

2.2.2. Исходные данные для расчета:
Водоизмещение судна; D; т
Длина судна; L; м
Ширина судна; В; м
Осадка ; Т; м
Скорость судна; u; км/ч
Максимальный угол перекладки руля; max; град
Время перекладки руля; ТП; с
КПД рулевой машины; М;
Передаточное число привода; i;
Время работы при переменных курсах; T; мин
Число перекладок в час; N;
Средний угол перекладки ; СР; град
Напряжение судовой сети; U; В
2.2.3. Порядок расчета электродвигателя рулевого электропривода на постоянном токе.
Площадь пера руля
 ,
м2,
,
м2,
где T – осадка при максимальной загрузке, м,
L – длина судна, м,
b = 12 – 22 у речных винтовых судов,
b = 30 – 40 для озерных судов, морских буксиров,
b = 40 – 50 для грузовых судов дальнего плавания,
b = 50 – 70 для трансатлантических судов.
При наличии на судне двух гребных винтов принимаем два простых пластинчатых руля:
S1 = S2 = S / 2, м2
Размеры каждого руля выбираем из условия осадки судна: h = Т – (0,3 0,5 ¸ 1,0), м; b = S1 / h, м.
Сила (Н) давления на перо каждого руля
![]() ,
где С = 195 – 220 для двухвинтовых судов, С
= 370 – 415 для одновинтовых судов, - угол
перекладки руля, u – скорость судна,
м/с.
,
где С = 195 – 220 для двухвинтовых судов, С
= 370 – 415 для одновинтовых судов, - угол
перекладки руля, u – скорость судна,
м/с.
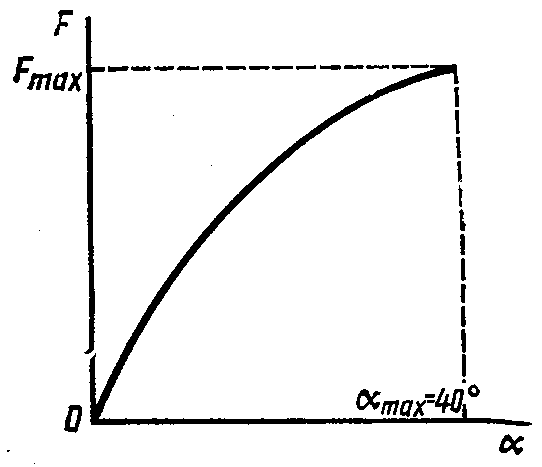
Задаемся коэффициентом С и определяем значение F для углов = 5, 10, 15, 20. 25, 30, 35 и 40 . Расчеты сводим в таблицу:
a ° |
sin |
0,2 + 0,3 sin |
|
S1 u2
|
F |
|
|
|
|
|
|
По полученным данным строим характеристику F = f().
5.
Радиус – расстояние точки приложения
силы Fa
до оси баллера руля
![]() .
Так как величина радиуса r зависит от
угла поворота пера руля, то вычисляем
его значение для углов = 5, 10, 15, 20, 25,
30, 35, 40 . Расчеты сводим в таблицу:
.
Так как величина радиуса r зависит от
угла поворота пера руля, то вычисляем
его значение для углов = 5, 10, 15, 20, 25,
30, 35, 40 . Расчеты сводим в таблицу:
a ° |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
r, м |
|
|
|
|
|
|
|
|
По полученным данным строим характеристику r = f ().
Момент (Нм) на баллере руля
 .
.
Определяем момент на баллере руля для каждого значения угла и заносим в таблицу:
a ° |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
|
|
|
|
|
|
|
|
|
Момент, создаваемый от двух рулей на оси сектора рулевой машины, рассчитываем по формуле Мбал = 2 и заносим в таблицу:
a ° |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
Мбал, Нм |
|
|
|
|
|
|
|
|
По данным таблицы строим зависимость Мбал = f ().
Максимальный момент на валу электродвигателя:
![]() .
.
