.
За счет регулирования сопротивления якорной цепи.
За счет изменения магнитного потока возбуждения.
1.
![]()
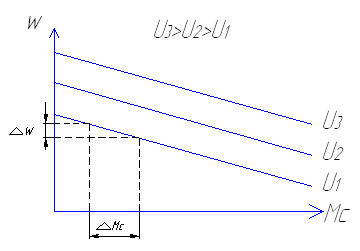
β – жесткость механической характеристики:
∆Mс – изменение момента сопротивления;
∆ω – вызванным этим ∆Mс изменение частоты вращение;
При изменении напряжения якорной цепи частота идеального холостого хода(ω0) пропорционально изменяется, а жесткость β остается неизменной. Это является основным достоинством этого метода, который применяется чаще других.
2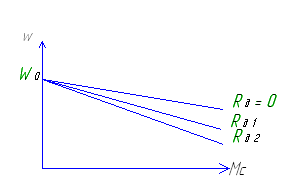 .
Регулировать сопротивление якорной
цепи (Rя)
можно только в сторону увеличения путем
последовательного подключения добавочных
сопротивлений Rдоб.
Если Rдоб=0,
то такую характеристику называют
естественной, все остальные называют
исскуственные.
.
Регулировать сопротивление якорной
цепи (Rя)
можно только в сторону увеличения путем
последовательного подключения добавочных
сопротивлений Rдоб.
Если Rдоб=0,
то такую характеристику называют
естественной, все остальные называют
исскуственные.
Rдоб2> Rдоб1
Вывод: при изменении Rя , ω0 не изменяется, а при увеличении Rдоб жесткость механической характеристики уменьшается.
3 .При
изменении Ф изменяется как ω0,
так и β. В области малых моментов
сопротивления уменьшение магнитного
потока возбуждения приводит к росту
частоты вращения. В области больших
моментов сопротивления, уменьшение Ф
приводит к уменьшению ω. При обрыве
обмотки возбуждения двигателя на
холостом ходу происходит рост частоты
вращения, двигатель идет в разнос.
.При
изменении Ф изменяется как ω0,
так и β. В области малых моментов
сопротивления уменьшение магнитного
потока возбуждения приводит к росту
частоты вращения. В области больших
моментов сопротивления, уменьшение Ф
приводит к уменьшению ω. При обрыве
обмотки возбуждения двигателя на
холостом ходу происходит рост частоты
вращения, двигатель идет в разнос.
3. Электромеханические системы переменного тока, пуск, торможение, регулирование частоты вращения. Электромеханические системы переменного тока
ЭМС переменного тока основаны на использовании двигателей переменного тока, среди которых выделяются несколько типов:
Асинхронный электродвигатели (АД) с коротко замкнутым ротором.
АД с фазным ротором.
Двухфазные АД (конденсаторные)
Синхронные.
Наибольшее распространение находят трехфазные АД с короткозамкнутым ротором, трактом. Они имеют высокую надежность, большую долговечность. Не требует технического обслуживания и при использовании частотных преобразователей позволяет регулировать частоту вращения в широких пределах. Взрывопожаро-защищенность(нет искрения).
Недостатки: - меньшая удельная мощность;
- сложность создания микромашин;
Ротор АД имеет конструкцию аналогичную якорю ДПТ. Но концы обмоток ротора не присоединены к пластинам коллектора, а замкнуты накоротко.
Статорные обмотки подключаются к трехфазному переменному напряжению по схеме звезда или по схеме треугольник.
 .
.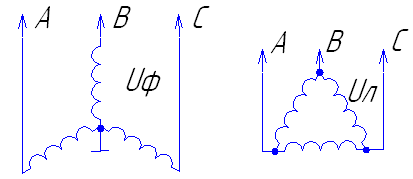
Трехфазное напряжение представляет собой три синусоиды, имеющие одинаковые амплитуды и частоту 50 Гц и фазовый сдвиг 120 электрических градусов.
Частота вращения
ротора n2
меньше n1,
отсюда называется асинхронный, то есть
вращается с разной частотой вращения.
Если n1=n2,
то вращающиеся магнитное поле не
пересекает витки ротора, индукционный
ток в них не образуется, тогда момент=0.
Относительная разность частоты вращения
асинхронного двигателя называется
скольжением.![]()
Момент развиваемый асинхронным двигателем может быть описан формулой Клосса:
 ; Мкр и Sкр
– это критические значения момента и
скольжения.
; Мкр и Sкр
– это критические значения момента и
скольжения.
О сновным
достоинством Клосса является возможность
описания момента двигателя через его
паспортные данные.
сновным
достоинством Клосса является возможность
описания момента двигателя через его
паспортные данные.