

Тема №3. Типовые звенья сау и их характеристики
Виды и типы элементарных звеньев и их частотных характеристик, применяемых в ТАУ: а.ч.х., ф.ч.х., а.ф.х., л.а.ч.х., л.ф.ч.х. Позиционные звенья: безынерционное, апериодические, колебательное и консервативное. Интегрирующие и дифференцирующие звенья: идеальные и инерционные (реальные). Экспериментальное определение параметров типовых звеньев. Типы объектов и регуляторов. Понятие функциональных и структурных схем САУ. Правила преобразования структурных схем при различном соединении звеньев.
Типовые динамические звенья
Типовым динамическим звеном САУ является составная часть системы, которая описывается дифференциальным уравнением не выше второго порядка. Звено, как правило, имеет один вход и один выход. По динамическим свойствам типовые звенья делятся на следующие разновидности: позиционные, дифференцирующие и интегрирующие.
Позиционными звеньями являются такие звенья, у которых в установившемся режиме наблюдается линейная зависимость между входными и выходными сигналами. При постоянном уровне входного сигнала сигнал на выходе также стремится к постоянному значению.
Дифференцирующими являются такие звенья, у которых в установившемся режиме выходной сигнал пропорционален производной по времени от входного сигнала.
Интегрирующими являются такие звенья, у которых выходной сигнал пропорционален интегралу по времени от входного сигнала.
Звено считается заданным и определенным, если известна его передаточная функция или дифференциальное уравнение. Кроме того, звенья имеют временные и частотные характеристики.
Наличие нулевых корней в числителе или знаменателе ПФ типовых звеньев - признак для разбиения последних на три группы:
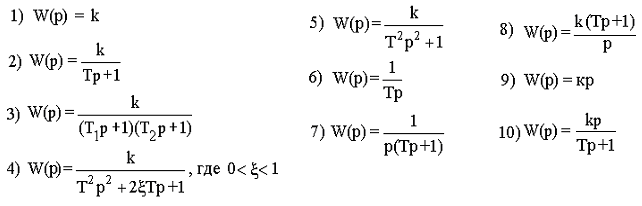
Позиционные звенья: 1, 2, 3, 4, 5 - не имеют нулевых корней и, следовательно, в области низких частот (т.е. в установившемся режиме) имеют коэффициент передачи, равный k.
Интегрирующие звенья: 6, 7, 8 - имеют нулевой корень в знаменателе передаточной функции и, следовательно, в области низких частот имеют коэффициент передачи, стремящийся к бесконечности.
Дифференцирующие звенья: 9, 10 - имеют нулевой корень в числителе передаточной функции и, следовательно, в области низких частот имеют коэффициент передачи, стремящийся к нулю.
Типы объектов регулирования
В зависимости от величины самовыравнивания различают три типа объектов управления: устойчивый (с положительным самовыравниванием); нейтральный (с нулевым самовыравниванием); неустойчивый (с отрицательным самовыравниванием). Признаком отрицательного самовыравнивания является отрицательный знак перед самой выходной величиной в левой части дифференциального уравнения или появление отрицательного знака у свободного члена знаменателя передаточной функции (наличие положительного полюса).
Законы регулирования
Под законом регулирования (управления) понимается алгоритм или функциональная зависимость, определяющая управляющее воздействие u(t) на объект:
u(t) = F() , где - ошибка регулирования.
Законы регулирования бывают:
линейные: u(t) = k1(t) + k2(t)dt + k3(t)dt2 + ... + k4'(t) + k5''(t) + ...
или u(t) = x(t)[k1 + k2/p + k3/p2 + ... + k4 p + k5 p2 + ...]; (3.1)
нелинейные: F1(u, du/dt, ...) = F2(x, dx/dt, ...; g, ...; f, ...) .
Кроме того, законы регулирования могут быть реализованы в непрерывном виде или в цифровом. Цифровые законы регулирования реализуются путем построения регуляторов с помощью средств вычислительной техники (микро ЭВМ или микропроцессорных систем).
Наличие в (3.1) чувствительности регулятора к пропорциональной, к интегральным или к дифференциальным составляющим в первичной информации x(t) определяет тип регулятора:
P – пропорциональный;
I – интегральный;
PI - пропорционально интегральный (изодромный);
PD - пропорционально дифференциальный;
и более сложные варианты - PID, PIID, PIDD, ... .
Нелинейные законы регулирования подразделяются на:
Функциональные;
Логические;
Оптимизирующие;
Параметрические.
В составе структуры САУ содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления путем выработки управляющего воздействия U в зависимости от ошибки (отклонения), т.е. U = f(). Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора. Закон регулирования определяет основные качественные и количественные характеристики систем.
Рассмотрим основные линейные законы регулирования. Простейшим является пропорциональный закон и регулятор в этом случае называют Р- регулятором. При этом U=U0+k , где U0-постоянная величина, k - коэффициент пропорциональности. Основным достоинством Р - регулятора является простота. По существу, это есть усилитель постоянного тока с коэффициентом усиления k. Недостатки Р - регулятора заключаются в невысокой точности регулирования.
Интегральный закон регулирования и соответствующий I - регулятор реализует следующую зависимость:
![]() ,
где Т -постоянная времени интегрирования.
,
где Т -постоянная времени интегрирования.
Техническая реализация I - регулятора представляет собой усилитель постоянного тока с емкостной отрицательной обратной связью. I - регуляторы обеспечивают высокую точность в установившемся режиме за счет повышения порядка астатизма. Вместе с тем I - регулятор вызывает уменьшение устойчивости переходного процесса и системы в целом.
П![]() ропорционально-интегральный
закон регулирования позволяет объединить
положительные свойства пропорционального
и интегрального законов регулирования.
В этом случае PI - регулятор реализует
зависимость:
ропорционально-интегральный
закон регулирования позволяет объединить
положительные свойства пропорционального
и интегрального законов регулирования.
В этом случае PI - регулятор реализует
зависимость:
![]()
Мощным средством улучшения поведения САУ в переходном режиме является введение в закон регулирования производной от ошибки. Часто эта производная вводится в пропорциональный закон регулирования. В этом случае имеем пропорционально-дифференциальный закон регулирования, регулятор является РD- регулятором, который реализует зависимость
![]()
Кроме PI и PD регуляторов часто на практике используют PID -регуляторы, которые реализуют пропорционально - интегрально - дифференциальный закон регулирования
![]()
Структурная схема линейного стандартного регулятора приведена на рис.3.1.
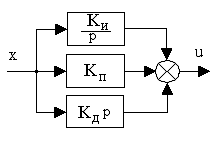
Рис. 3.1. Структура линейного стандартного регулятора
Настройка такого регулятора заключается в задании значений коэффициентов пропорциональной, интегральной и дифференциальной составляющих таким образом, чтобы удовлетворить требованиям качества управления в соответствии с выбранными критериями качества.