

2.3.2. Исходные данные для расчета:
Грузоподъемность ; Q; т
Вес гака и стропов; Q0; кг
Скорость подъема и спуска грузов; 1; м/с
Скорость подъема и спуска гака; u0; м/с
Высота подъема груза из трюма; Н1; м
Высота спускания груза; Н2; м
Передаточное число редуктора; i;
КПД механических передач; М;
Радиус барабана; RБ; м
Напряжение судовой сети; U; В
2.3.3. Порядок расчета электродвигателя судовой грузовой лебедки. При расчете принимаются дополнительные условия:
торможение при остановке механическое;
опускание груза производится под действием силы собственного веса и гака на механическом тормозе при включенном электродвигателе;
опускание холостого гака производится работающим электродвигателем (силовой спуск).
ПРЕДВАРИТЕЛЬНЫЙ ВЫБОР МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
Выбираем мощность электродвигателя по максимальным параметрам (подъем номинального груза):
1). Вращающий момент (Нм) на валу электродвигателя – постоянный:
![]()
2).
Скорость вращения (рад/с) электродвигателя
при установившемся движении
![]() .
.
3).
Статическая мощность (Вт) на валу
электродвигателя при подъеме полного
груза
![]() .
.
4). Выбираем по каталогу электродвигатель постоянного тока со смешанным возбуждением с номинальными данными: UН; РН; nН; Н, GD2 с продолжительностью включения ПВ.
5). Номинальный момент на валу выбранного электродвигателя
Мном = Рном / ном.
ПРОВЕРКА ВЫБРАННОГО ДВИГАТЕЛЯ.
ПЕРИОД 1. Подъем с грузом.
1). Вращающий момент (Нм) на валу электродвигателя в период разгона:
М1max = (2 3) МН.
2). Динамический (избыточный) момент (Нм) при разгоне
М1дин = М1max М1ст.
3). Приведенным момент инерции к валу электродвигателя с учетом моментов инерции механических передач и груза J = Jдв.
выбираем из условия:
= 1,1 1,3 для механизмов подъема, поворота, передвижения кранов, лебедки, шпиля, брашпиля с i 25;
= 1,25 1,4 для механизмов непрерывного транспорта, компрессоров, работающих через редуктор с i 25.
4). Время разгона (с) электродвигателя:
![]() .
.
Остановка поднимаемого груза происходит при выключенном электродвигателе под действием сил тяжести груза.
5). Тормозной момент (Нм), приведенный к валу электродвигателя, от силы тяжести груза,
![]() .
.
6). Потери в электродвигателе (кВт):
![]() .
.
Для двигателей средней мощности постоянный потери Рпот1, создающие дополнительный тормозной момент, принимаются равными переменным потерям Рпот2, т.е. Рпот = Рпот1 + Рпот2, где Рпот1 = Рпот2 = Рпот / 2, (кВт).
7). Тормозной момент (Нм) в электродвигателе, вызываемый постоянными потерями,
![]() .
.
8). Время (с) остановки поднимаемого груза:
![]() .
.
9). Путь (м), пройденный грузом при его разгоне и остановке во время подъема,
![]() .
.
10). Время (с) подъема груза при установившемся режиме:
![]() .
.
ПЕРИОД 2. Тормозной спуск с грузом.
Разгон груза в начале спуска производится за счет силы его тяжести.
1). Статический момент (Нм), создаваемый силой тяжести груза при спуске и приведенный к валу электродвигателя,
![]() .
.
2).
Тормозной момент (Нм) от постоянных
потерь в электродвигателе, противодействующий
опусканию груза:
![]() .
.
3). Время разгона (с) груза при тормозном спуске с полным грузом:
![]() .
.
Остановка груза при спуске производится динамическим торможением электродвигателя, тормозной момент которого зависит от величины вводимого в цепь якоря сопротивления. Примем тормозной момент, создаваемый электродвигателем, М2Т = 2 МН, (Нм).
4). Динамический момент (Нм) торможения М2дин = М2Т – М2ст.
