

КИНЕМАТ и ЭНЕРГЕТ РАСЧЕТЫ
.pdfМинистерство общего и профессионального образования Российской федерации
НИЖЕГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра ”Детали машин и ТММ”
ЭНЕРГЕТИЧЕСКИЙ И КИНЕМАТИЧЕСКИЙ РАСЧЕТЫ ПРИВОДОВ
Методические указания по дисциплине ” Детали машин ”
для студентов машиностроительных специальностей всех форм обучения
4-е издание, переработанное
Нижний Новгород
2000
Составитель А.А. Ульянов
УДК 621.81 (075.5)
Энергетический и кинематический расчеты приводов: Метод. указания по дисциплине «Детали машин» для студентов машиностроительных спец. всех форм обучения, - 4-е изд., перераб./ НГТУ; Сост.: А.А. Ульянов. - Н. Новгород,
2000. – 27 с.
Научный редактор Ю.П.Кисляков
Редактор И.И. Морозова
Подп. к печ. 27.03.2000. Формат 60х841/16. Бумага газетная.. .
Печать офсетная Печ. л. 1,75.. Уч.- изд. л. 1,4. Тираж 500 экз. Заказ 222. Нижегородский государственный технический университет. Типография НГТУ,. 603600, .Н. Новгород, ул. Минина, 24.
© Нижегородский государственный технический университет, 2000
2
1. КРАТКИЕ СВЕДЕНИЯ О ТРАНСПОРТЕРАХ
Транспортеры или конвейеры являются неотъемлемой частью современного технологического процесса, обеспечивая перемещение изделий между основным оборудованием цехов, со складов и на склады, между цехами; выполняя роль накопителей заготовок; осуществляя механизацию погрузочноразгрузочных работ и т.д.
Различают конвейеры с тяговым органом (ленточные, цепные, канатные) и без тягового органа (винтовые, роликовые, дисковые, транспортирующие трубы и др.). Самыми распространенными являются ленточные и цепные конвейеры.
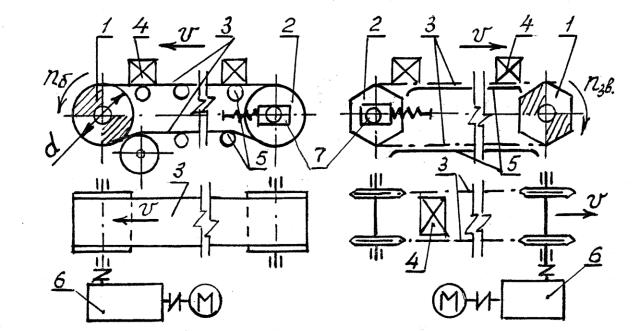
Если говорить упрощено, то ленточный конвейер (рис.1) состоит из приводного 1 и натяжного 2 барабанов, охватывающей их ленты 3 с грузом 4, поддерживающих ленту от провисания роликов 5, привода 6 и натяжного устройства 7.
Рис.1. Схема ленточного конвейера |
Рис.2. Схема цепного конвейера |
Цепной транспортер (рис.2) имеет: 1 - приводные звездочки (одну или две); 2 - натяжные звездочки (одну или две); 3 - тяговые цепи (одну или две) с грузонесущим приспособлением; 4 - груз; 5 - устройства, поддерживающие цепи с грузом; 6 - привод; 7 - натяжное устройство.
Все составные части конвейеров монтируются на рамах.
На рис.1 и 2 рабочие ветви конвейеров - верхние; нижние ветви - холостые, образующие замкнутые контуры транспортеров.
3
Конвейеры с гибким тяговым органом «тянут» груз по принципу «на себя». Например, у ленточного конвейера (рис.1) движение груза 4 задано спра ва налево, поэтому приводной барабан 1 (рабочий орган), соединенный с приводом 6, расположен слева. На рис.2 движение цепей 3 задано слева направо, и привод 6 располагается справа.
В ленточных конвейерах нагрузка передается фрикционным способом за счет сил трения между приводным барабаном и лентой, в цепных - зацеплением цепей и зубьев приводных звездочек.
Тяговое усилие F (вращающий момент Т или мощность Р) на рабочем органе определяется расчетом сопротивлений на участках конвейера методом обхода по контуру. Допускаемая скорость движения v ленточных конвейеров до 6...8 м/с, цепных - до 1...1,5 м/с.
Подробно с транспортерами различных конструкций можно ознакомиться, например, по [1].
Не путать приводные цепи, применяемые для передачи энергии на рабочий орган в составе привода, с тяговыми цепями конвейера!
2.МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ ПРИВОДОВ
2.1.Общие сведения
Как правило, угловые скорости двигателя и рабочего органа машины не равны между собой. Согласование скоростей осуществляют с помощью передач.
