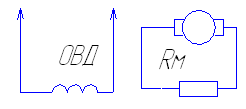
Пуск дпт
и
![]() Если
w=0,
то Е=0.
Если
w=0,
то Е=0.
![]() Rя
достаточно мало (от1 до 10 долей Ома),
поэтому пусковой ток значительно больше
номинального.
Rя
достаточно мало (от1 до 10 долей Ома),
поэтому пусковой ток значительно больше
номинального.
![]() -- кратность пускового тока. Графики
переходного процесса смотри в вопросе:
Моделирование разомкнутых электромеханических
систем. График тока и частоты вращения
от времени.
-- кратность пускового тока. Графики
переходного процесса смотри в вопросе:
Моделирование разомкнутых электромеханических
систем. График тока и частоты вращения
от времени.
Возникновение пусковых токов приводит к резкому увеличению момента двигателя.
К перегрузке сети и якорной цепи двигателя.
Существует 2 способа пуска
Прямой
Реостатный
Возможность прямого пуска рассматривается для каждого момента отдельно. Обычно используется для двигателей мощностью до 1 кВт.
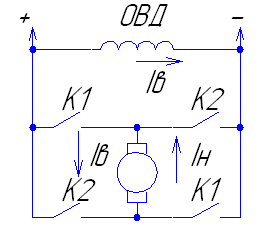
В
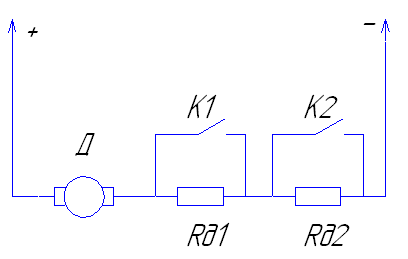 начальный момент пуска в якорную цепь
вводят пусковые сопротивления Rд1
и Rд2,
а по мере разгона двигателя их шунтируют
контактами К1, К2. Пусковые сопротивления
подбираются таким образом, чтобы
кратность пускового тока составляла
3…5. Количество пусковых сопротивлений
определяет число ступеней реостатного
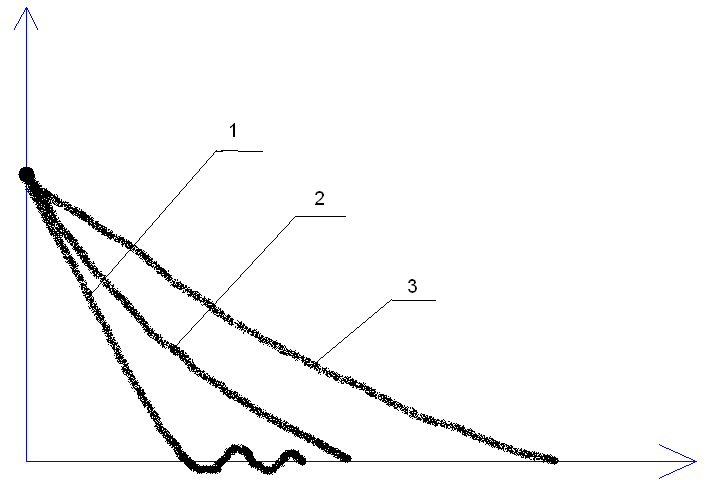
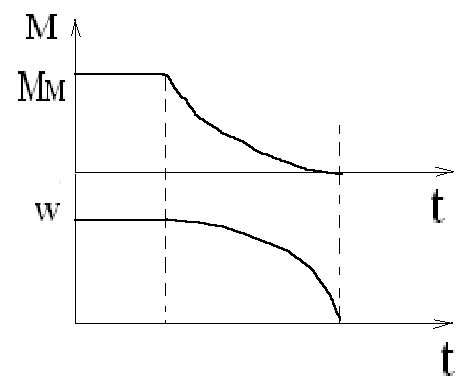
пуска. Графики
переходного процесса смотри в вопросе:
Моделирование разомкнутых
электромеханических систем. График
тока и частоты вращения от времени. Те
моменты в которых происходит спад
(смотри график тока) это моменты
шунтирования пусковых соединений.
