

Точность работы сау
Оценка точности работы САУ подразумевает нахождение величины установившейся ошибки в различных типовых (детерминированных) режимах. Принято типовые режимы исследовать следующих видов, т.е. при подаче на систему воздействий:
Ступенчатое воздействие 1(t) 1/p;
Движение с постоянной скоростью 1(t) t 1/p2;
Движение с постоянным ускорением 1(t) t2/2 1/p3;
Движение по гармоническому закону 1(t) sin(t) /(p2 + 2).
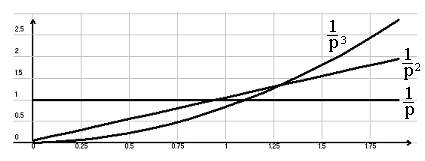
Рис.5.7. Типовые воздействия
![]()
На
рис.5.8 представлена обобщенная структурная
схема САУ с одним входом и одним
возмущающим воздействием, позволяющая
сформулировать правило определения
порядка астатизма по тому или иному
воздействию, где
![]() - передаточная функция регулятора;
- передаточная функция регулятора;
![]() - передаточная функция объекта управления;
G(p), F(p), U(p), Е(p), Y(p) – соответственно
изображения по Лапласу задающего и
возмущающего воздействий, рассогласования
(ошибки регулирования) и управляемой
величины.
- передаточная функция объекта управления;
G(p), F(p), U(p), Е(p), Y(p) – соответственно
изображения по Лапласу задающего и
возмущающего воздействий, рассогласования
(ошибки регулирования) и управляемой
величины.
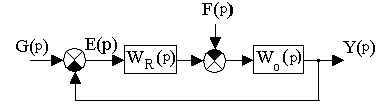
Рис. 5.8. Структурная схема системы управления
Изображение ошибки регулирования имеет вид:
![]() .
.
При
f(t) = 0
![]() - передаточная функция замкнутой системы
по ошибке относительно задающего
воздействия.
- передаточная функция замкнутой системы
по ошибке относительно задающего
воздействия.
При
g(t) = 0
![]() -
передаточная функция замкнутой системы
по ошибке относительно возмущающего
воздействия.
-
передаточная функция замкнутой системы
по ошибке относительно возмущающего
воздействия.
Изображение выходной переменной имеет вид:
![]() .
.
При
f(t) = 0
![]() - передаточная функция замкнутой системы
по задающему воздействию.
- передаточная функция замкнутой системы
по задающему воздействию.
При
g(t) = 0
![]() - передаточная функция замкнутой системы
по возмущающему воздействию.
- передаточная функция замкнутой системы
по возмущающему воздействию.
Таким образом, четверка передаточных функций Фg(p), Фf(p), Феg(p), Феf(p) полностью определяет замкнутую систему управления. Передаточная функция разомкнутой системы имеет вид:
![]() .
.
Передаточная функция разомкнутой системы W(p) имеет большое значение в классической теории управления, так как методы анализа и синтеза систем основаны на ее использовании.
Найдем передаточные функции замкнутой системы.
1. Передаточная функция замкнутой САУ по управляющему воздействию при f(t) = 0
![]() .
.
2. Передаточная функция замкнутой САУ по ошибке от управляющего воздействия при f(t) = 0
![]() .
.
3. Передаточная функция замкнутой САУ по возмущающему воздействию при g(t) = 0 и по ошибке от этого воздействия для САУ на рис.5.8 имеет вид
![]() .
.
Таким образом, передаточные функции замкнутой системы определяются передаточной функцией разомкнутой системы.
Из вышеприведенного вытекает следующее:
1.
![]() =0
– характеристическое уравнение замкнутой
САУ;
=0
– характеристическое уравнение замкнутой
САУ;
2.
![]() ;
;
3.
 ;
4.
;
4.
 .
.
Для оценки точности системы определяется установившаяся ошибка, которая может быть получена с помощью теоремы операционного исчисления о конечном значении функции:

где еg() – установившееся значение ошибки от задающего воздействия; еf() - установившееся значение ошибки от возмущающего воздействия.
Изображение ошибки от задающего воздействия имеет вид
Eg(p)= Фeg(p)G(p),
где Феg(p) - передаточная функция замкнутой системы по ошибке относительно задающего воздействия.
Для получения коэффициентов ошибок передаточная функция Фeg(p) раскладывается в степенной ряд
Фeg(p) = c0 + c1p + c2p2 + c3p3 + ...
Коэффициенты ci этого ряда называются коэффициентами ошибок и определяются из выражения
 при
i = 0, 1, 2, 3, ...
при
i = 0, 1, 2, 3, ...
Коэффициенты c0, c1 и c2 называются соответственно коэффициентами позиционной ошибки, скоростной ошибки и ошибки от ускорения.
Выражение для изображения ошибки от задающего воздействия примет вид
Eg(p) = (c0+ c1p+ c2p2+ c3p3+...)G(p).
Перейдя к оригиналу, выразим установившуюся ошибку через коэффициенты ошибок, задающее воздействие и его производные:
 .
.
Аналогично можно ввести понятие коэффициентов ошибок по возмущающему воздействию.
Рассмотрим ошибки регулирования для различных систем и различных типовых управляющих воздействий. Аналогичные результаты можно получить и для различных возмущающих воздействий с учетом порядка астатизма, так как САУ с астатизмом по управляющему воздействию может быть статической по возмущению.
Итак, если взять статическую САУ, то у нее в области низких частот передаточная функция разомкнутой системы W(p)p0 K. Подадим на вход замкнутой системы управляющее воздействие, представленное рядом Тейлора:
![]() ,
,
где g 0 - постоянная составляющая; - скоростная составляющая; - составляющая ускорения. Тогда установившееся значение ошибки управления будет