Привод включает в себя двигатель и передачу (трансмиссию). Механической передачей называют механизм, предназначенный для
передачи энергии от двигателя к рабочему органу с преобразованием скорости и нагрузки.
Все механические передачи делят на две группы:
1)основанные на использовании трения (фрикционные и ременные);
2)основанные на использовании зацепления (зубчатые - цилиндрические
иконические, червячные, цепные, зубчатоременные, винт-гайка).
Самые распространенные - цилиндрические зубчатые передачи, к разновидностям которых относятся планетарные, волновые и винтовые. Коническая передача с перекрещивающимися осями называется гипоидной.
По характеру установки в приводы зубчатые передачи бывают открытые (около 10%) и закрытые. Силовые червячные, планетарные, волновые, гипоидные передачи из-за конструктивных и эксплуатационных особенностей выполняют закрытыми.
4
5
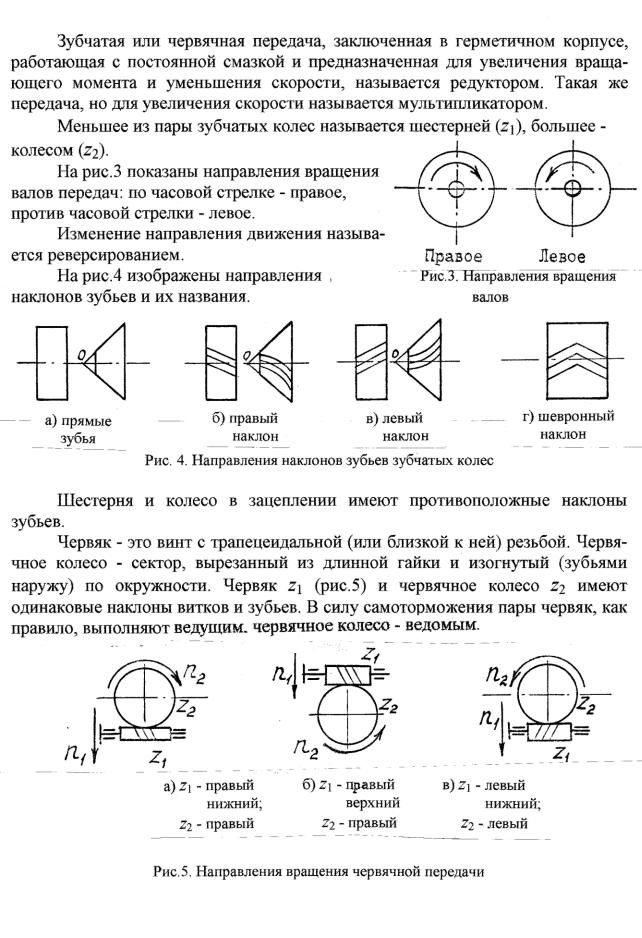
Направление вращения червячной передачи определяется по типу вращения пары винт - гайка : примеры показаны на рис.5.
Кинематические схемы приводов выполняют по ЕСКД ГОСТ 2.703-68 «Правила выполнения кинематических схем» и по ГОСТ 2.770-68 «Условное изображение элементов в схемах».
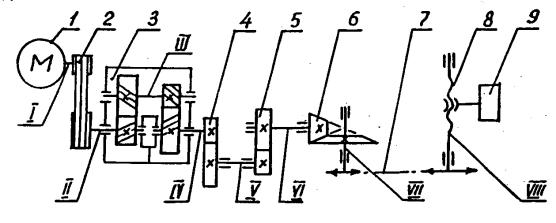
Если попытаться составить абстрактную схему привода, включающую все виды передач, то порядок размещения передач в схеме будет следующим (рис.6): двигатель - ременная передача - фрикционная передача (вариатор - на рис.6 отсутствует) - редуктор (коробка скоростей) - открытые цилиндрические передачи (1-я с наибольшим передаточным числом u, далее по порядку уменьшения u) - открытая коническая передача - цепная передача - винт-гайка.
Рис.6. Пример кинематической схемы привода:
1 - электродвигатель; 2 |
- клиноременная передача; 3 - |
редуктор цилиндрический, |
двухступенчатый, соосный |
(Ц2С); 4 - открытая зубчатая |
цилиндрическая передача |
(например, u = 5); 5 - открытая зубчатая цилиндрическая передача (например, u = 2,8); 6 - открытая зубчатая коническая передача; 7 - цепная передача; 8 - передача винт-гайка; 9 - рабочий орган машины
Передача, расположенная между двумя соседними валами, называется одной ступенью привода.
Конкретный состав передач в приводе зависит в основном от двух критериев:
1)от общего передаточного числа привода u0 ;
2)от компоновки привода, т.е. от объема заданного пространства, в котором должен размещаться привод.
