

2. Механические передачи приводов
2.1. Общие сведения
Как правило, угловые скорости двигателя и рабочего органа машины не равны между собой. Согласование скоростей осуществляют с помощью передач.
Привод включает в себя двигатель и передачу (трансмиссию).
Механической передачей называют механизм, предназначенный для передачи энергии от двигателя к рабочему органу с преобразованием скорости и нагрузки.
Все механические передачи делят на две группы:
основанные на использовании трения (фрикционные и ременные);
2) основанные на использовании зацепления (зубчатые - цилиндрические
и конические, червячные, цепные, зубчатоременные, винт-гайка).
Самые распространенные - цилиндрические зубчатые передачи, к разно-видностям которых относятся планетарные, волновые и винтовые. Коническая передача с перекрещивающимися осями называется гипоидной.
По характеру установки в приводы зубчатые передачи бывают открытые (около 10%) и закрытые. Силовые червячные, планетарные, волновые, гипоидные передачи из-за конструктивных и эксплуатационных особенностей
выполняют закрытыми.

Направление вращения червячной передачи определяется по типу вращения пары винт - гайка : примеры показаны на рис.5.
Кинематические схемы приводов выполняют по ЕСКД ГОСТ 2.703-68 «Правила выполнения кинематических схем» и по ГОСТ 2.770-68 «Условное изображение элементов в схемах».
Если попытаться составить абстрактную схему привода, включающую все виды передач, то порядок размещения передач в схеме будет следующим (рис.6): двигатель - ременная передача - фрикционная передача (вариатор - на рис.6 отсутствует) - редуктор (коробка скоростей) - открытые цилиндрические передачи (1-я с наибольшим передаточным числом u, далее по порядку уменьшения u) - открытая коническая передача - цепная передача - винт-гайка.
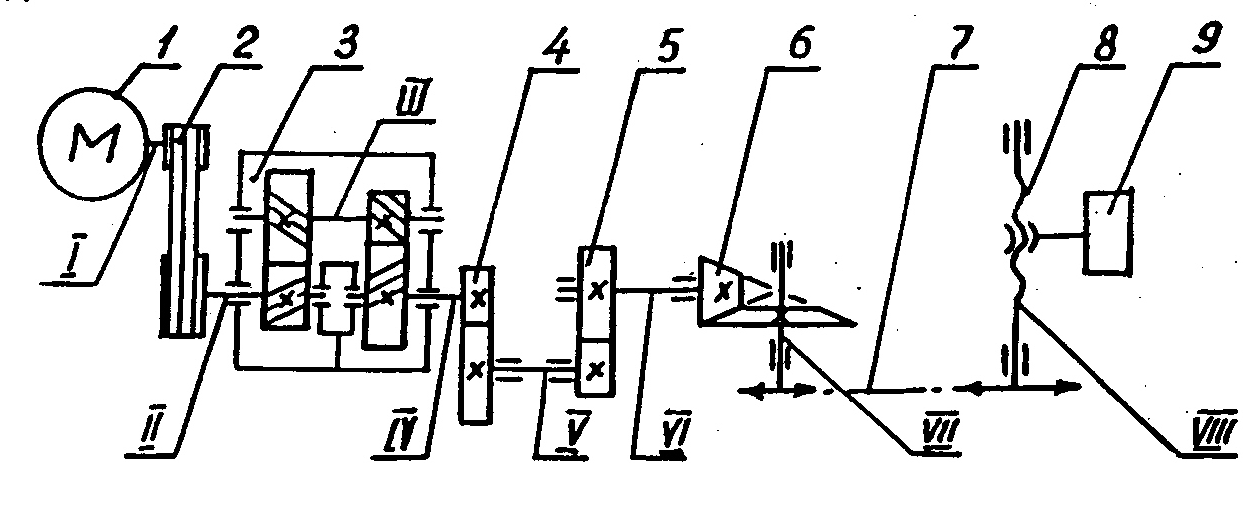
Рис.6. Пример кинематической схемы привода:
1 - электродвигатель; 2 - клиноременная передача; 3 - редуктор цилиндрический, двухступенчатый, соосный (Ц2С); 4 - открытая зубчатая цилиндрическая передача (например, u = 5); 5 - открытая зубчатая цилиндрическая передача (например, u = 2,8); 6 - открытая зубчатая коническая передача; 7 - цепная передача; 8 - передача винт-гайка; 9 - рабочий орган машины
Передача, расположенная между двумя соседними валами, называется одной ступенью привода.
Конкретный состав передач в приводе зависит в основном от двух критериев:
от общего передаточного числа привода u0 ;
от компоновки привода, т.е. от объема заданного пространства, в
котором должен размещаться привод.
2.2. Характеристика передач привода
Основные характеристики:
1). нагрузка на рабочем органе - сила Fр.о (Н), или вращающий момент Tр.о (Н.м), или мощность Рр.о (кВт) - и характер (циклограмма) ее изменения в течение цикла;
скорость рабочего органа - угловая р.о (с-1), или частота вращения nр.о (мин-1), или линейная скорость vр.о (м/с);
долговечность - в частности, срок службы: h в годах или Lh в часах.
Эти три характеристики минимально необходимы и достаточны для проектировочного расчета любой передачи. Кроме основных, важное значение имеют следующие дополнительные характеристики:
общее передаточное число привода u0 = дв /р.о = nдв /nр.о ,
где, дв, nдв - угловая скорость и частота вращения вала двигателя:
общий КПД привода: 0 = 12... i, где i - КПД одной i-ой кинематической пары (см. табл.1).
