

Вопрос № 4 Особенности исполнительных двигателей с якорным и полюсным управлением
Выше указывалось, что двигатели постоянного тока широко используются как исполнительные двигатели в системах автоматического регулирования, в счетно-решающих устройствах, в следящем приводе.Исполнительные двигатели (ИД) предназначены для точной отработки команд — сигналов, подаваемых в форме напряжения управления различной величины и соответствующей полярности. Мощность ИД обычно не превышает 0,6 кет. Двигатели постоянного тока наиболее полно отвечают одному из главных требований предъявляемых к ИД,— способности плавно и глубоко регулировать скорость вращения.На рис Малоинерционный исполнительный двигатель постоянного тока с полым якорем
Д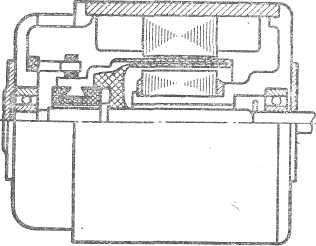 ля
восприятия сигнала управления цепь
якоря и цепь возбуждения
у ИД независимы, причем одна из цепей
включена постоянно,
ля
восприятия сигнала управления цепь
якоря и цепь возбуждения
у ИД независимы, причем одна из цепей
включена постоянно,
а на вторую подается напряжение управления.
При обычной схеме управления двигателем сигнал подается на обмотку якоря; обмотка возбуждения включена на постоянное напряжение (иногда поток возбуждения создается постоянными магнитами). Такое управление называется я к о р н ы м. Механические характеристики двигателя при якорном управлении соответствуют кривым рис. 16.37. Потребляемая обмоткой возбуждения мощность очень
невелика. Однако мощность сигнала должна быть значительной-практически она равна мощно-
 сти
ИД. Такой сигнал может быть получен
только от мощного усилителя.При
небольшой мощности усилителя (например,
электронного) применяют
полюсное
управление: цепь якоря. ИД включают(обычно
с добавочным сопротивлением) на постоянное
напряжение, а
цепь возбуждения воспринимает сигнал
управления от усилителя. Механические
характеристики двигателя при полюсном
управлении
соответствуют кривым. Они более мягкие,
чем при якорном
управлении ИД.
сти
ИД. Такой сигнал может быть получен
только от мощного усилителя.При
небольшой мощности усилителя (например,
электронного) применяют
полюсное
управление: цепь якоря. ИД включают(обычно
с добавочным сопротивлением) на постоянное
напряжение, а
цепь возбуждения воспринимает сигнал
управления от усилителя. Механические
характеристики двигателя при полюсном
управлении
соответствуют кривым. Они более мягкие,
чем при якорном
управлении ИД.
Точность отработки сигнала ИД повышается, если уменьшить момент инерции якоря. Это достигается, в частности, устройством. Конструкция микродвигателя с дисковым якорем и печатной обмоткой полого якоря (рис. 16.43), когда вращаются только коллектор и обмотка, запрессованная в пластмассовый «стакан». Но так как при этом увеличивается немагнитный зазор в машине, то увеличивается необходимая мощность возбуждения и габариты ИД.
Другим способом уменьшения инерционности ИД является применение относительно недавно разработанных микродвигателей с печатной обмоткой на дисковом якоре (рис. 16.44). Якорь представляет собой тонкий немагнитный диск / (из текстолита или керамики) с печатной однослойной волновой обмоткой. Плоские (из фольги) проводники обмотки расположены радиально по обеим сторонам диска и соединены между собой через отверстия в нем. Серебряно-графитовые щетки 2 скользят по поверхности проводников на одной стороне диска, подводя к якорю ток напряжением до 30 в.
Магнитный поток, создаваемый постоянными магнитами 3, пронизывает диск в осевом направлении, замыкаясь по кольцам 4 и 5 из мягкой стали. Корпус микродвигателя (крышки) немагнитный.
Электромеханическая постоянная времени дискового якоря весьма мала — около 0,01 сек.