

6. Выбор программных средств для моделирования
Для непосредственной эмуляции самого процесса моделирования будем использовать пакет визуального представления математических процессов MATLAB. MATLAB выполняет множество задач для поддержки научных и инженерных работ, начиная от сбора и анализа данных до разработки приложений. Среда MATLAB объединяет математические вычисления, визуализацию и мощный технический язык. Встроенные интерфейсы позволяют получить быстрый доступ и извлекать данные из внешних устройств, файлов, внешних баз данных и программ. Открытая архитектура позволяет легко использовать MATLAB и сопутствующие продукты для исследования данных и быстрого создания конкурентоспособных пользовательских инструментов.
Большую часть всей части моделирования, связанного с этой курсовой работой будем проводить в блоке Simulink.
Simulink является интерактивным инструментом для моделирования, имитации и анализа динамических систем. Он дает возможность строить графические блок-диаграммы, имитировать динамические системы, исследовать работоспособность систем и совершенствовать проекты. Simulink полностью интегрирован с MATLAB, обеспечивая немедленным доступом к широкому спектру инструментов анализа и проектирования. Эти преимущества делают Simulink наиболее популярным инструментом для проектирования систем управления и коммуникации, цифровой обработки и других приложений моделирования.
7. Проверка работоспособности модели
Рассматриваемый технологический объект представим в среде MATLAB с учетом принятых допущений и упрощений (см. рис. 7.1).
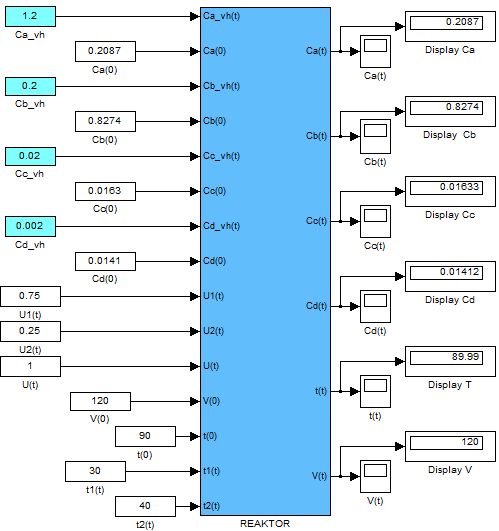
Рис. 7.1. Представление объекта управления в среде MATLAB
Представленный в среде MATLAB химический реактор имеет сложную структуру с обратными связями и межпараметрическими зависимостями. Многие блоки представляют собой объединение более «мелких» структур, входящих в их состав. Это позволяет создавать более наглядные и удобные в обращении системы моделирования.
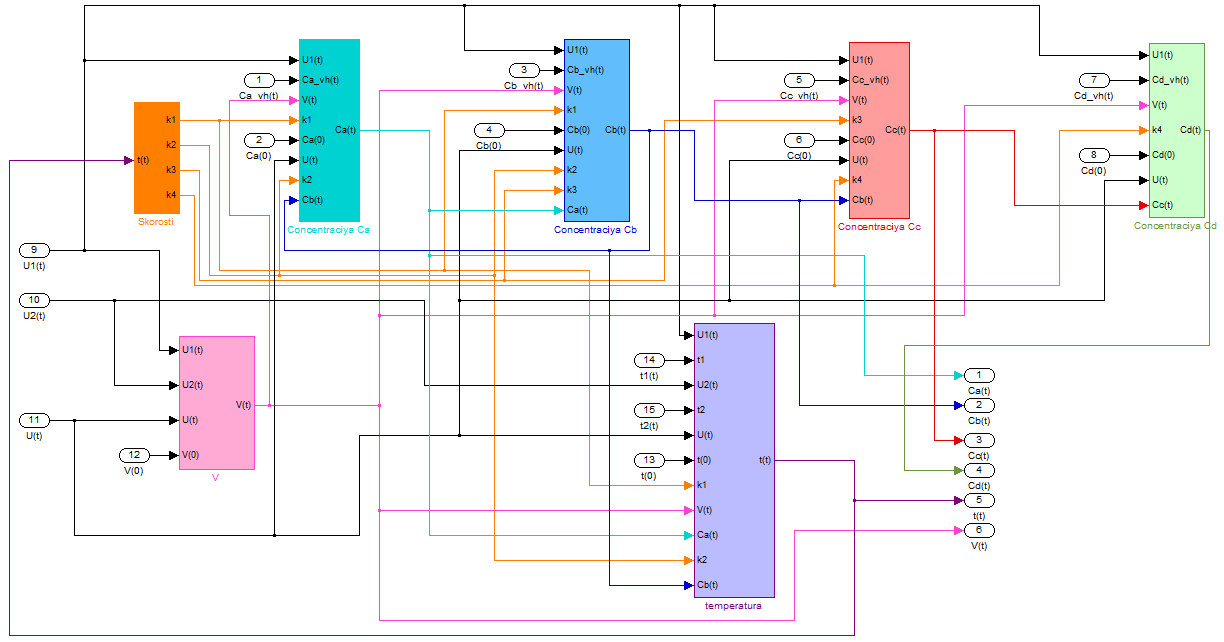
Рис. 7.2. Структура блока «Реактор»
8. Синтез систем управления двумерным объектом
При управлении многомерными объектами мы часто сталкиваемся со следующей картиной:
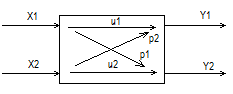
Рис. 8.1. Объект управления с двумя входными и двумя выходными переменными
Где:
X1, X2 – управляющие переменные
Y1, Y2 – управляемые переменные
U1, U2 – прямые связи
P1, P2 – перекрестные связи.
Если для выходной переменной у1 выбрать в качестве регулирующей переменной переменную х2, то за счет перекрестных каналов регулирующая переменная х2 будет оказывать влияние через передаточную функцию W21 на переменную у1, а регулирующая переменная х1 будет влиять через W12 на у2. Эти обстоятельства существенно усложняют расчет такого рода системы.
Задача расчета значительно упрощается, если на систему наложить дополнительные требования – требования автономности каналов регулирования. Автономность каналов регулирования можно осуществить за счет введения дополнительных связей между входными переменными, такого рода устройства называются компенсаторами.
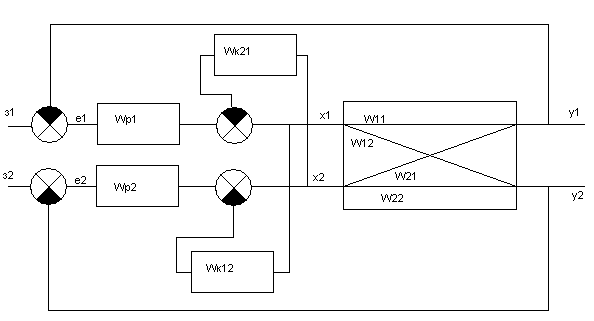
Рис. 8.2 Система управления двумерным объектом
В результате введения компенсаторов появились новые регулирующие переменные, которые влияют на исходные переменные с учетом компенсирующих воздействий.
Рассчитаем настройки регуляторов и передаточные функции компенсаторов.