где ест = g0/(1+K) = const – статическая ошибка; еск = - скоростная ошибка; еуск = - ошибка по ускорению.
Т.е. в статических системах ошибка, вызванная заданием, равным константе, так же константа, но меньшая в (1+К) раз, а ошибки от заданий, меняющихся с постоянной скоростью или ускорением , нарастают до бесконечности.
Если САУ обладает астатизмом первого порядка, то передаточная функция разомкнутой системы в области низких частот W(p)p0 K/p. Тогда установившаяся ошибка управления будет
Т.е. в астатической системе первого порядка ошибка от задания, равного константе, равна нулю, ошибка от задания, меняющегося с постоянной скоростью, равна еск = /К , а ошибка от задания, меняющегося с постоянным ускорением, нарастает до бесконечности.
Если САУ обладает астатизмом второго порядка, то в области низких частот передаточная функция разомкнутой системы W(p)p0 K /p2.
Тогда установившаяся ошибка управления будет

Т.е. в астатической системе второго порядка ошибка от задания, равного константе, равна нулю, ошибка от задания, меняющегося с постоянной скоростью также равна нулю, а ошибка от задания, меняющегося с постоянным ускорением, равна еуск = /К.
Анализ показывает, что точность работы САУ с астатизмом зависит от величин, называемых добротностью по скорости К и ускорению К. На рис.5.9 приведены л.а.х. двух систем с астатизмом первого и второго порядка, по которым можно определить значения добротностей.
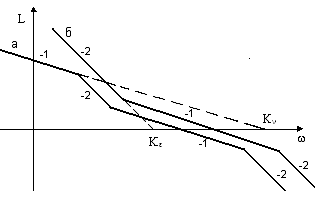
Рис.5.9. ЛЧХ астатических САУ: а – астатическая 1-го порядка;
б – астатическая 2-го порядка.
Если на вход САУ подать гармоническое воздействие g(t)=gmSin (kt), то установившаяся ошибка также будет изменяться по гармоническому закону с той же частотой:
е(t) = еm sin (кt+).
Точность системы в этом режиме оценивается по величине амплитуды ошибки, которую можно определить из амплитудно-частотной характеристики или модуля передаточной функции замкнутой системы. Следовательно
![]() .
.
Для реальных систем в большинстве своем справедливо W(j)>>1. В связи с этим единицей в знаменателе, приведенной выше формулы, можно пренебречь. Тогда амплитуда ошибки
![]() ,
,
где A() - модуль частотной передаточной функции разомкнутой системы.
Чтобы сформулировать правило для определения порядка астатизма по тому или иному воздействию, рассмотрим пример САУ с одним управляющим и одним возмущающим воздействием. Для примера (рис.5.10) возьмем ПИ – регулятор и нейтральный объект.
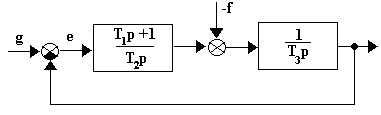
Рис.5.10. Структурная схема САУ
Найдем установившиеся ошибки системы при различных внешних воздействиях.
Передаточная функция замкнутой САУ по ошибке:
от управляющего воздействия
от возмущающего воздействия
1. Возьмем g(t)=g01(t), f(t)=f01(t). Тогда G(р)= g0 /p, F(p)= f0 /p.
Установившаяся ошибка от управляющего воздействия:

Установившаяся ошибка от возмущающего воздействия:

2. Возьмем g(t) = gm sin кt, f(t)=0. Тогда амплитуда ошибки
3. Подадим сигналы управления и возмущения, линейно нарастающие с постоянной скоростью, изображения которых G(р) = 1 /p2, F(p) = 2 /p2.
Скоростная установившаяся ошибка от управляющего воздействия:

Скоростная установившаяся ошибка от возмущающего воздействия:

4. Подадим сигналы управления и возмущения, нарастающие с постоянным
ускорением, изображения которых G(р) = 1 /p3, F(p) = 2 /p3.
Ошибка по ускорению от управляющего воздействия:

Ошибка по ускорению от возмущающего воздействия:

На основании приведенного выше анализа астатизма по управляющему и возмущающему воздействиям можно заключить: порядок астатизма по тому или иному воздействию определяется количеством интегрирующих звеньев в цепи обратной связи между интересующим воздействием и ошибкой управления. Таким образом, астатизм САУ по управляющему воздействию равен 2 (два интегрирующих звена в цепи обратной связи - между ошибкой е(t) и управляющим воздействием g(t)), а по возмущающему воздействию астатизм равен 1 (одно интегрирующее звено в цепи обратной связи - между ошибкой е(t) и возмущающим воздействием f(t)). Поэтому по управлению ст= ск=0 (две первые ошибки), а по возмущению только ст=0 (одна первая ошибка).
П р и м е р. Определить порядки астатизма по управляющему g(t) и возмущающему f(t) воздействиям САУ, структурная схема которой приведена на рис.5.11.
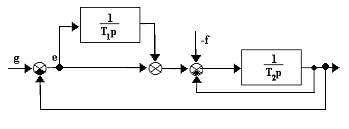
Рис.5.11. Структурная схема САУ
Р е ш е н и е. Сначала необходимо привести исходную структурную схему к одноконтурной, как показано на рис.5.12.

Рис.5.12. Приведенная структурная схема
Из рис. 5.12 видно, что при охвате идеального интегратора отрицательной обратной связью получается апериодическое звено 1-го порядка. Поэтому пользуясь правилом определения порядка астатизма, приведенным выше, можно заключить, и по управляющему, и по возмущающему воздействию астатизм равен 1.