2.2. Характеристика передач привода
Основные характеристики:
1). нагрузка на рабочем органе - сила Fр.о (Н), или вращающий момент Tр.о (Н.м), или мощность Рр.о (кВт) - и характер (циклограмма) ее изменения в течение цикла;
6
2) скорость рабочего органа - угловая р.о (с-1), или частота вращения nр.о (мин-1), или линейная скорость vр.о (м/с);
3) долговечность - в частности, срок службы: h в годах или Lh в часах. Эти три характеристики минимально необходимы и достаточны для
проектировочного расчета любой передачи. Кроме основных, важное значение имеют следующие дополнительные характеристики:
1) общее передаточное число привода u0 = дв / р.о = nдв /nр.о , где, дв, nдв - угловая скорость и частота вращения вала двигателя:
2)общий КПД привода: 0 = 1 2... i, где i - КПД одной i-ой кинематической пары (см. табл.1).
Таблица 1. Значения КПД передач с учетом потерь в опорах на подшипниках качения
Тип передачи |
Закрытая в |
Открытая |
|
масляной ванне |
|
Зубчатая передача: |
|
|
с цилиндрическими колесами |
0,96. . .0.98 |
0.92. . .0.94 |
с коническими колесами |
0,95. . .0.97 |
0,91. . .0,93 |
Червячная передача при: |
|
|
однозаходном червяке (u > 30) |
0,7. . .0, 8 |
--- |
двухзаходном червяке (u = 14...30) |
0,75. . .0,85 |
--- |
четырехзаходном червяке (u = 7,1...14) |
0,8. . .0,9 |
|
Планетарная передача: |
|
|
схема 2К-Н, однорядная |
0,98 |
--- |
схема 2К-Н, с двухрядными сателлитами |
0,96 |
--- |
схема 3К |
0,85. . .0,95 |
--- |
Волновая передача |
0,8. . .0,9 |
--- |
Ременная передача |
--- |
0,94. . .0,96 |
Цепная передача |
0,94. . .0,96 |
0,92. . .0,95 |
Муфта соединительная |
0,98 |
--- |
Подшипники качения (одна пара) |
0,99 |
--- |
3) потребная (расчетная) мощность двигателя Р дв.
При заданной циклограмме нагружения (режим технологического процесса фиксирован) считают [2,c.384], что двигатель работает в кратковременном режиме с продолжительностью работы под нагрузкой 10 мин t 60 мин,
при которой не происходит перегрева двигателя. При этом продолжительность
остановок между блоками нагружения способствует охлаждению двигателя. |
|
Потребная мощность определяется по формуле |
|
Р дв = ТEnр.о / 9550 0, |
(1) |
где ТЕ - постоянный эквивалентный вращающий момент: ТЕ = КЕТnom,
7
где Тnom - номинальный момент - наибольший из длительно действующих (число циклов N > 104...105) по циклограмме нагружения (без учета пускового
момента); Тnom = Тр.о;
КЕ - коэффициент приведения заданного переменного режима нагружения к эквивалентному постоянному:
K E |
Ti |
2 Lhi |
, |
(2) |
|
Tnom |
|
Lh |
|||
|
|
|
|
||
где Тi, Lhi - момент и время работы i-го блока постоянной нагрузки с циклограммы нагружения:
Lh = Lhi - полный срок службы передачи:
n - число блоков нагрузки по циклограмме нагружения.
|
Например, для заданной на рис.7 |
|||
|
циклограммы нагружения Тnom = Т, число |
|||
|
блоков n = 4, |
|
|
|
|
коэффициент приведения |
|
|
|
|
|
|
|
|
|
К = 12 0,3 + 0,82 0,4 + 0,62 |
0,2 + 0,42 0,1 = |
||
|
Е |
|
|
|
|
= 0,8. |
|
|
|
|
При длительной непрерывной работе |
|||
|
двигателя, если циклограмма нагружения |
|||
|
отсутствует, КЕ = 1. |
|
|
|
|
Момент Тр.о может быть найден по |
|||
|
одной из формул: |
|
|
|
Рис.7. Пример |
|
|
|
|
циклограммы нагружения |
Тр.о = Fр.оdр.о / 2000 |
или |
||
|
Тр.о = 9550 Рр.о / nр.о , |
(3) |
||
|
где dр.о - диаметр рабочего органа, мм. |
|||
3. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ
Для привода общего назначения в основном применяют трехфазные асинхронные электродвигатели переменного тока.