Таблица 1. Значения КПД передач с учетом потерь в опорах на подшипниках качения
Тип передачи |
Закрытая в масляной ванне |
Открытая |
Зубчатая передача: с цилиндрическими колесами |
0,96. . .0.98 |
0.92. . .0.94 |
с коническими колесами |
0,95. . .0.97 |
0,91. . .0,93 |
Червячная передача при: однозаходном червяке (u > 30) |
0,7. . .0, 8 |
--- |
двухзаходном червяке (u = 14...30) |
0,75. . .0,85 |
--- |
четырехзаходном червяке (u = 7,1...14) |
0,8. . .0,9 |
|
Планетарная передача: схема 2К-Н, однорядная |
0,98 |
--- |
схема 2К-Н, с двухрядными сателлитами |
0,96 |
--- |
схема 3К |
0,85. . .0,95 |
--- |
Волновая передача |
0,8. . .0,9 |
--- |
Ременная передача |
--- |
0,94. . .0,96 |
Цепная передача |
0,94. . .0,96 |
0,92. . .0,95 |
Муфта соединительная |
0,98 |
--- |
Подшипники качения (одна пара) |
0,99 |
--- |
потребная (расчетная) мощность двигателя Рдв.
При заданной циклограмме нагружения (режим технологического процесса фиксирован) считают [2,c.384], что двигатель работает в кратковременном режиме с продолжительностью работы под нагрузкой 10 мин t 60 мин, при которой не происходит перегрева двигателя. При этом продолжительность остановок между блоками нагружения способствует охлаждению двигателя.
Потребная мощность определяется по формуле
Рдв = ТEnр.о / 95500, (1)
где ТЕ - постоянный эквивалентный вращающий момент: ТЕ = КЕТnom,
где Тnom - номинальный момент - наибольший из длительно действующих (число циклов N > 104...105) по циклограмме нагружения (без учета пускового момента); Тnom = Тр.о;
КЕ - коэффициент приведения заданного переменного режима нагружения к эквивалентному постоянному:
КЕ = (Тi / Tnom)2 (Lhi / Lh) , (2)
где Тi, Lhi - момент и время работы i-го блока постоянной нагрузки с цикло-
граммы нагружения:
Lh = Lhi - полный срок службы передачи:
n - число блоков нагрузки по циклограмме нагружения.
Н
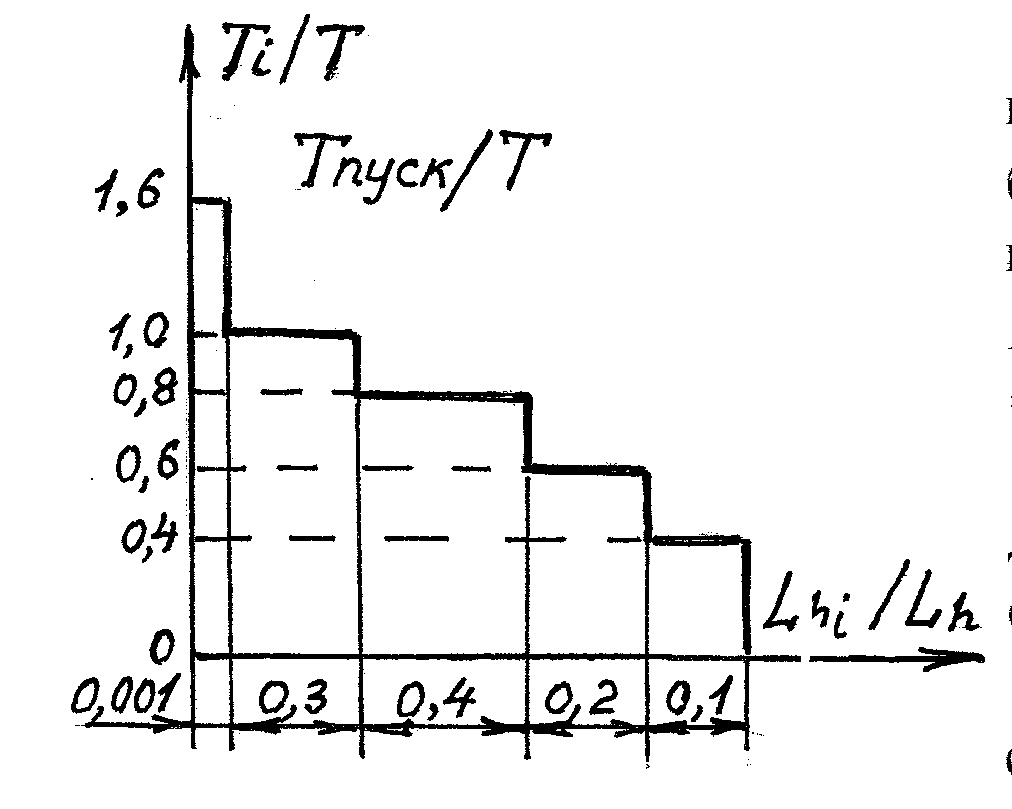
коэффициент приведения
 КЕ
=
120,3
+ 0,820,4
+ 0,620,2
+ 0,420,1
=
КЕ
=
120,3
+ 0,820,4
+ 0,620,2
+ 0,420,1
=
= 0,8.
При длительной непрерывной работе двигателя, если циклограмма нагружения отсутствует, КЕ = 1.
Момент Тр.о может быть найден по одной из формул:
Рис.7. Пример
циклограммы нагружения Тр.о = Fр.оdр.о / 2000 или
Тр.о = 9550 Рр.о / nр.о , (3)
где dр.о - диаметр рабочего органа, мм.