Момент на валу электродвигателя (Нм) при холостом ходе рулевого электропривода М0 = aМдв.max, где a = М0 / Мдв.max = 0,1 0,2.
Момент стоянки электродвигателя под током МКЗ = 1,6 Мдв.max, где МКЗ / Мдв.max = 1,5 2.
Скорость вращения при холостом ходе электродвигателя
![]() ,
рад/с.
,
рад/с.
Время перекладки руля принимают без времени разгона электропривода (2 – 3 с).
Номинальный момент на валу электродвигателя МН = МКЗ / 2.
Угловая скорость вращения электродвигателя:
при
моменте холостого хода электропривода
![]() ,
рад/ с;
,
рад/ с;
при
номинальном моменте
![]() ,
рад/с.
,
рад/с.
Номинальная мощность электродвигателя Рн = Мн н, Нм. Выбираем из каталога электродвигатель постоянного тока.
Номинальный момент электродвигателя Мн = Рн / н
Момент инерции, приведенный к валу электродвигателя, J = Jдв. выбираем из условия: = 1,1 1,3 для механизмов подъема, поворота, передвижения кранов, лебедки, шпиля, брашпиля с i 25; = 1,25 1,4 для механизмов непрерывного транспорта, компрессоров, работ через редуктор с i 25.
Проверяем выбранный электродвигатель по режимам работы (время, моменты, нагрев).
ПЕРИОД 1. Включение электродвигателя и его разгон до установившейся скорости w0 при постоянном моменте сопротивления М0.:
1).
Время разгона (с)
![]() ;
1
= Н.
;
1
= Н.
2). Угол (рад), на который будет положен руль при разгоне
![]() ,
т.к.
,
т.к.
![]() .
.
3). Среднеквадратичный момент МЭ1 (Нм) за 1 период работы при изменении момента на двигателе от МКЗ до М0:
![]() .
.
ПЕРИОД 2. Установившееся движение электродвигателя.
1). Время (с), за которое руль будет переложен от борта до диаметральной плоскости при постоянном моменте сопротивления М0:
![]() ,
,
где бал у – угол (рад) перекладки пера руля при установившемся режиме работы электропривода
(бал max = бал у + бал р ).
2).
Общее время (с) работы за 1 и 2 периоды:
![]() .
.
3). Угол (рад) перекладки пера руля бал 1 = aбал р + aбал у.
4). Момент на валу электродвигателя равен моменту холостого хода, т.к. при перекладке пера руля от борта к диаметральной плоскости, силы, действующие на руль, помогают перекладке: МЭ2 = М0.
5). Угловая скорость вращения (рад/с) электродвигателя в течение периода 2 будет равна 0.
ПЕРИОД 3. Работа электропривода руля при изменении момента сопротивления от М0 до Мmax с изменяющейся скоростью вращения электродвигателя от 0 до min:
1). Время (с) перекладки руля от диаметральной плоскости на борт
![]() .
.
2). Среднеквадратичный момент (Нм) на валу электродвигателя за период
![]() .
.
3). Угловая скорость вращения (рад/с) в конце периода 3:
![]() .
.
ПЕРИОД 4. Торможение электродвигателя происходит при отключении двигателя от сети. Электродвигатель тормозится моментом сопротивления М0max от 3 до 0.
1). Время торможения (с) с учетом дополнительного момента торможения МТ: МТ = (0,5 1) МКЗ (Нм)
 .
.
m = МТmax / МКЗ = (0,5 1); JТ – момент инерции руля, соединительной муфты и червяка (если самотормозящая система) или всего электропривода, если система не самотормозящая, приведенный к валу электродвигателя (см. п. 18).
2). Среднеквадратичный момент (Нм) периода 4:
![]() .
.
3). Угол поворота пера руля (рад) за время торможения:
![]() .
.
4). Эквивалентная скорость (рад/с) за период 4:
![]() .
.
5). Общее время (с)перекладки руля с борта на борт:
ТП = tР + tУ + t2 + t3.
По требованиям Регистра ТП 30с.
