

Методы повышения точности работы сау
Повышение точности работы САУ возможно с помощью изменения ее структуры или изменения параметров. Общими методами повышения точности являются:
Увеличение коэффициента усиления К разомкнутой системы (регулирование по отклонению с использованием П - регулятора).
Повышение порядка астатизма (регулирование по интегралу от ошибки с использованием ПИ – регулятора).
Применение регулирования по производным от ошибки (с применением ПД – регуляторов).
Использование комбинированного управления.
Введение неединичных обратных связей.
При регулировании по отклонению ошибка тем меньше, чем больше К. Метод эффективен, широко применяется, но в системах высокого порядка сказывается противоречие между требованием точности и требованием устойчивости. На рис.5.13 видно, что при увеличении К возрастает ср и уменьшается запас устойчивости.
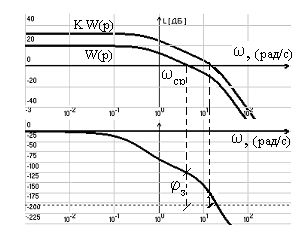
Рис.5.13. ЛЧХ при изменении К разомкнутой САУ
Повышение точности регулированием по интегралу от ошибки заключается в повышении порядка астатизма, что позволяет свести к нулю первые коэффициенты ошибок системы. Но в этом случае целесообразно повышать порядок астатизма без заметного или недопустимого снижения запаса устойчивости введением в САУ изодромных звеньев с передаточными функциями вида W(p)=(Tp+1)/p, но не более 23. Постоянную времени изодромных звеньев Т надо брать большой, чтобы вносимый ими фазовый сдвиг не был существенным в области частоты среза ср и не влиял на устойчивость системы. Регулирование по интегралу от ошибки ухудшает динамические свойства САУ, так как обычно Т изодромов обычно самые большие в системах.
При регулировании по производной от ошибки САУ начинает чувствовать не только наличие ошибки, но и тенденцию к изменению ее величины. Введение производной увеличивает запасы устойчивости, что в конечном итоге позволяет повысить коэффициент разомкнутой системы (точность САУ), т.е. целесообразно использовать ПД – регуляторы с передаточными функциями вида W(p)= К(Tp+1), но не более 23 для обеспечения требуемой помехозащищенности.
ВОПРОСЫ ПО ТЕМЕ № 5
1. Дайте понятие качества работы системы управления. Чем оно определяется?
2. Что представляют собой критерии качества?
3. Как производится оценка точности работы систем?
4. Чему равны первые два коэффициента ошибок в системах с астатизмом первого и второго порядков?
5. Поясните связь частотных показателей качества работы системы с частотными характеристиками разомкнутой цепи.
6. Что представляют собой корневые оценки качества?
7. В чем удобство и недостатки интегральных критериев качества?
8. Каким образом экспериментальным путем можно оценить качество работы системы?
9. Какова роль моделирования систем управления?
10. Перечислите методы повышения точности работы САУ?
11. Что такое статическая и динамическая точность систем управления?
12. Как определить добротность по скорости и ускорению?
Как влияет на динамические и статические свойства САУ увеличение коэффициента усиления регулятора?
14.
Какому значению на переходной
характеристике соответствует точка
ВЧХ при
![]() =
0?
=
0?
15. Какую форму имеет кривая переходного процесса САУ с вогнутой ВЧХ?
16. Какую форму имеет кривая переходного процесса САУ с трапециидальной ВЧХ?
17. Какую форму имеет кривая переходного процесса САУ с ВЧХ, имеющей экстремум?
18. Как оценить время переходного процесса по виду ВЧХ?
19. Как изменится кривая переходного процесса, если ВЧХ растянуть вдоль вертикальной оси?
20. Как изменится кривая переходного процесса, если ВЧХ растянуть вдоль горизонтальной оси?