

1.5 Оценка уровня помех в обрабатываемой реализации
При обработке экспериментальных реализаций представляет интерес уровень помех, присутствующих в этих данных. Для сигналов, которые можно представить в виде зашумленных сигналов (21), можно оценить амплитуду помехи (а). Из соотношений (24) – (26) можно выразить амплитуду помехи, присутствующую в эксперименте:
a2 = Ed/(Eh – Esh ) = Ed/Eh(1 – Кф2)
Энергия ошибки разложения Ed вычисляется в процессе разложения обрабатываемой реализации. Величины Eh, Esh, и Кф оцениваются выражениями (27), (39) и (40). Таким образом:
a2 = Ed/Dh(N – n) (1.41)
Напомним, что здесь Dh – дисперсия шума, N – число отсчетов в обрабатываемой реализации, n – количество базисных функций.
1.6. Оценка погрешностей разложения
Для зашумленных сигналов типа (21) в качестве погрешности dS(j) разложения естественно принять разность между разложением S(j) зашумленного сигнала и идеальным (незашумленным) сигналом S0(j).
Учитывая выражения (21) и (22) можно записать:
dS(j) =
S(j) – S0(j)
=![]() =
=![]() (1.42)
(1.42)
Здесь dCk = Ck – C0k – погрешности разложения в области параметров сигнала.
Из рассмотрения треугольника a0a1a3 (рис.3) можно получить:
dS(j) = S(j) – S0(j) = аSh(j) (1.43)
Вектор аSh(j) был определен выше, как проекция помехи на базисную гиперплоскость Sn, амплитуда помехи а оценивается соотношением (41).
На Рис.4 представлен треугольник а0а1а3 из Рис.3, расположенный в базисной гиперплоскости Sn. При обработке экспериментальных данных вектор S(j) становится известным, вектора же S0(j) и аSh(j) – неизвестны. Однако длина L вектора aSh(j), характеризующего ошибку разложения, может быть оценена с помощью соотношений (39), (40),(41):
L = a![]() =
=
![]() =
Кф
=
Кф (1.44)
(1.44)
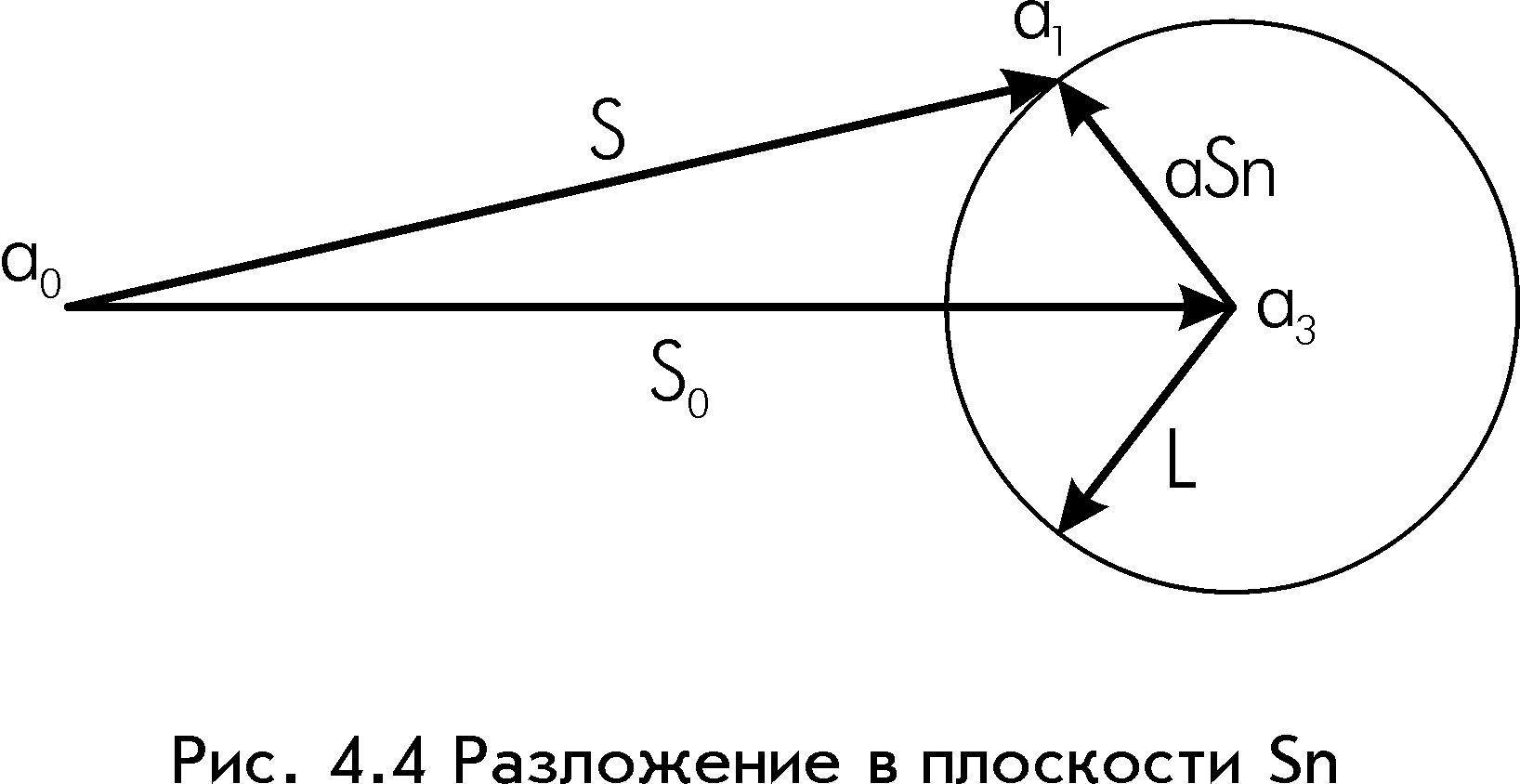
На Рис.4.4 приведена окружность (в общем случае гиперокружность) с центром в точке а3 и радиусом L (44). Истинное положение точки а3 (конца вектора S0(j)) лежит на
упомянутой окружности, что и является оценкой погрешности разложения.
Сравнивая соотношения (42) и (43) можно получить:
=
a![]() (1.45)
(1.45)
Отсюда
dCk = aChk , k = 1…n. (1.46)
Уравнения (46) показывает, что статистические характеристики ошибок коэффициентов разложения Ck могут быть оценены по статистическим характеристикам коэффициентов Chk разложения шума. Дисперсию Chk с учетом (31) можно записать:
D[Chk]
= M[Chk
2]
=![]() (1.47)
(1.47)
Подставив сюда (36), получим:
D[Chk]
= Dh
![]() (1.48)
(1.48)
Внутренняя сумма в (48) является элементом единичной матрицы в силу (31) , поэтому:
![]()
Отсюда и из (48)
D[Chk]=DhQkk (1.49)
Таким образом, дисперсию ошибок вычисления коэффициентов разложения сигналов типа (21) можно выразить из (46) и (49) следующим образом:
D[dCk]=a2DhQkk (1.50)