

8.1. Расчет настроек регуляторов для системы управления
Поскольку объект по каналам регулирования характеризуется малым запаздыванием и является устойчивым, то целесообразно использовать ПИ- алгоритм регулирования по каналам U2 – Cb и U - V.
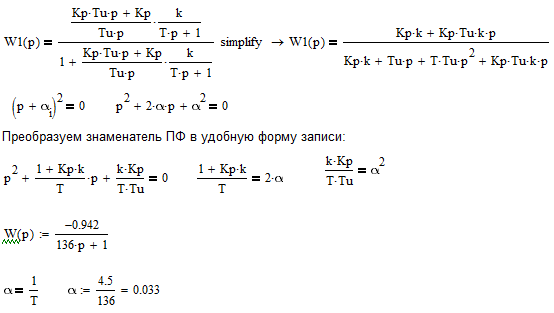
Расчёт настроек регуляторов будем проводить по полученным передаточным функциям по каналам, используя линейный типовой метод расчета, основанный на биномиальных формах Баттеворта.
Все расчеты произведены с использованием математического пакета Mathcad.
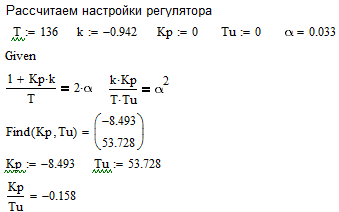
Канал U2 – Cb:
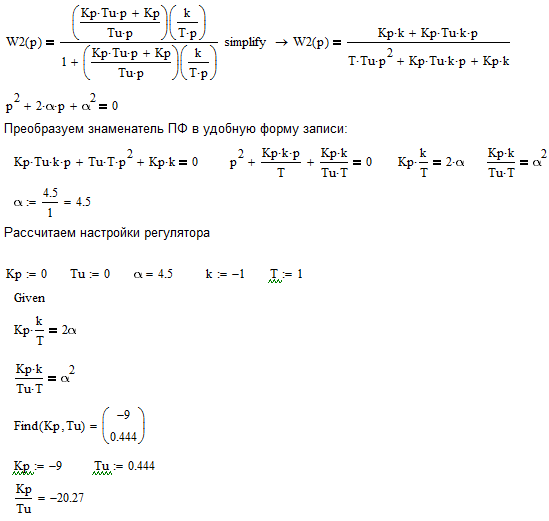
Канал U - V:
Составим схему реактора в MATLAB с использованием ПИ регуляторов по данным каналам:
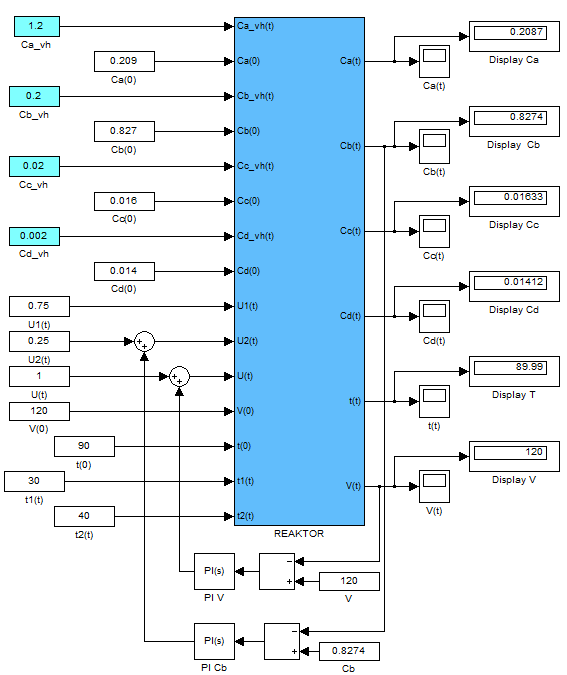
Рис. 8.1.1. Схема реактора с регуляторами
При подаче входных сигналов регулятор выводит нашу систему на необходимый уровень.
8.2. Расчет передаточных функций компенсаторов
Объект регулирования с двумя выходными и двумя входными переменными имеет вид:
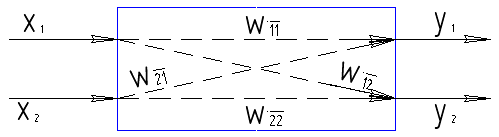
Рис. 10.1. Объект регулирования
Передаточные функции компенсаторов можно рассчитать по следующим формулам:

Составим схему реактора в MATLAB с использованием ПИ-регуляторов и компенсаторов по данным каналам:
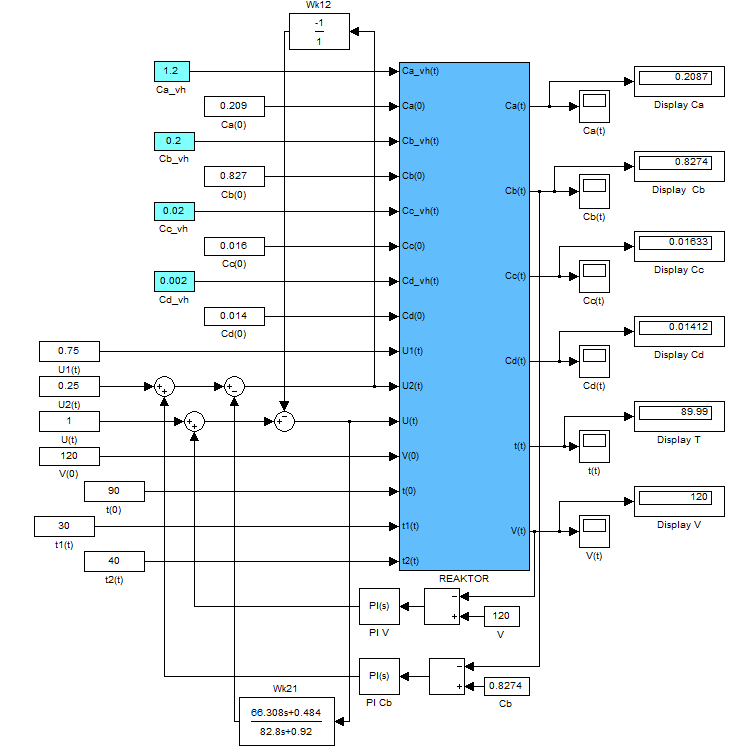
рис. 8.2.1 Схема реактора в MATLAB с использованием ПИ-регуляторов и компенсаторов
9. Показатели качества регулирования
Задача синтеза системы автоматического регулирования, начинается с синтеза структурной системы. Если ставить задачу проектирования замкнутой САР, то структура системы уже задана тем, что выбрана замкнутая система. В этом случае говорят о синтезе системы регулирования при заданной структуре. Задача становится более узкой и ее можно сформулировать так: по заданным характеристикам объекта необходимо выбрать такой алгоритм регулирования (выбрать регулятор), чтобы система регулирования была прежде всего устойчива и далее удовлетворяла более жестким требованиям, которые носят название критериев качества регулирования. Критерии качества в какой-то степени связаны с обеспечением запаса устойчивости системы.
В данной работе при сравнении работы различных систем управления в качестве основных критериев качества берутся время регулирования, степень затухания переходного процесса и величина перерегулирования при воздействии двух типовых воздействий: импульса и единичной ступеньки.
Время
регулирования
 - минимальное время, по истечению которого
регулируемая величина будет оставаться
близкой к установившемуся значению с
заданной точностью
- минимальное время, по истечению которого
регулируемая величина будет оставаться
близкой к установившемуся значению с
заданной точностью
 при
при

или
 при
,
при
,
где
Δ – постоянная величина, значение
которой нужно оговаривать (Δ задается
обычно в процентах от установившегося
значения выходной величины
 ).
).
Будем брать Δ = 1% от приращения входного значения.
Перерегулирование – максимальное отклонение переходной характеристики от установившегося значения выходной величины, выраженное в относительных единицах или процентах.
Допустимое значение перерегулирования в каждом конкретном случае будет подсказано опытом эксплуатации системы, обычно σ = 10÷30%, но в некоторых случаях допускают иногда и до 70%. Иногда перерегулирование недопустимо совсем.
Степень затухания переходного процесса

где
 - соответствующие амплитуды колебаний
кривой переходного процесса.
- соответствующие амплитуды колебаний
кривой переходного процесса.