6). Эквивалентный момент (Нм) при перекладке руля с борта на борт

7). Средняя скорость (рад/с), развиваемая электродвигателем за период перекладки руля с борта на борт
![]() ,
,
угол изменяется от max до +max.
8). Эквивалентная мощность (кВт) электродвигателя за период перекладки руля: РЭ = МЭ СР РН (у выбранного двигателя). Если это условие выполняется, то двигатель удовлетворяет по режиму перекладки руля с борта на борт.
Проверяем электродвигатель при ходе по курсу.
1). Время t1 (с) разгона электродвигателя до угла поворота баллера руля СР = 5
![]() .
.
2). Сумма произведений квадратов моментов на время, за которое происходит изменение этих моментов, за период разгона t1:
 ,
(Нмс).
,
(Нмс).
3). Время торможения (с) электродвигателя
 .
.
4). Угол поворота руля (рад) за время торможения
![]() .
.
5). Тормозной момент (Нм) в начале торможения
![]() .
.
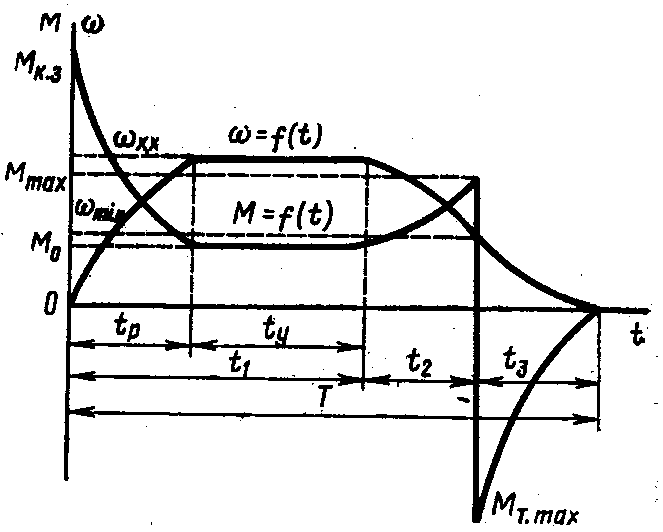
Рис. 2.5. Диаграмма
изменения момента и скорости вращения
рулевого электродвигателя при
перекладке руля с борта на борт: Т –
полное время перекладки руля; tР
– время разгона электропривода, tУ
– время установившейся работы
электропривода при перекладке руля
с борта до диаметральной плоскости,
t2
– время перекладки руля от диаметральной
плоскости на борт; t3
– время остановки электропривода
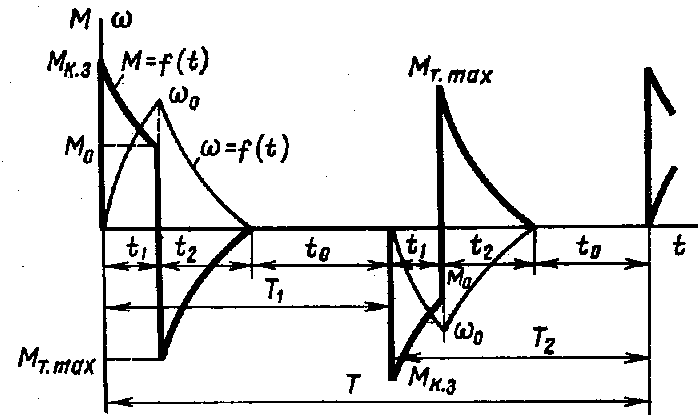
Рис. 2.6. Диаграмма
изменения момента и скорости вращения
рулевого электродвигателя при
удержании судна на курсе: t1
– время пуска электропривода, t2
– время остановки электропривода,
t0
– время стоянки электропривода, Т1
– полное время перекладки руля от
диаметральной плоскости на угол ,
Т2
– полное время перекладки руля от
угла
до диаметральной плоскости, Т –
полное время перекладки руля
6). Сумма произведений квадратов моментов на время, за которое происходит изменение этих моментов, за период торможения:
 ,
(Нмс).