На рис.8 показана типовая характеристика такого электродвигателя; обозначено: Т - вращающий момент, развиваемый двигателем;
n - частота вращения ротора (определяется числом пар полюсов обмотки статора и нагрузкой ротора;
nc - синхронная частота вращения электромагнитного поля статора:
nдв - номинальная частота вращения ротора при номинальной нагрузке Тnom, которую может отдавать двигатель длительно, не нагреваясь свыше допустимой температуры;
8
Тпуск - пусковой момент электродвигателя;
Тmax - максимальный момент, развиваемый двигателем. В курсовом проекте следует ори-
ентироваться на обдуваемые короткозамкнутые электродвигатели серии АИР, которые имеют «жесткую» механическую характеристику, т.е. значительные изменения нагрузки вызывают несущественные изменения частоты вращения ротора. Практически при-
нимают nдв = const.
Структура обозначения двигателя:
АИ Х. Х. ХХХ. Х. Х. Х. Х. ХХ |
|
Рис.8. График зависимости частоты |
||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
, |
вращения ротора асинхронного |
|
электродвигателя от нагрузки |
||||||||||
А - асинхронный: И - унифицированная |
||||||||||
|
||||||||||
серия ( ИНТЕРЭЛЕКТРО ).
Цифры условно обозначают:
1 - привязка мощностей к установочным размерам (Р - по российскому стандарту ГОСТ 28330-89):
2 - буквы: Р - с повышенным пусковым моментом: С - с повышенным скольжением:
3 - габарит ( высота h до оси вращения: h = 50...355 мм): 4 - установочный размер по длине станины ( S, M, L ):
5 - длина сердечника статора (А, В; отсутствие буквы обозначает только первую длину);
6 - число полюсов (2, 4, 6, 8, 10 и 12);
7 - дополнительные буквы для модификации двигателя:
Б- со встроенной температурной защитой;
П- с повышенной точностью по установочным размерам; Х2 - химически стойкие; С - сельскохозяйственные;
8 - климатическое исполнение ( У, Т, ХЛ ) и категория размещения
( 1...5 ); например, У3 - умеренный климат, t0 = 250С, относительная влажность до 98%, т.е. для работы в помещении.
Пример обозначения :
«Двигатель АИР 90LB8 У3 ТУ 16-525.564-84» Двигатели выпускают с мощностями от 0,06 до 100 кВт, с nс = 3000,
1500, 1000, 750, 600 и 500 мин-1.
По конструкции корпуса различают двигатели трех исполнений:
1) IM1001 - IM1081 - на лапах;
9
2)IM2001 - IM2081 - универсальное (фланцевое и на лапах вместе);
3)IM3001 - IM3081 - фланцевое.
В табл. П1 (приложение) приведены технические данные двигателей серии АИР в диапазоне мощностей от 0,25 до 22 кВт. В табл. П2 даны отношения пускового и максимального моментов двигателей к номинальному. На рис.П1 (приложение) и в табл. П3 представлены [4,c.414] габаритные, установочные и присоединительные размеры двигателей.
Подбор двигателя из каталога производят по его номинальной мощности Рдв  Р дв, где Р дв - по формуле (1). При этом заданное по циклограмме нагружения отношение Тпуск./T не должно превышать той же характеристики
Р дв, где Р дв - по формуле (1). При этом заданное по циклограмме нагружения отношение Тпуск./T не должно превышать той же характеристики
двигателя: Тпуск /T [Тпуск / T]дв.
4. ОБЩЕЕ ПЕРЕДАТОЧНОЕ ЧИСЛО И РАЗБИВКА ЕГО ПО СТУПЕНЯМ
Общее передаточное число привода u0 = u1u2...ui, где ui - передаточное число одной i-ой ступени передач.
Для удобства запишем:
u 0 = nдв / nр.о = uредuп , |
(4) |
где uред - передаточное число редуктора;
uп - передаточное число всех прочих (кроме редуктора) передач привода. Для конвейеров nр.о (мин-1) при заданных скорости vр.о (м/c) ленты (цепи)
и диаметре барабана (звездочки) d (мм) определяется по формуле: |
|
nр.о = 6 104v / ( d) |
(5) |
Если задан шаг цепи Р (мм) и число зубьев звездочки z, то диаметр дели-
тельной окружности звездочки d можно определить как
можно определить как
d = P / sin(1800/ z). (6)
= P / sin(1800/ z). (6)
Задаваясь по рекомендациям практики (табл. 2) передаточными числами отдельных ступеней передач (uп = uп1 uп2...), находят передаточное число ре-
дуктора u ред = u 0/ uп .
Таблица 2. Передаточные числа u одной ступени
Тип |
Твердость |
Передаточные числа u |
|
передачи |
зубьев |
Наиболее |
максимальные |
|
|
употребительные |
|
1. Зубчатая цилиндрическая |
|
|
|
закрытая: |
|
|
|
тихоходная ступень (во всех |
350 НВ |
2,5. . .5 |
6,3 |
редукторах), uт: |
(40. . .50) НRCэ |
2,5. . .5 |
6.3 |
|
(56. . .63) HRCэ |
2. . .4 |
5,6 |
10