

Контрольные вопросы
Почему сейсморазведочные ИИС должны строиться по радиальной схеме?
Какие компоненты образуют СрК?
Составные элементы СрК с невоспроизводимой регистрацией.
Назначение сейсмоприёмника в СрК?
Назначение предварительного и выходного усилителей в СрК?
Составные части и назначение фильтров в СрК?
Назначение регистратора в СрК с невоспроизводимой регистрацией?
Что представляет собой сейсмограмма?
Чем обусловлена необходимость включения в СрК с невоспроизводимой регистрацией РДД?
Какие типы РДД вам известны?
С какой целью используется регистрация сейсмических сигналов на промежуточный носитель информации?
В чём отличия СрК с воспроизводимой и невоспроизводимой регистрацией?
Чем обусловлена необходимость включения РДД в тракт записи СрК с воспроизводимой регистрацией?
Чем обусловлена необходимость включения РДД в тракт воспроизведения СрК с воспроизводимой регистрацией?
В чём принципиальные преимущества цифрового СрК?
Что определяет динамический диапазон цифрового СрК?
Какие дополнительные элементы включает в себя цифровой СрК по сравнению с аналоговым СрК с воспроизводимой регистрацией?
4. Устройство и основы теории сейсмоприёмников
Сейсмоприёмник (СП) или геофон (в иностранной литературе) – устройство, воспринимающее механические колебания среды, в которой он установлен, и преобразующее их в электрические колебания (сигнал). Так как механические колебания среды есть непрерывная функция времени (t), то сигнал также является непрерывной функцией t, аналогом механических колебаний. (термин «аналоговый» в сейсморазведке синоним термина «непрерывный во времени»). Для преобразования механических колебаний в электрический сигнал используются следующие физические явления:
электромагнитная индукция;
пьезоэлектрический эффект;
изменение емкости воздушного конденсатора;
магнитострикционный эффект (точнее – эффект Виллари, обратный магнитострикции).
В наземных и скважинных наблюдениях используются главным образом электромеханические (индукционные) СП, в морской – пьезоэлектрические.
4.1. Индукционные сейсмоприёмники.
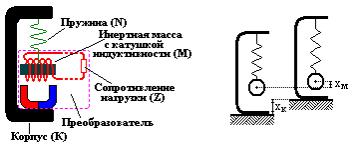
Конструктивная схема СП. Кинематическая схема СП.
Преобразователь представляет собой подвижную (подвешенную на пружине с одной степенью свободы) катушку, помещенную в поле постоянного магнита, жестко закрепленного на корпусе. При перемещении катушки изменяется величина магнитного потока, проходящего через катушку, и на её выводах возникает ЭДС.
4.1.1. Вывод дифференциального уравнения индукционного сп
Корпус СП с помощью штыка жестко закреплен на грунте.
Пусть в результате упругих колебаний корпус СП переместился вверх на расстояние хк.
Под действием сил инерции инертная масса сместилась вверх на хМ < хк. Относительное удлинение пружины (перемещение инертной массы относительно корпуса) составляет x = xM xк (25)
Примечания:
Возникновение ЭДС(и как следствие – электрического сигнала) связано с движением инертной массы: xM= xM(t); xк= xк(t).
2. При рассмотрении движения можно исключить силу начального растяжения пружины: при малых смещениях х она полностью уравновешивается силой тяжести.
Движение СП рассмотрим в спектральной области:
смещение корпуса xк(t) <=> Xк(w);
смещение катушки xM(t) <=> XM(w);
~ относительное смещение х(t) <=> X(w);
Движение инертной массы осуществляется при участии следующих сил:
Сила упругости пружины fy(t) <=> Fy(w)
При малой амплитуде колебаний fy(t) связано с удлинением fy(t) с законом Гука: fy(t) = N х(t) <=> Fy(w) = NX(w) (26)
где N – коэффициент упругости пружины;
Сила fy(t) имеет знак, противоположный знаку х(t),т.к. стремится восстановить первоначальное состояние пружины.