,
(Нмс).
7). Время (с) одного цикла при ходе по курсу
ТП = 3600 / N.
8). Время (с) паузы
t0 = ТП (t1 + t2).
9). Среднеквадратичный момент (Нм):
 .
.
10). Средняя скорость вращения (рад/с) электродвигателя при ходе по курсу:
![]() .
.
11). Эквивалентная мощность электродвигателя при ходе по курсу РЭ = МЭ СР РН (у выбранного двигателя). Если это условие выполняется, то двигатель удовлетворяет по режиму хода по курсу.
12). Относительная продолжительность включения электродвигателя:
![]() .
.
Примерные диаграммы изменения момента и скорости показаны на рис. 2.5, 2.6.
ПРИМЕР 2.2. Рассчитать рулевой электропривод с электродвигателем постоянного тока для буксирного теплохода-толкача мощностью 450 л.с.
Исходные данные
1 |
Водоизмещение судна |
D |
150 |
т |
2 |
Длина судна |
L |
28 |
м |
3 |
Ширина судна |
В |
8 |
м |
4 |
Осадка |
Т |
1,2 |
м |
5 |
Скорость судна |
u |
20 |
км/ч |
6 |
Максимальный угол перекладки руля |
max |
40º |
град |
7 |
Время перекладки руля |
ТП |
30 |
с |
8 |
КПД рулевой машины |
М |
0,33 |
|
9 |
Передаточное число привода |
i |
2000 |
|
10 |
Время работы при переменных курсах |
T |
60 |
мин |
11 |
Число перекладок в час |
N |
300 |
|
12 |
Средний угол перекладки |
СР |
5º |
град |
13 |
Напряжение судовой сети |
U |
220 |
В |
1.
Площадь пера руля
![]() ,
м2,
,
м2,
где T – осадка при максимальной загрузке, м,
L – длина судна, м,
b = 12 – 22 у речных винтовых судов,
b = 30 – 40 для озерных судов, морских буксиров,
b = 40 – 50 для грузовых судов дальнего плавания,
b = 50 – 70 для трансатлантических судов.
При наличии на судне двух гребных винтов принимаем два простых пластинчатых руля:
S1 = S2 = S / 2 = 1,4 м2
2. Размеры каждого руля выбираем из условия осадки судна (рис. 2.7):
3. Сила (Н) давления на перо каждого руля
![]() ,
,
где С = 195 – 220 для двухвинтовых судов, С = 370 – 415 для одновинтовых судов,
- угол перекладки руля, град, u – скорость судна, м/с (20 км/ч = 5,5 м/с).
Задаемся коэффициентом С = 200 и определяем значение F для углов = 5, 10, 15, 20, 25, 30, 35 и 40 . Расчеты сводим в таблицу:
a ° |
sin |
0,2 + 0,3 sin |
|
S1 u2
|
F |
5 10 15 20 25 30 35 40 |
0,087 0,174 0,259 0,342 0,423 0,5 0,573 0,643 |
0,226 0,252 0,278 0,303 0,327 0,35 0,372 0,393 |
885 794 719 660 612 571 538 509 |
42,4 |
3265 5858 7895 9570 10976 12105 13071 13877 |
Рис. 2.7. Форма
пластинчатого руля
Рис. 2.8.
Зависимость силы F давления воды на
перо руля от угла
перекладки
Рис. 2.9.
Зависимость радиуса r (точки приложения
силы F)
давления на перо руля от угла
перекладки
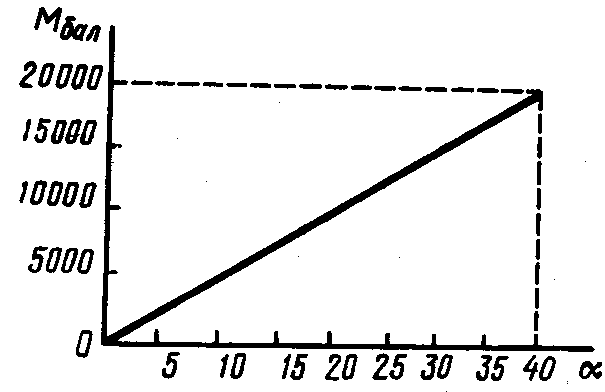
Рис. 2.10.
