

Типовые динамические звенья. Передаточные функции
При анализе элементов автоматических систем выясняется, что разнообразные элементы, отличающиеся назначением, конструкцией, принципом действия и физическими процессами, описываются одинаковыми дифференциальными уравнениями, т.е. являются сходными по динамическим свойствам.
В ТАУ элементы автоматических систем с точки зрения их динамических свойств представляются с помощью небольшого числа элементарных (типовых) динамических звеньев. Под элементарным динамическим звеном понимается математическая модель искусственно выделяемой части системы, характеризуемая некоторым простейшим алгоритмом. Элементарные динамические звенья составляют основу для построения математической модели системы любой сложности. Классификация основных типов динамических звеньев приведена в таблице 3.2.
Основные типы звеньев делятся на четыре группы: позиционные, интегрирующие, дифференцирующие и неминимально-фазовые [2,4,5,12]. Позиционные, интегрирующие и дифференцирующие звенья относятся к минимально-фазовым. Важным свойством минимально-фазовых звеньев является однозначное соответствие амплитудной и фазовой частотных характеристик. Другими словами, по заданной амплитудной характеристике всегда можно определить фазовую и наоборот.
Понятие передаточная функция является наиболее важной категорией в теории автоматического управления и регулирования. Передаточная функция является своего рода математической моделью САУ, т.к. полностью характеризует динамические свойства системы.
Передаточная функция (ПФ) звена или системы представляет собой отношение изображения по Лапласу выходной величины Y ( р ) к изображению входной величины Х ( р ) при нулевых начальных условиях и равных нулю воздействиях на остальных входах элемента (системы), т.е.
![]() ,
,
Y(p),
X(p) - изображения по Лапласу выходной и
входной величин элемента (системы);
 ;
;
 - полиномы знаменателя и числителя
передаточной функции W(p).
- полиномы знаменателя и числителя
передаточной функции W(p).
Поскольку для линейных систем можно применить принцип наложения, то для типовой структурной схемы замкнутой САУ различают следующие основные ПФ, применяемые для исследований (рис.2.9):
ПФ
разомкнутой системы -
![]()
ПФ замкнутой САУ по управляющему воздействию –
![]()
ПФ замкнутой САУ по ошибке от управляющего воздействия -
![]()
ПФ замкнутой САУ по возмущающему воздействию -
![]()
ПФ замкнутой САУ по ошибке от возмущающего воздействия –
![]()
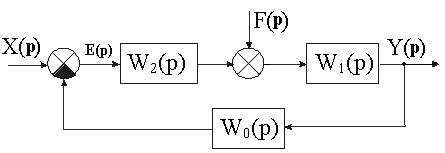
Рис.2.9. Структурная схема САУ
Полином знаменателя передаточной функции замкнутой системы называется характеристическим уравнением, который при исследованиях приравнивают к нулю, т.е. вместо него можно использовать Wp(p), а также полиномы числителя и знаменателя передаточной функции разомкнутой системы R(p) и Q(p):
1+Wp(p) = R(p) + Q(p) = 0 – характеристический полином замкнутой САУ.
Передаточные функции содержат особые точки на комплексной плоскости - нули и полюса. Полюса - это те значения р, при которых передаточная функция превращается в бесконечность. Для определения полюсов необходимо собственный оператор (знаменатель передаточной функции) приравнять к нулю и произвести решение алгебраического уравнения относительно р. Нули - это те значения р, при которых передаточная функция равна нулю. Для нахождения нулей числитель передаточной функции приравнивается к нулю и полученное алгебраическое уравнение решается относительно р. В связи с этим передаточная функция может быть представлена как отношение произведений элементарных сомножителей:
![]() где
i
и k
– полюса и нули передаточной функции.
где
i
и k
– полюса и нули передаточной функции.
Если задана структура САР, то можно определить передаточную функцию относительно любых двух точек структуры. При этом необходимо использовать существующие правила структурных преобразований. Передаточные функции элементов или отдельных участков схемы позволяют легко получить общее уравнение всей системы, а в случае необходимости перейти к дифференциальному уравнению.