

35. Гидравлический усилитель. Усилитель с золотниковым управляющим элементом.:
Они отличаются большим коэффициентом усиления, надёж., простотой и компактностью конструкции.
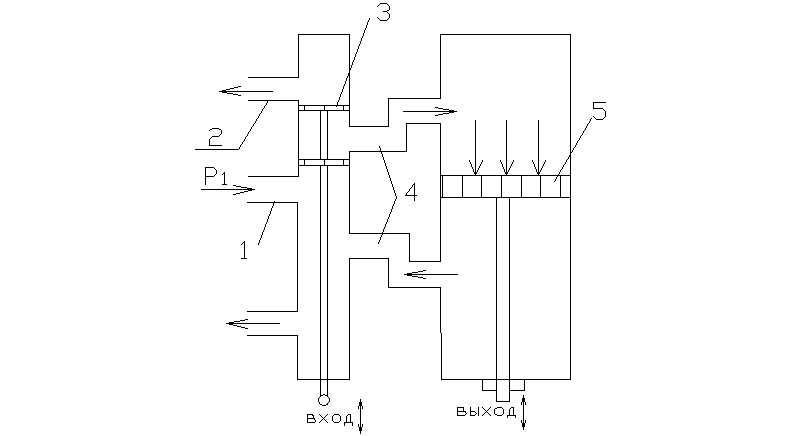
1-2 – трубки; 3 – поршень золотникового устройства; 4 – окна ; 5 – поршень рабочего механизма. Рабочая жидкость под давлением Р1 поступает в управляющий золотник через трубку 1, трубка 2 сообщается с внешней средой – через них происходит слив рабочей жидкости. При нейтрал. положении поршня золотника окна 4 перекрыты и давление жидкости в верхней и нижней камерах цилиндра 5 одинаково, если поршень 3 перемест. вверх, то верхнее окно 4 приоткроется и в верх. камеру начнёт поступать жидкость, подаваемая к золотнику под давлением Р1, в это время нижнее окно 4 окажется приоткрытым для слива жидкости из нижней камеры цилиндра. В результате этого давление в верхней и нижней камерах станет различным и на поршень механизма 5 будет действовать сила, пропорциональная разности этих давлений. То же самое произойдёт при перемещении поршня золотника вниз. В этом случае выходное усилие будет действовать в обратном направлении.
36. Гидравлический усилитель. Усилитель со струйной трубкой:
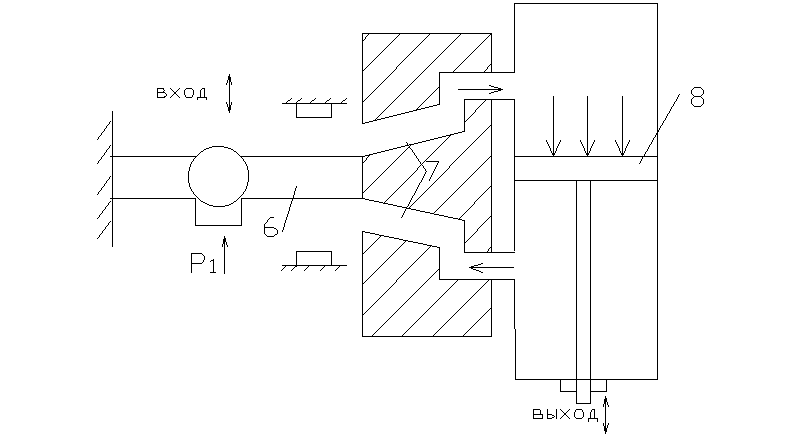
8 – поршень рабочего механизма; 7 – приёмные каналы; 6 – струйная трубка. Конец струйной трубки 6 крепится на шарнире, поэтому может легко смещаться. В трубку подаётся рабочая жидкость под давлением Р1. На небольшом расстоянии от конца струйной трубки распологается 2 приёмных капана 7; струя жидкости выходит под большим давлением из струйной трубки и подаётся в приёмные каналы. При нейтральном положении трубки давление верхней и нижней камеры цилиндра одинаково, но если под действием внешнего усилия коней струйной трубки сместится вверх, то давление в верхней камере станет больше, а в нижней меньше и на поршне будет действовать сила, пропорциональная разности этих давлений. Реагирует на малые перемещения.
37. Пневматические усилители:
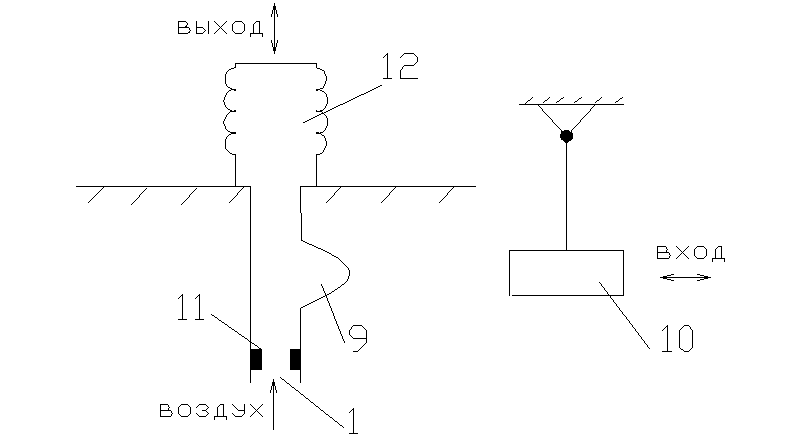
1- труба; 9- сопло; 10- заслонка; 11- дроссель; 12- исполнительное устройство. В трубку 1 нагнетается воздух через сопло 9, которое может прикрываться заслонкой, воздух выходит наружу. При изменении положения заслонки изменяется сопротивление выхода воздуха через сопло и в результате изменяется давление за дросселем 11. Подбор профиля заслонки позволяет получить лин. зависимость между положением заслонки и давлением в камере исполнительного механизма 12. Подобные усилители обладают большой чувствительностью. Недостатки: большая инерционность и необходимость иметь спец. компрессорные установки.
38. Исполнительные механизмы (им). Понятие и классификация:
ИМ в системах управления обычно называют устройства, предназначенные для перемещения рабочего органа (РО), регулирующего в соответствии с силами поступающими от управляющего устройства. РО могут быть различного рода дроссельными заслонками, клапанами, задвижками и другими регулирующими безнапорными органами, способными производить изменения кол-ва энергии или рабочего в-ва, поступающего в объект управления. При этом перемещение РО может быть поступательным или вращательным в пределах 1 или нескольких оборотов.
Конструкция и принцип действия ИМ зависят от: 1) хар-ра работы, который они должны выполнить; 2)рода используемой энергии.
По виду воздействия на состояние системы автоматизации: 1)силовые; 2) параметрические. Силовые ИМ создают на своём выходе силу или момент, который однозначно определяет положение РО. Параметрические ИМ служат для изменения параметров, характеризующих данных РО.
По виду потребляемой энергии: 1)пневматические; 2)гидравлические; 3)электрически(электродвигательные и электромагнитные).