Сила инерции fn(t) <=> Fn()
В
соответствии с первым законом Ньютона
![]() fn(t)
прямо пропорционально ускорению инертной
массы и направлена в сторону, противоположную
ускорению.
fn(t)
прямо пропорционально ускорению инертной
массы и направлена в сторону, противоположную
ускорению.
fn(t)=
М![]() =
М
=
М
![]() (26)
(26)
В соответствии с теоремой о спектре производной:
Fn(w) = (j)2МХ()+Хк() (27)
* Сила затухания fT(t) <=> FT(w)
Для гашения собственных колебаний упругой системы СП в неё вводят элемент затухания. Для упрощения рассуждений примем ,что колебания системы {пружина+инертная масса} погружена в вязкую жидкость и на неё действует сила вязкого трения, которая при небольших скоростях перемещения прямо пропорциональна скорости смещения
fT(t)=
D![]() (28)
(28)
где D – коэффициент вязкого трения (или коэффициент демпфирования).
Согласно теореме о спектре производной FT (ω) = jω D X(ω) (29)
Кроме механических сил в СП действует электромагнитная сила, возникающая в схеме индукционного преобразователя.
Скорость
смещения инертной массы ( катушки)
относительно магнита
![]() .
Тогда ЭДС в обмотке: e
=w
.
Тогда ЭДС в обмотке: e
=w
![]() =
=
![]()
![]() (30)
(30)
где w – число витков катушки,
- магнитный поток, пронизывающий виток,
=
![]() – коэффициент электромеханической
связи. (31)
– коэффициент электромеханической
связи. (31)
Сила
тока, создаваемого ЭДС i=![]() , (32)
, (32)
где Zкомплексное сопротивление электрической .цепи (будем полагать чисто активным; Z=R).
При протекании тока i в катушке преобразователя создаётся электромагнитная сила fэ(t), направленная в сторону, противоположную направления смещения катушки (правило Ленца):
fэ(t)= w·i (33)
~ с учётом (31): fэ(t)= - i
~
заменяя i
из(32) и учитывая (30): fэ(t)=
2![]() (34)
(34)
~
в спектральной области: fэ(t)
<=> Fэ()=![]() 2
X(
2
X(![]() (35)
(35)
= В соответствии с правилом Д’Аламбера уравнение движения инертной массы можно записать как :fy(t) + fn(t) + fT(t) = fэ(t) =0 В частотной области оно будет иметь вид:
NX (jw)2(X+Xk)MjwDX(jw 2X)/R=0 (36) Здесь Х=Х(w) и Хk= Хk(w)
~ Разделяя в (36) движение грунта и движение катушки получим:
{N+(jw)2M+(jw)(D+ 2/R)}X= (jw)2MXk = jwMG (37)
где G=G(w)=jwXk(w) спектр скорости смещения корпуса СП.
Т.О.соотношение (37) устанавливает связь между спектром смещения корпуса Хk(w) или спектром скорости смещения G(w) и спектром относительного перемещения инертной массыX(w).
Представим полное сопротивление электрической цепи как
R=R1+R2 (38)
где R1 сопротивление преобразователя; R2 сопротивление нагрузки.
Пусть измеряемой реакцией СП на механическое смещение является падение напряжения U(t) на нагрузке R2
Т.Е.
U(t)
=
![]()
U()
=
U()
=
![]() ,где
е(t)
E()
,где
е(t)
E()
Из (30) E(w)=(jw) Х(w).Тогда:
U(w)=![]()
![]() [(jw)
X]=
[(jw)
X]=
![]() [(jw)
X] (39)
[(jw)
X] (39)
Выражая X() через U(w) и заменяя в (37)
{(jw)2М+(jw)[D+
2/R]+N}![]() /
=(jw)МG(w),
или:
/
=(jw)МG(w),
или:
{(jw)2М+(jw)[D+
2/R]+N}U(w)=-![]() МG(w)
(40)
МG(w)
(40)
Выражение(40) в спектральной форме описывает действие индукционного СП, связывая спектр скорости смещения корпуса (G(w)) со спектром снимаемого с нагрузки напряжения (U((w)).
Слагаемые в левой части уравнения(40) можно рассматривать как: ~ 2 /R = D1 электрическое демпфирование.
Тогда можно представить:
~
![]() =
=![]() c коэффициент
затухания СП
c коэффициент
затухания СП
~
![]() =2
=2![]() f0c=w0c
частота
собственных колебаний СП
f0c=w0c
частота
собственных колебаний СП
~ ( R)/R=а ”чувствительность “ СП
Разделив на М левую и правую части выражения (40) можно записать:
[(jw)2+2(jw) c+w20c ]U(w)=а(jw)2 G(w) (41)