5).
Время остановки (с) спускаемого груза:
![]() .
.
6). Путь (м), пройденный грузом за время его разгона и остановки,
![]() .
.
7). Время (с) установившегося движения груза при тормозном спуске последнего
![]()
ПЕРИОД 3. Подъем холостого гака.
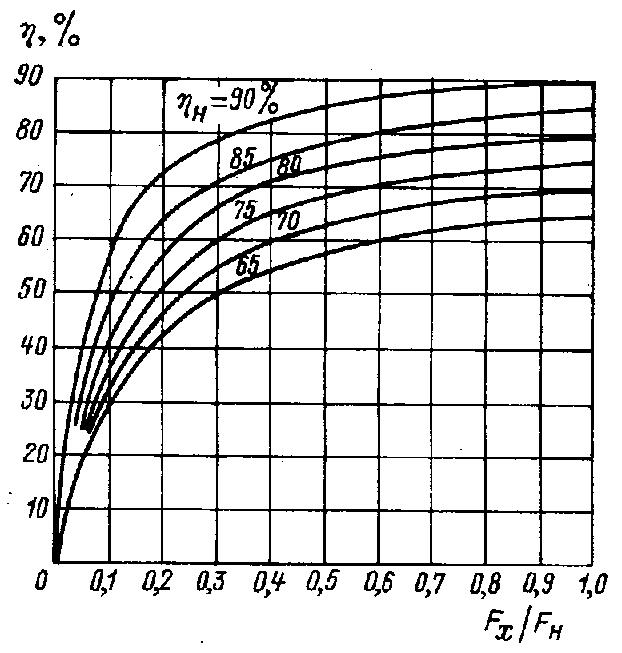
Рис. 2.11.
Зависимость КПД механизма от загрузки:
Fх
– действительная и Fн
– номинальная загрузка механизма
![]() ,
где
,
где
![]() - кпд механической передачи при холостом
ходе, определяется по кривым рис.
2.11
- кпд механической передачи при холостом
ходе, определяется по кривым рис.
2.11
2). Вращающий момент (Нм) на валу электродвигателя при разгоне гака так же, как и при подъеме груза:
М3Р = (2 3) МН.
3). Динамический момент (Нм) в период разгона гака
М3ДИН = М3Р - М3СТ
По
характеристикам выбранного электродвигателя
(см. рис.
2.1)
определяем скорость вращения
электродвигателя, соответствующую
моменту на валу при подъеме холостого
гака,
![]() ;
по графику определяем
;
по графику определяем
![]() ;
;
![]() ,
(рад/с)
,
(рад/с)
4).
Время разгона (с)
![]() .
.
Остановка холостого гака при подъеме производится при отключенном электродвигателе за счет тормозящего действия от постоянных потерь в двигателе и механической передаче, работы механического тормоза и противодействующего момента, создаваемого силой тяжести гака.
5). Примем время,
необходимое для остановки холостого
гака,
![]() (с),
тогда суммарный тормозной момент (Нм)
(с),
тогда суммарный тормозной момент (Нм)
![]()
6). Скорость (м/с) подъема холостого гака при 3
![]()
7). Путь (м), пройденный холостым гаком за время его разгона и остановки
![]()
8). Время (с) установившегося движения при подъеме холостого гака
![]()
ПЕРИОД 4. Силовой спуск холостого гака.
1). Статический момент (Нм) сопротивления при силовом спуске холостого гака
![]()
2). Вращающий момент (Нм) электродвигателя при разгоне холостого гака на спуске принимается равным 2МНОМ, т.е. М4Р = 2МНОМ
3). Динамический момент в период разгона
М4ДИН = М4Р М4СТ , Нм
4). Скорость вращения
электродвигателя в конце разгона при
установившейся скорости спуска холостого
гака находим по характеристическим
кривым (рис. 1) для статического момента
сопротивления
![]() ;
по графику находим
;
по графику находим
![]() ;
;
![]() ,
рад/с.