Зависимость момента Мс
сопротивления на баллере руля от угла
перекладки

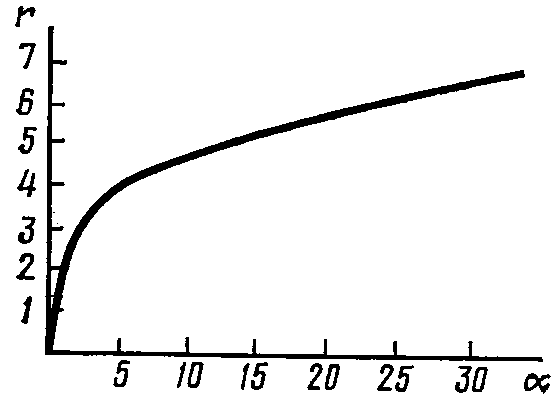
5. Определяем радиус – расстояние точки приложения силы Fa до оси баллера руля
![]() .
.
Так как величина радиуса r зависит от угла поворота пера руля, то вычисляем его значение для углов = 5, 10, 15, 20, 25, 30, 35, 40 . Расчеты сводим в таблицу :
a ° |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
r, м |
0,395 |
0,441 |
0,487 |
0,530 |
0,572 |
0,613 |
0,651 |
0,688 |
6. По полученным данным строим характеристику r = f () (рис. 2.9).
7.
Момент (Нм) на баллере руля
![]() .Определяем
момент на баллере руля для каждого
значения угла и заносим в таблицу:
.Определяем
момент на баллере руля для каждого
значения угла и заносим в таблицу:
a ° |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
, Нм |
1290 |
2583 |
3845 |
5072 |
6278 |
7420 |
8509 |
9547 |
8. Момент, создаваемый от двух рулей на оси сектора рулевой машины, рассчитываем по формуле Мбал = 2 и заносим в таблицу:
a ° |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
Мбал, Нм |
2580 |
5166 |
7690 |
10144 |
12556 |
14840 |
17018 |
19094 |
9. По данным таблицы строим зависимость Мбал = f () (рис. 2.10).
10. Максимальный момент на валу электродвигателя:
![]() .
.
11. Момент на валу электродвигателя (Нм) при холостом ходе рулевого электропривода
![]() ,
где a
= М0
/ Мдв.max
= 0,1 0,2, принято а
= 0,143.
,
где a
= М0
/ Мдв.max
= 0,1 0,2, принято а
= 0,143.
12. Момент стоянки электродвигателя под током
![]() ,
,
где МКЗ / Мдв.max = 1,5 2, принято МКЗ / Мдв.max = 1,6
13. Скорость вращения при холостом ходе электродвигателя
Время перекладки руля принимают без времени разгона электропривода (2 – 3 с): Т = 27с
14.
Номинальный момент на валу электродвигателя
![]()
15. Угловая скорость вращения электродвигателя:
при
моменте холостого хода электропривода
![]()
при
номинальном моменте
![]() .
.
16. Номинальная мощность электродвигателя
![]() .
.
Выбираем из каталога электродвигатель постоянного тока напряжением 220В, со смешанным возбуждением, типа П-51, мощностью 2,2 кВт при 750 об/мин (78,5 рад/с), маховый момент GD2 = 0,35кГм2 (J = 0,086 кгм2), наибольшая скорость вращения 1500 об/мин (156 рад/с), КПД = 73,5%.
17. Номинальный момент электродвигателя
![]()
18, Момент инерции, приведенный к валу электродвигателя,
![]() ,
,
где = 1,3 1,6 – коэффициент, учитывающий моменты инерции всех вращающихся частей рулевого механизма.
