25. Законы регулирования. Типы регуляторов.
П-регулятор, пропорциональный регулятор Передаточная функция П-регулятора: Wп(s) = K1. Принцип действия заключается в том, что регулятор вырабатывает управляющее воздействие на объект пропорционально величине ошибки (чем больше ошибка Е, тем больше управляющее воздействие Y).
И-регулятор, интегрирующий регулятор Передаточная функция И-регулятора: Wи(s) = К0/s. Управляющее воздействие пропорционально интегралу от ошибки.
Д-регулятор, дифференцирующий регулятор Передаточная функция Д-регулятора: Wд(s) = К2*s. Д-регулятор генерирует управляющее воздействие только при изменении регулируемой величины: Y= K2 * dE/dt. На практике данные простейшие П, И, Д регуляторы комбинируются в регуляторы вида ПИ, ПД, ПИД (см. рис.1):
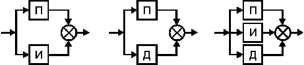
Рисунок 1 - Виды непрерывных регуляторов
В зависимости от выбранного вида регулятор может иметь пропорциональную характеристику (П), пропорционально-интегральную характеристику (ПИ), пропорционально-дифференциальную характеристику (ПД) или пропорционально-интегральную (изодромную) характеристику с воздействием по производной (ПИД-регулятор).
ПИ-регулятор, пропорционально-интегральный регулятор ПИ-регулятор представляет собой сочетание П- и И-регуляторов. Передаточная функция ПИ-регулятора: Wпи(s) = K1 + K0/s.
ПД-регулятор, пропорционально-дифференциальный регулятор ПД-регулятор представляет собой сочетание П- и Д-регуляторов. Передаточная функция ПД-регулятора: Wпд(s) = K1 + K2 s.
ПИД-регулятор, пропорционально-интегрально-дифференциальный регулятор ПИД-регулятор представляет собой сочетание П-, И- и Д-регуляторов. Передаточная функция ПИД-регулятора: Wпид(s) = K1 + K0 / s + K2 s. Наиболее часто используется ПИД-регулятор, поскольку он сочетает в себе достоинства всех трех типовых регуляторов.
26 Требования к качеству аср
Если исследуемая АСР устойчива, то может возникнуть вопрос о том, насколько качественно происходит регулирование в этой системе и удовлетворяет ли оно технологическим требованиям. На практике качество регулирования может быть определено визуально по графику переходной кривой, однако имеются точные методы, дающие конкретные числовые значения.
Показатели качества разбиты на 4 группы:
1) прямые - определяемые непосредственно по кривой переходного процесса;
2) корневые - определяемые по корням характеристического полинома;
3) частотные - по частотным характеристикам;
4) интегральные - получаемые путем интегрирования функций.
Корневые, частотные и интегральные критерии качества называют также косвенными, поскольку они в отличие от прямых определяют качество системы не непосредственно по переходной кривой, а по косвенным характеристикам (передаточным функциям, ЧХ и т.д.). В этом заключается достоинство данных критериев: они не требуют построения переходной кривой. Однако информация для косвенных критериев на практике не всегда доступна (не всегда известна, например, передаточная функция рассматриваемого объекта).
Прямые показатели качества
К ним относятся: степень затухания , перерегулирование , статическая ошибка ест, время регулирования tp и др.
Корневые показатели качества
К ним относятся: степень колебательности m, степень устойчивости и др. Корневые показатели не требуют построения переходных кривых, поскольку определяются по корням характеристического полинома. Для этого корни полинома откладываются на комплексной плоскости и по ним определяются: Степень устойчивости и Степень колебательности
Интегральные показатели качества
Интегральные показатели качества определяются путем интегрирования (суммирования) некоторых функций (переходных процессов или других показателей качества). Разновидностью интегральных показателей качества является интегральный квадратичный критерий I0