,
рад/с.
5). Время разгона
![]() ,
с
,
с
6). Остановку
холостого гака при спуске принимаем
аналогично остановке его при подъеме,
т.е.
![]() (с),
тогда М4Т
= М3Т,
Нм.
(с),
тогда М4Т
= М3Т,
Нм.
7). Скорость спуска
холостого гака практически будет равна
скорости его подъема, т.е.
![]() ,
м/с.
,
м/с.
8). Путь (м), пройденный холостым гаком за время его разгона и остановки
![]()
9). Время (с)
установившегося движения при спуске
гака
![]() .
.
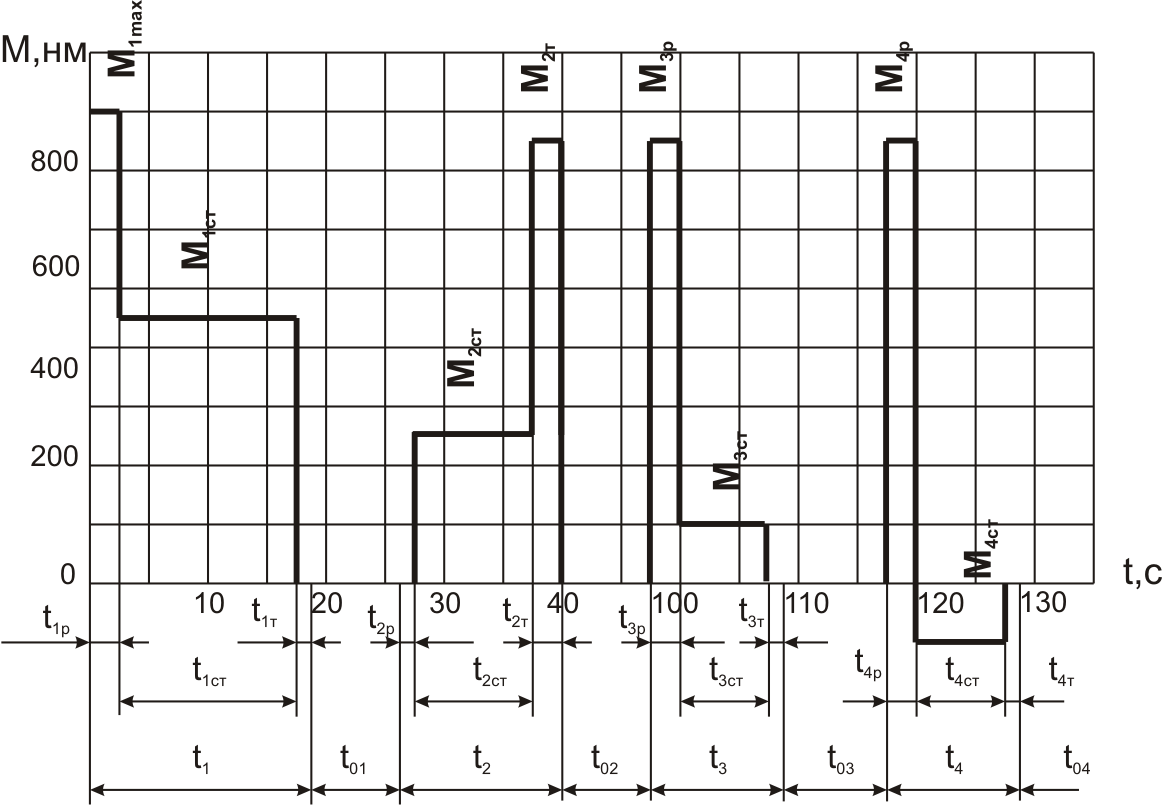
Принимая время погрузки и разгрузки по 60с, а время поворота стрелы за 10с, строим нагрузочную диаграмму лебедки (см. рис. 2.12)
ПРОВЕРЯЕМ ВЫБРАННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПО ЗАДАННОМУ РЕЖИМУ
1). Продолжительность одного цикла работы лебедки
![]() ,
С
,
С
2). Действительная
продолжительность включения
электродвигателя
![]() ,
%, где
,
%, где
![]() ,
с
,
с
3). Среднеквадратичный
(эквивалентный) момент (Нм) электродвигателя
 ,
где
,
где
![]() ;
;
![]()
Для нормальной
работы электродвигателя без перегревания
необходимо, чтобы
![]() .