Моменты времени и величины Rд1
и Rд2
подбираются таким образом, чтобы пики
тока якоря были приблизительно одинаковы.
начальный момент пуска в якорную цепь
вводят пусковые сопротивления Rд1
и Rд2,
а по мере разгона двигателя их шунтируют
контактами К1, К2. Пусковые сопротивления
подбираются таким образом, чтобы
кратность пускового тока составляла
3…5. Количество пусковых сопротивлений
определяет число ступеней реостатного
пуска. Графики
переходного процесса смотри в вопросе:
Моделирование разомкнутых
электромеханических систем. График
тока и частоты вращения от времени. Те
моменты в которых происходит спад
(смотри график тока) это моменты
шунтирования пусковых соединений.
Моменты времени и величины Rд1
и Rд2
подбираются таким образом, чтобы пики
тока якоря были приблизительно одинаковы.
В зависимости от времени отключения пусковых сопротивлений существует 3 вида реостатного пуска:
В функции времени (пусковые сопротивления отключают через заранее определенные промежутки времени);
В функции скорости (при заданных значениях скорости);
В функции тока (при заданных значениях тока якоря).
Наиболее часто применяется 1 вид, поскольку он исключает возможность «затянувшегося пуска», когда двигатель длительное время работает с пусковыми сопротивлениями в якорной цепи. Однако этот способ не учитывает изменений параметров ЭМС.
Торможение дпт
Если якорную цепь ДПТ отключить от сети, то через некоторое время двигатель остановится под действием момента сопротивления. Такая остановка называется свободным выбегом двигателя. При этом время торможения тем больше, чем меньше момент сопротивления и больше момент инерции.
Если время торможения оказывается по условию задачи недопустимо большим, то тогда применяют специальное торможение ДПТ:
Механическое.
Электрическое.
При механическом торможении используют специальные тормоза (существует 3 основных вида тормозов: барабанные, дисковые, ленточные). При этом кинетическая энергия вращающихся частей превращается в тепловую энергию. Основным недостатком механического торможения является наличие дополнительных устройств.
Электрическое торможение делится на 3 способа:
Генераторное;
Динамическое;
Торможение противовключением.
Возникает в том случае, когда w>w0, что возможно только под действием внешнего момента, направленного в ту же сторон, что и момент двигателя. Этот способ обычно применяется в грузоподъемных и транспортных механизмах при движении вниз.
 >
> E>U
E>U
 При этом кинетическая энергия превращается
в электрическую и отдается обратно в
сеть (происходит рециркуляция энергии).
При этом кинетическая энергия превращается
в электрическую и отдается обратно в
сеть (происходит рециркуляция энергии).Д
 ля
обеспечения динамического торможения
вращающийся по инерции якорь отключает
от сети и замыкает на тормозное
сопротивление при постоянном Ф.
ля
обеспечения динамического торможения
вращающийся по инерции якорь отключает
от сети и замыкает на тормозное
сопротивление при постоянном Ф.
 ,
то есть ток якоря изменяет свое
направление. Тормозной момент при
динамическом торможении является
функцией w.
Динамическое торможение наиболее
эффективно в начальный момент торможения
при высокой частоте вращения.
,
то есть ток якоря изменяет свое
направление. Тормозной момент при
динамическом торможении является
функцией w.
Динамическое торможение наиболее
эффективно в начальный момент торможения
при высокой частоте вращения.П
 ри
нем изменяют полярность включения,
вращающегося по инерции якоря двигателя.
ри
нем изменяют полярность включения,
вращающегося по инерции якоря двигателя.
 .
Возникающий при этом ток превышает
пусковой и при необходимости
устанавливается токо - ограничивающий
резистор якорной цепи. Этот способ
отличается должными тормозными моментами
и соответственно малым временем
торможения, но если при нулевой частоте
не отключать двигатель от сети, то
произойдет его реверсирование.
.
Возникающий при этом ток превышает
пусковой и при необходимости
устанавливается токо - ограничивающий
резистор якорной цепи. Этот способ
отличается должными тормозными моментами
и соответственно малым временем
торможения, но если при нулевой частоте
не отключать двигатель от сети, то
произойдет его реверсирование.
торможение противовключением
Динамическое торможение
свободный выбег