Проверяем выбранный электродвигатель по режимам работы (время, моменты, нагрев).
ПЕРИОД 1. Включение электродвигателя и его разгон до установившейся скорости w0 при постоянном моменте сопротивления М0:
1).
Время разгона (с)
![]() ;
;
2). Угол (рад), на который будет положен руль при разгоне
![]() ,
,
3). Среднеквадратичный момент МЭ1 (Нм) за период 1 работы руля при изменении момента на двигателе от МКЗ до М0:
![]() .
.
ПЕРИОД 2. Установившееся движение электродвигателя.
1). Время (с), за которое руль будет переложен от борта до диаметральной плоскости при постоянном моменте сопротивления М0:
![]() ,
где
,
где
бал у – угол (рад) перекладки пера руля при установившемся режиме работы электропривода
2).
Общее время (с) работы за 1 и 2 периоды:
![]() .
.
3).
Угол (рад) перекладки пера руля
![]() .
.
4). Момент на валу электродвигателя равен моменту холостого хода, т.к. при перекладке пера руля от борта к диаметральной плоскости, силы, действующие на руль, помогают перекладке: МЭ2 = М0 = 3,86 Нм
5). Угловая скорость вращения (рад/с) электродвигателя в течение периода 2 будет равна 0 = 124 рад/с
ПЕРИОД 3. Работа электропривода руля при изменении момента сопротивления от М0 до Мmax с изменяющейся скоростью вращения электродвигателя от 0 до min:
1). Время (с) перекладки руля от диаметральной плоскости на борт
![]() .
.
2). Среднеквадратичный момент (Нм) на валу электродвигателя за период
![]() .
.
3). Угловая скорость вращения (рад/с) в конце периода 3:
![]() .
.
ПЕРИОД 4. Торможение электродвигателя происходит при отключении двигателя от сети. Электродвигатель тормозится моментом сопротивления М0max от 3 до 0.
1). Время торможения (с) с учетом дополнительного момента торможения МТ.max, который примем равным 0,5 МКЗ (Нм)
где m = МТmax / МКЗ = 0,5
2). Среднеквадратичный момент (Нм) периода 4:
 .
.
3). Угол поворота пера руля (рад) за время торможения:
![]() .
.
4). Эквивалентная скорость (рад/с) за период 4:
![]() .
.
5). Общее время (с)перекладки руля с борта на борт:
![]()
Удовлетворяет требованиям Регистра (ТП 30с)
6). Эквивалентный момент (Нм) при перекладке руля с борта на борт
7). Средняя скорость (рад/с), развиваемая электродвигателем за период перекладки руля с борта на борт
![]() ,
,
(угол изменяется от max до +max)
8). Эквивалентная мощность (кВт) электродвигателя за период перекладки руля:
![]() ,
,
т.к. РЭ РН = 2,2 кВт, то двигатель удовлетворяет по режиму перекладки руля с борта на борт.
Проверяем электродвигатель при ходе по курсу.
1). Время t1 (с) разгона электродвигателя до угла поворота баллера руля
(СР = 5 = 0,087 рад):
![]() .
.
2). Сумма произведений квадратов моментов на время, за которое происходит изменение этих моментов, за период разгона t1:

3). Время торможения (с) электродвигателя
 .
.
4). Угол поворота руля (рад) за время торможения
![]() .
.
5). Тормозной момент (Нм) в начале торможения
![]() .
.
6). Сумма произведений квадратов моментов на время, за которое происходит изменение этих моментов, за период торможения:

7).
Время (с) одного цикла при ходе по курсу
![]()
8).
Время (с) паузы
![]()
9). Среднеквадратичный момент (Нм):
 .
.
10). Средняя скорость вращения (рад/с) электродвигателя при ходе по курсу:
![]() .
.
11). Эквивалентная мощность электродвигателя при ходе по курсу
![]()
Т.к. РЭ РН, то двигатель удовлетворяет по режиму хода по курсу.
12). Относительная продолжительность включения электродвигателя:
![]() .
.