Если двигатель удовлетворяет этому
условию, расчет заканчивается.
.
Если двигатель удовлетворяет этому
условию, расчет заканчивается.
|
Рис. 2.12. Диаграмма моментов за один цикл работы грузовой лебедки: t1 – время подъема гака с грузом, t01 – время поворота стрелы с грузом, t2 – время тормозного спуска груза, t02 – время разгрузки, t3 – время подъема холостого гака, t03 – время поворота стрелы без груза, t4 – время силового спуска холостого гака, t04 – время погрузки, пример
|
ПРИМЕР 2.3. Рассчитать мощность электродвигателя судовой грузовой лебедки.
Исходные данные
1 |
Грузоподъемность |
Q |
3 |
т |
2 |
Вес гака и стропов |
Q0 |
60 |
кг |
3 |
Скорость подъема и спуска грузов |
1 |
0,6 |
м/с |
4 |
Скорость подъема и спуска гака |
u0 |
1 |
м/с |
5 |
Высота подъема груза из трюма |
Н1 |
10 |
м |
6 |
Высота спускания груза |
Н2 |
6,5 |
м |
7 |
Передаточное число редуктора |
i |
21 |
|
8 |
КПД механических передач |
М |
0,75 |
|
9 |
Радиус барабана лебедки |
RБ |
0,225 |
м |
10 |
Напряжение судовой сети |
U |
220 |
В |
Усилие
подъема
![]()
Сила
тяжести
![]()
Дополнительные условия:
торможение при остановке механическое;
опускание груза производится под действием силы собственного веса и гака на механическом тормозе при включенном электродвигателе;
опускание холостого гака производится работающим электродвигателем (силовой спуск).
ПРЕДВАРИТЕЛЬНЫЙ ВЫБОР МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
Выбираем мощность электродвигателя по максимальным параметрам (подъем номинального груза):
1). Вращающий момент (Нм) на валу электродвигателя – постоянный:
![]()
2). Скорость вращения (рад/с) электродвигателя при установившемся движении
![]() .
.
3). Статическая мощность (Вт) на валу электродвигателя при подъеме полного груза
![]() .
.
4). Выбираем по каталогу электродвигатель постоянного тока со смешанным возбуждением с номинальным напряжением 220В, типа МП-51, мощностью Рном = 24кВт при ПВ=25%, номинальная скорость вращения пном = 580об/мин (61рад/с), КПД =0,85, GD2 = 9,4кГм2 (J=2,35кгм2) водозащищенного исполнения. Характеристики двигателя приведены на рис. 1
5). Номинальный момент на валу выбранного электродвигателя
![]()
ПРОВЕРКА ВЫБРАННОГО ДВИГАТЕЛЯ.
ПЕРИОД 1. Подъем с грузом.
1). Вращающий момент (Нм) на валу электродвигателя в период разгона:
![]()
2). Динамический (избыточный) момент (Нм) при разгоне
![]()
3).
Приведенным момент инерции к валу
электродвигателя с учетом моментов
инерции механических передач и груза
![]() , где - коэффициент, учитывающий
механические передачи и груз, принимаем
равным 1,3.
, где - коэффициент, учитывающий
механические передачи и груз, принимаем
равным 1,3.
4). Время разгона (с) электродвигателя:
![]() .
.
Остановка поднимаемого груза происходит при выключенном электродвигателе под действием сил тяжести груза.
5). Тормозной момент (Нм), приведенный к валу электродвигателя, от силы тяжести груза,
![]() .
.
6). Потери в электродвигателе (кВт):
![]() .
