

30.Виды рабочего оборудования экскаватора и их схемы.
Универсальные одноковшовые экскаваторы могут иметь большое количество сменных ковшей различной вместимости и другого сменного рабочего оборудования.Наиболее часто используемым рабочим оборудованием универсальных экскаваторов являются прямая лопата, обратная лопата, грейфер, драглайн.
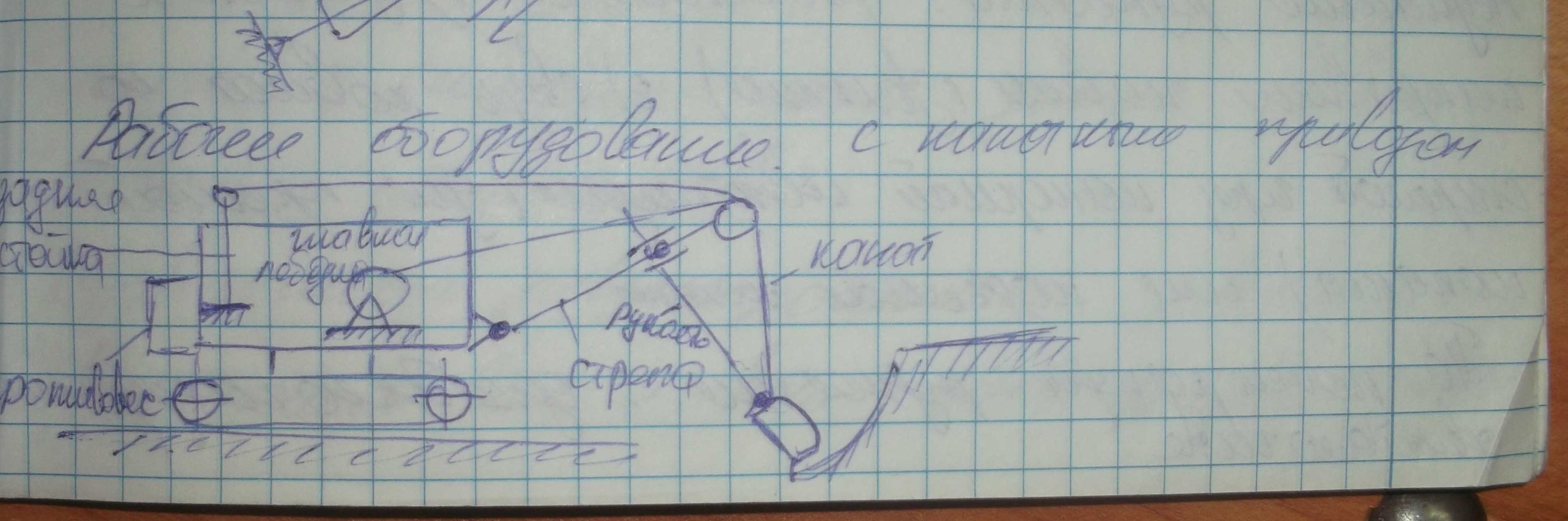
Прямая лопата с поворотным ковшом широко применяется на экскаваторах 4...6-й размерных групп и предназначена для разработки грунта как выше (преимущественно), так и ниже уровня стоянки машины, а также для погрузочных работ.
Обратная лопата является самым распространенным видом рабочего оборудования гидравлических экскаваторов и предназначена для копания выемок, расположенных ниже уровня стоянки экскаватора.
Драглайн применяется при разработке грунта ниже уровня стоянки экскаватора с выгрузкой в отвал или на транспорт. В отличие от обратной лопаты драглайн оборудуется решетчатой стрелой с ковшом совкового типа, подвешенного к ней на специальной упряжи, что обеспечивает большие радиусы копания и выгрузки и большую глубину копания..
Грейфер применяют для рытья котлованов траншей, колодцев и при погрузочно-разгрузочных работах. Особенно эффективно использование такого оборудования при копании глубоких выемок, а также в стесненных условиях.
31. Схема исполнительных механизмов экскаваторов с канатным приводом
32.Механизмы поворота одноковшового экскаватора. Схемы механизмов.
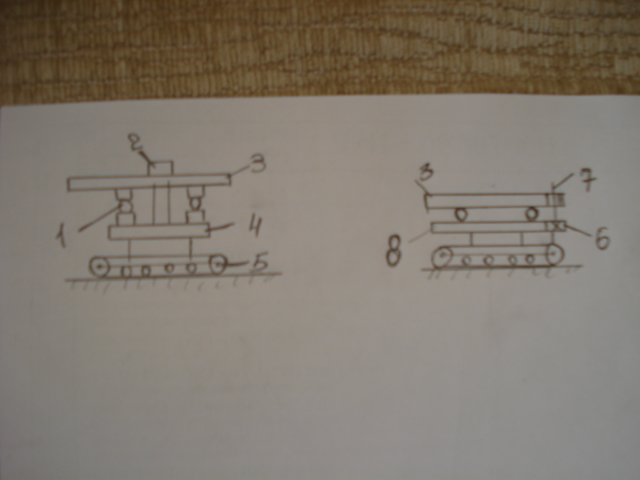
1-тело качения между верхней и нижней обоймами 2-центральная цапфа3-поворотная платформа 4-нижняя рама 5-ходовое устр-в6-приводная шестерня 7-вал привода
8-зубчатый венец
Поворотная платформа предназначена для размещения силового оборудования,
крепления стрелы и опорно-поворотных устройств. В центральной части отверстие для вала поворотного мех-ма,в хвостовой место для крепления противовеса.
