

Тема №2. Общие принципы составления уравнений динамики
Линеаризация уравнений динамики. Применение преобразования Лапласа в ТАУ. Векторно-матричное представление динамики работы САУ. Моделирование динамических звеньев и систем. Понятие передаточной функции, типового динамического звена. Типовые воздействия, применяемые при исследовании САУ.
Работу САУ можно описать словесно, что поможет понять принцип действия системы, ее назначение, особенности функционирования и т.д. Однако этот способ не является универсальным и, что самое главное, не дает количественной оценки характеристикам системы и качеству регулирования. Поведение САР в процессе функционирования представляет собой сочетание статических и динамических режимов. Для проведения теоретических исследований САР и её отдельных элементов необходимо иметь уравнения, описывающие их поведение при изменяющихся внешних воздействиях. Эти уравнения представляют собой выраженные в математической форме соотношения, связывающие входные и выходные сигналы и воздействия.
С целью упрощения получения математических соотношений обычно вводят следующие допущения:
- САР и ее элементы обладают свойством стационарности;
элементы САР являются линейными;
протекающие процессы являются непрерывными функциями времени при выполнении нулевых начальных условий.
Существуют аналитические, экспериментальные и комбинированные методы получения математического описания объектов управления. Аналитические методы базируются на использовании законов сохранения вещества и энергии (уравнения материального баланса). В настоящее время для многих классов объектов управления получены их математические модели. При получении таких описаний обычно оперируют с дифференциальными уравнениями в частных производных, т.к. переменные изменяются как во времени, так и в пространстве.
Достоинства аналитических методов:
не требуют проведения экспериментов на реальном объекте;
позволяют определить математическое описание еще на стадии проектирования системы управления;
позволяют учесть все основные особенности динамики объекта управления, как-то наличие нелинейностей, нестационарность, распределенные параметры и т.д.;
обеспечивают получение универсального математического описания, пригодного для широкого класса аналогичных объектов управления.
Недостатки:
трудность получения достаточно точной математической модели, учитывающей все особенности реального объекта;
проверка адекватности модели и реального процесса требует проведения натурных экспериментов;
многие математические модели имеют ряд трудно оцениваемых в численном выражении параметров (например, потокосцепление асинхронного двигателя).
Экспериментальные методы предполагают проведение серии экспериментов на реальном объекте управления. Обработав результаты экспериментов, оценивают параметры динамической модели объекта, задавшись предварительно ее структурой. Более подробный анализ экспериментальных методов определения динамических характеристик объектов управления приведен в теме №3.
Наиболее эффективными оказываются комбинированные методы построения математической модели объекта, когда, используя аналитически полученную структуру объекта, ее параметры определяют в ходе натурных экспериментов.
В обобщенном виде расчетную схему САР (САУ) или отдельного звена можно представить так, как показано на рис. 2.1.
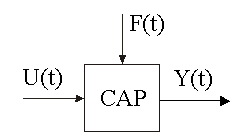
Рис.2.1. Обобщенная структурная схема САУ
Подавляющее большинство реальных элементов и систем имеют нелинейные характеристики и, следовательно, описываются нелинейными дифференциальными уравнениями. Однако, многие нелинейные элементы можно линеаризовать. Это позволяет для анализа и синтеза систем управления использовать методы теории линейных систем, которые наиболее просты и хорошо разработаны. Линеаризация уравнений геометрически может трактоваться как замена первоначальной кривой на касательную к ней прямую в точке установившегося режима.