.
Для двигателей средней мощности постоянный потери Рпот1, создающие дополнительный тормозной момент, принимаются равными переменным потерям Рпот2, т.е. Рпот = Рпот1 + Рпот2, где Рпот1 = Рпот2 = Рпот / 2 = 2,12 кВт.
7). Тормозной момент (Нм) в электродвигателе, вызываемый постоянными потерями,
![]() .
.
8). Время (с) остановки поднимаемого груза:
![]() .
.
9). Путь (м), пройденный грузом при его разгоне и остановке во время подъема,
![]() .
.
10). Время (с) подъема груза при установившемся режиме:
![]() .
.
ПЕРИОД 2. Тормозной спуск с грузом.
Разгон груза в начале спуска производится за счет силы его тяжести.
1). Статический момент (Нм), создаваемый силой тяжести груза при спуске и приведенный к валу электродвигателя,
![]() .
.
2).
Тормозной момент (Нм) от постоянных
потерь в электродвигателе, противодействующий
опусканию груза:
![]() .
.
3). Время разгона (с) груза при тормозном спуске с полным грузом:
![]() .
.
Остановка груза при спуске производится динамическим торможением электродвигателя, тормозной момент которого зависит от величины вводимого в цепь якоря сопротивления. Примем тормозной момент, создаваемый электродвигателем,
М2Т = 2 МН = 2 393 = 786 Нм.
4). Динамический момент (Нм) торможения М2дин = М2Т – М2ст = 786 – 214 = 572 Нм.
5).
Время остановки (с) спускаемого груза:
![]() .
.
6). Путь (м), пройденный грузом за время его разгона и остановки,
![]() .
.
7). Время (с) установившегося движения груза при тормозном спуске последнего
![]()
ПЕРИОД 3. Подъем холостого гака.
1). Статический момент (Нм) сопротивления при подъеме гака, приведенный к валу электродвигателя,
![]() ,
,
где
![]() - КПД механической передачи при холостом
ходе, определяется по кривым рис. 2
- КПД механической передачи при холостом
ходе, определяется по кривым рис. 2
2).
Вращающий момент (Нм) на валу электродвигателя
при разгоне гака так же, как и при подъеме
груза:
![]()
3). Динамический момент (Нм) в период разгона гака
М3дин = М3Р – М3ст = 786 – 90 = 696 Нм.
По
характеристикам выбранного электродвигателя
(см. рис. 1) определяем скорость вращения
электродвигателя, соответствующую
моменту на валу при подъеме холостого
гака,
![]() ,
,
![]() ;
по графику определяем
;
по графику определяем
![]() ;
тогда
;
тогда
![]() ,
(рад/с)
,
(рад/с)
4).
Время разгона (с)
![]() .
.
Остановка холостого гака при подъеме производится при отключенном электродвигателе за счет тормозящего действия от постоянных потерь в двигателе и механической передаче, работы механического тормоза и противодействующего момента, создаваемого силой тяжести гака.
5). Примем время, необходимое для остановки холостого гака, (с), тогда суммарный тормозной момент (Нм)
![]()
6). Скорость (м/с) подъема холостого гака при 3
![]()
7). Путь (м), пройденный холостым гаком за время его разгона и остановки
![]()
8). Время (с) установившегося движения при подъеме холостого гака
![]()
ПЕРИОД 4. Силовой спуск холостого гака.
1). Статический момент (Нм) сопротивления при силовом спуске холостого гака
![]()
2). Вращающий момент (Нм) электродвигателя при разгоне холостого гака на спуске принимается равным 2МНОМ, т.е. М4Р = 2МНОМ = 2 393 = 786 Нм
3). Динамический момент в период разгона
М4ДИН = М4Р М4СТ = 786 – (-78) = 864 Нм
4).
Скорость вращения электродвигателя в
конце разгона при установившейся
скорости спуска холостого гака находим
по характеристическим кривым (рис. 1)
для статического момента сопротивления
![]() ,
,
![]() ;
по графику находим
;
по графику находим
![]() ;
;
![]()
5).
