

1.8. Помехи и шумы в измерительных системах.
1.8.1. Понятие шума и помехи.
Термин «шум» применяется ко всему, что маскирует полезный сигнал. Шумом может оказаться какой-нибудь другой сигнал – «помеха»
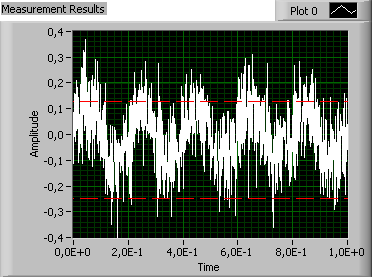
Под термином «Шум» понимается случайный сигнал различной физической природы, который объективно присущ объекту измерений или средству измерения и который накладывается на полезный информационный сигнал (рис. 1.39).
Шум характеризуется своим частотным спектром, распределением амплитуд, происхождением (источником шума).
Шумы возникают за счет различных физических процессов, протекающих в средствах измерений, в объекте измерений или в окружающей среде. Поэтому источником шумов может служить любой из элементов измерительной системы сам объект измерения, результат воздействия внешней среды на объект и средства измерений.
С
Рис.
1.39
Пример зашумленного синусоидального
сигнала.
Помехой называют нежелательное физическое воздействие внешней среды на объект или средства измерений, в том числе и посредством электромагнитных полей внешнего или внутреннего источника, которое препятствует нормальной работе средств измерений.
Как и шум, помеха характеризуется своим частотным спектром, распределением амплитуд, источником происхождения.
Если шум есть случайный сигнал различной физической природы, объективно присущий объекту измерения или средствам измерения и принципиально неустраним, то помеха – это сигнал, вызванный внешними естественными или искусственными причинами. Причем источник помехи, по крайней мере теоретически, всегда может быть определен, выявлен и устранен.
На практике часто бывает довольно трудно различить, что является шумом, а что помехой. Однако, среди различных источников и физических процессов, определяющих возникновение шума в измерительных системах, выделяют несколько, которые объективно присущи любым средствам измерений и существуют всегда. Вопрос только в величине сигнала этого шума относительно полезного сигнала.
1.8.2. Фундаментальные источники шумов.
Тепловой шум (Джонсоновский шум).
Любой элемент электрической цепи генерирует на своих концах некоторое случайное напряжение, которое обладает горизонтальным частотным спектром на всех частотах. Этот шум, плотность мощности которого одинакова на всех частотах, имеет статистическую природу и вызывается тепловыми флуктуациями скорости движения зарядов. Он обычно называется Джонсоновским шумом, по имени ученого, Б.Джносона, который экспериментально установил и описал явление, или шумом Найквиста - по имени ученого Г.Найквист, давшего теоретическое объяснение природы теплового шума.. Найквист также получил уравнение – формулу Найквиста (1), которая определяет среднеквадратичное значение уровня теплового шума:
![]()
здесь: R – значение сопротивления (Ом), k – постоянная Больцмана, Т – абсолютная температура в градусах Кельвина, В – полоса частот в Гц.
Амплитуда теплового шума в каждый момент времени непредсказуема, но подчиняется закону нормального распределения (Гаусса). Поэтому тепловой шум еще называют белым шумом.
При комнатной температуре Uш, R= 1,27 .10-4 R1/2 мкВ/Гц1/2 и в разомкнутой цепи на сопротивлении равном R= 10 кОм в полосе частот 10 кГц напряжение шума будет примерно 1,3 мкВ
Существование теплового шума означает, что любой системе, имеющей некий механизм потерь энергии, а следовательно любом датчике и в любой электронной схеме, всегда присутствует этот вид шума и всегда существует нижняя граница уровня шумов, которая принципиально не может быть устранена. Т.е. точность любых измерений ограничена наличием теплового шума
Дробовой шум
Электрический ток есть движение дискретных зарядов, причем количество элементарных зарядов, обеспечивающих протекание данного тока, всегда остается конечным. Поэтому, количество зарядов, пересекающих в заданное поперечное сечение проводника, будет хоть немного, но изменяться во времени. Следовательно, в проводнике всегда существуют флуктуации тока, которые носят статистический характер и среднеквадратичная величина которых определяется формулой:
![]()
где е = 1,6.10-19 Кл - заряд электрона, I - величина тока в цепи, А, В – полоса частот, Гц. При больших значениях тока дробовой шум пренебрежимо мал, но в измерениях малых токов, I < 0,1 мкА, относительная погрешность, вносимая дробовым шумом, будет весьма ощутима.
Дробовой шум как и тепловой джонсоновский шум, есть белый шум с гауссовым распределением и точно также всегда присутствует в измерительных системах..
В самом общем виде дробовой шум - «шум дождя по жестяной крыше», свойственен любым процессам переноса дискретной информации и может наблюдаться при измерениях любых дискретных величин.
Фликкер-шум (шум 1/f)
Тепловой и дробовой шум принципиально не могут быть устранены. Что обычный резистор, что специально изготовленный будут иметь одинаковый уровень шумов этих видов. Но реальные устройства имеют и другие источники «избыточных» шумов.
Так для резисторов характерен случай, когда при протекании тока возникают дополнительные флуктуации сопротивления, которые порождают напряжение шума, которое пропорционально протекающему току и складывается с постоянно присутствующим тепловым шумом. Величина этого шума зависит от конструкции и материала резистора, условий его работы, особенностей концевых соединений. Для различных типов резисторов величина этого шума может колебаться в пределах от 3,0мкВ до 0,01 мкВ. В наименьшей степени этот шум выражен для проволочных и металлопленочных резисторов, в наибольшей - для углеродно-композитных резисторов.
Этот шум имеет спектр, который соответствует примерно зависимости от частоты 1/f - , т.е. на каждую декаду частоты приходится примерно постоянная мощность шума, и иногда называется «розовым» шумом.
Первоначально фликкер-шум (шум 1/f) был обнаружен как медленные изменения характеристик различных электронных приборов и электронных схем. Однако, позднее стало ясно, что низкочастотный шум с амплитудой зависящей от частоты как 1/f присущ множеству физико-химических, геофизических, биологических и даже социальных систем. Точная природа этого шума пока до конца не выяснена. Принято считать, что фликкер-шум возникает в сложных системах, способных самопроизвольно накапливать энергию и освобождать ее по достижению некоторого порога. Такие системы, в принципе , обладают интересным свойством: они бурно откликаются на слабые и редкие внешние воздействия и слабо реагируют на сильные и частые.
С точки зрения измерений фликкер- шум является очень неприятным, особенно при измерениях медленно меняющихся величин. С ним, в частности, связывают такое явление как «дрейф нуля» измерительных приборов, медленные непрогнозируемые изменения напряжения электропитания электронных схем