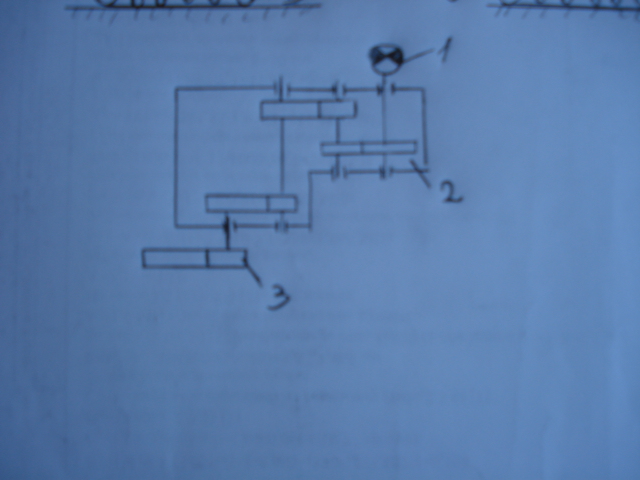
1-гидромотор 2-редуктор 3-шестерня привода
1)нагр. От платф. Передается на опорные катки через оси
2)на ролики или шарики.а)опорные катки бывают цилиндрические и конические
б)поворотные устр-ва однорядные и двурядные,в)по числу катков многокатковые и малокаковые
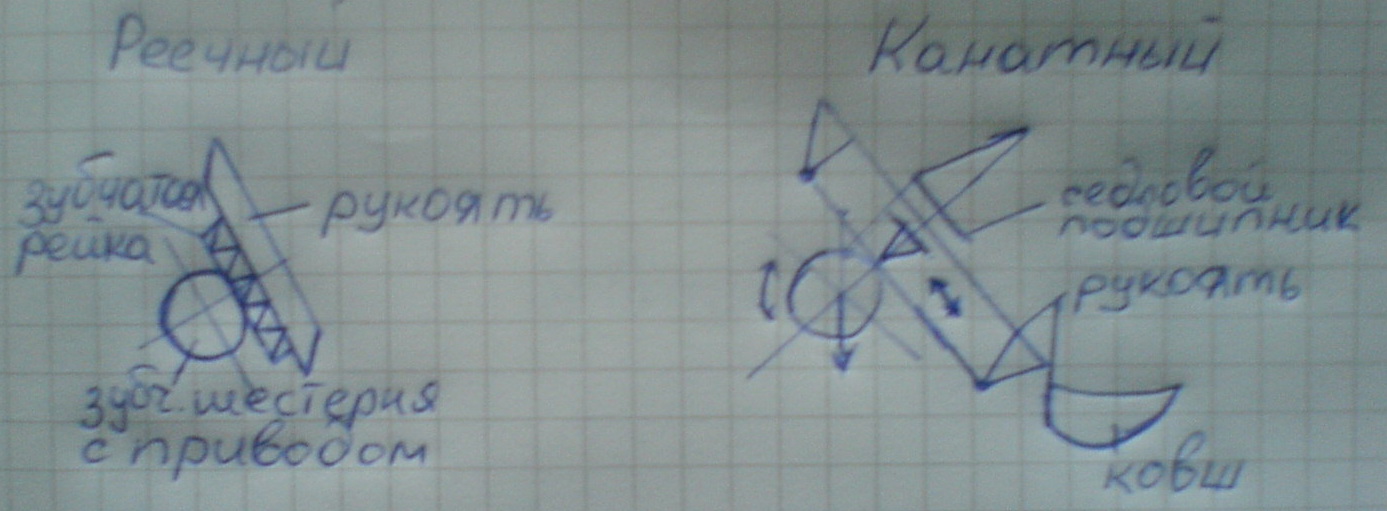
33.Напорные механизмы одноковшовых экскаваторов. Схемы.
Рукоять – необходима для обеспечения траектории движения ковша; связь ковша со стрелой и напорным механизмом(прямой лопатой ,подъемным(обратная лопата)). Различают напорные рукояти и безнапорные крепления рукояти к стреле. Напорный механизм нужен для того,чтобы создать нормальные реакции на зубьях ковша.
34.Конструктивные схемы гидравлических экскаваторов.
Эти экскаваторы представляют собой многомоторные машины с жесткой подвеской рабочего оборудования, у которых для передачи мощности от двигателя к рабочим механизмам используется гидравлический объемный привод. По сравнению с механическими гидравлические экскаваторы имеют более широкую номенклатуру сменных рабочих органов, число которых постоянно растет, большее количество основных и вспомогательных движений рабочего оборудования, что значительно расширяет их технологические возможности и обеспечивает высокий уровень механизации земляных работ, особенно в стесненных условиях.
Гидравлический привод позволяет: значительно упростить кинематику трансмиссии и рабочего оборудования; расширить номенклатуру сменного рабочего оборудования; уменьшить габариты машины; рационально совмещать рабочие операции; максимально использовать мощность силовой установки; повысить мобильность и универсальность машин и улучшить качество выполняемых работ, сообщать сменным рабочим органам движения, позволяющие выполнять земляные работы в труднодоступных местах; обеспечивать плавность движения и точную ориентацию рабочего органа; реализовать большие (в 1,5...2 раза) усилия копания; повысить производительность машин в среднем на 30...35 %; улучшить условия труда машиниста.
Различают гидравлические экскаваторы с шарнирно-рычажным и телескопическим рабочим оборудованием, для удержания и приведения в действие которого, используют жесткие связи - гидравлические цилиндры. Основными рабочими движениями шарнирно-рычажного оборудования являются изменение угла наклона стрелы, поворот рукояти с ковшом относительно стрелы и поворот ковша относительно рукояти, телескопического – выдвижение-втягивание телескопической стрелы.