Время разгона
![]()
6). Остановку холостого гака при спуске принимаем аналогично остановке его при подъеме, т.е. (с), тогда М4Т = М3Т = 238 Нм.
7). Скорость спуска холостого гака практически будет равна скорости его подъема, т.е.
![]()
8). Путь (м), пройденный холостым гаком за время его разгона и остановки
![]()
9). Время (с) установившегося движения при спуске гака
![]() .
.
Принимая время погрузки и разгрузки по 60с, а время поворота стрелы за 10с, строим нагрузочную диаграмму лебедки
ПРОВЕРЯЕМ ВЫБРАННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПО ЗАДАННОМУ РЕЖИМУ
1). Продолжительность одного цикла работы лебедки
![]()
2). Действительная продолжительность включения электродвигателя
![]() ,
,
где
![]() с
с
3). Среднеквадратичный (эквивалентный) момент (Нм) электродвигателя
 ,
где
,
где


Коэффициенты 0,75 и 0,5 в знаменателе подкоренного выражения учитывают ухудшение условий охлаждения электродвигателя при разгоне и торможении (0,75) и остановке (0,5), когда навешенный на вал двигателя вентилятор вращается с меньшей скоростью и не подает необходимого количества охлаждающего воздуха на обмотки машины. Для электродвигателей с независимым охлаждением от вентилятора, приводимого вспомогательным электродвигателем, указанные коэффициенты вводить в формулу не следует.
Учитывая, что при опускании груза и торможении холостого гака, электродвигатель отключается от сети, в числителе подкоренного выражения члены
![]()
должны быть исключены, так как эти операции выполняются механическим тормозом.
Номинальный
момент выбранного электродвигателя
более чем в два раза превышает полученный
расчетом эквивалентный момент:
![]() ,
что при соответствии принятой и расчетной
продолжительности включения ПВ
свидетельствует о необходимости выбрать
электродвигатель меньшей мощности.
,
что при соответствии принятой и расчетной
продолжительности включения ПВ
свидетельствует о необходимости выбрать
электродвигатель меньшей мощности.
Ближайшим по каталогу является электродвигатель типа МП-42 смешанного возбуждения, мощностью 16 кВт, 700 об/мин (73,5 рад/сек), ПВ = 25%, напряжением 220 В постоянного тока.
1.
Номинальный момент нового электродвигателя
![]() ,
что больше эквивалентного момента.
,
что больше эквивалентного момента.
2.
Максимальный, момент электродвигателя
следует уточнить по каталогу, но даже
при его значении
![]() он
будет больше максимального момента,
необходимого для подъема груза.
Максимальный момент электродвигателя
влияет на время разгона и остановки
электропривода, поэтому после уточнения
его величины по каталогу необходимо
произвести повторный расчет для
определения времени переходных процессов
электропривода лебедки и корректировки
действительного ПВ механизма.
он
будет больше максимального момента,
необходимого для подъема груза.
Максимальный момент электродвигателя
влияет на время разгона и остановки
электропривода, поэтому после уточнения
его величины по каталогу необходимо
произвести повторный расчет для
определения времени переходных процессов
электропривода лебедки и корректировки
действительного ПВ механизма.
3. Несоответствие скорости вращения электродвигателя требуемой скорости вращения механизма может быть устранено путем изменения передаточного числа редуктора или включением в цепь якоря электродвигателя постоянного сопротивления, либо, наконец, незначительной корректировкой задания на проектирование.
4. После уточнения мощности электродвигателя следует определить число пусковых ступеней и величину их сопротивлений.
5. Зная мощность электродвигателя и число пусковых ступеней, выбирают контроллер или командоконтроллер с магнитным контроллером. Кулачковые контроллеры применяют для судовых лебедок, мощность электродвигателей которых не превышает 10 — 15 кВт. Для более мощных электродвигателей применяют магнитные контроллеры с управлением при помощи командоконтроллеров.