

39.Основыне хар-ки и показатели качества работы им:
ИМ в системах управления обычно называют устройства, предназначенные для перемещения рабочего органа (РО), регулирующего в соответствии с силами поступающими от управляющего устройства.
Основными показателями качества и сравнительной оценки исполнительных механизмов является быстродействие и точность. Характер работы исполнительных механизмов зависит от: 1)номинальной нагрузки; 2)максимальной нагрузки; 3)коэффициента полезного действия; 4)зоны чувствительности. Конструкция и принцип действия ИМ зависят от: 1) хар-ра работы, который они должны выполнить; 2)рода используемой энергии.
40. Гидравлические исполнительные механизмы:
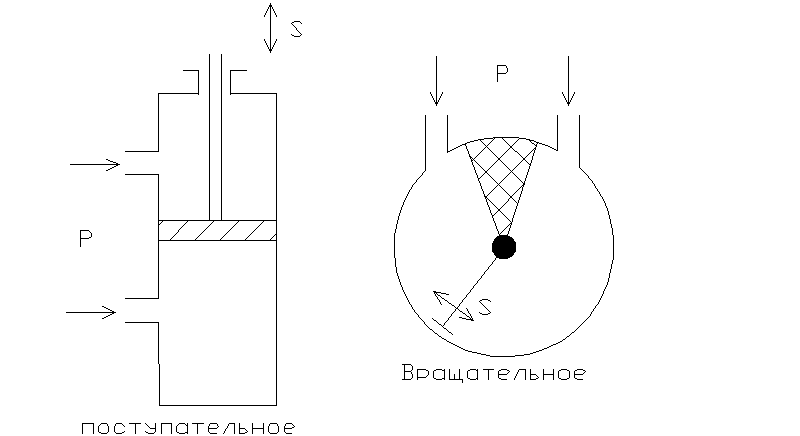
Примен. в тех случаях, когда отсутствует источник электроэнергии или требуется увеличение усилия, воздействующего на рабочий орган и уменьшение инерционности системы автоматики. Преимущества: имеют простую конструкцию, непосредственно без промежуточных редукторов преобразования энергии потока жидкости или воздуха в механич. энергию возвратнопоступательного или вращательного движения. Недостатки: потребность в гидравлических источниках питания, необходимость обеспечения герметичности системы, сравнительно сложное выполнение дистанционного управления. Гидравлич. ИМ состоит из управляющего и исполнительного элемента. Обычно первое – золотник; 2 – гидроцилиндр. Гидроцилиндр реализует поступательное или вращательное движение выходного вала.
Выходная
мощность ,
Выходное давление – 0,1-10МПа. Входная
величина – давление жидкости на поршень
Р. Если есть золотник, то –перемещение.
Выходная величина – перемещение
выходного вала S.
,
Выходное давление – 0,1-10МПа. Входная
величина – давление жидкости на поршень
Р. Если есть золотник, то –перемещение.
Выходная величина – перемещение
выходного вала S.
40. Гидравлические исполнительные механизмы.
Гидравлические
ИМ состоят из управляющего и исполнительного
эл-та. Обычно первое-золотник,
второе-гидроцилиндр. Гидроцилиндр
реализует поступат. или вращат. Движение
выходного вала. Выходная мощность
102..5*104Вт.
Выходное даление 0,1..10Мпа. Выходная
величина-давленеие жидкости на поршень
Р. Если есть золотник, то-перемещение.
Выходная-перемещение выходного вала
S.
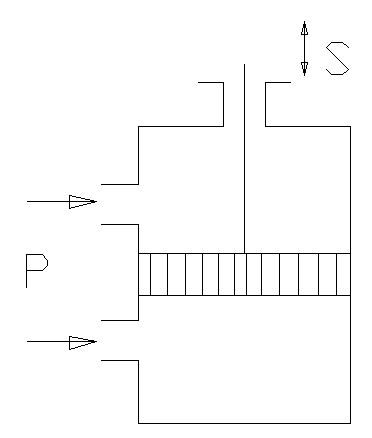
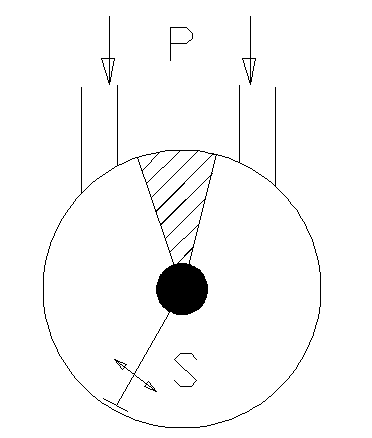
Поступ. Вращат.
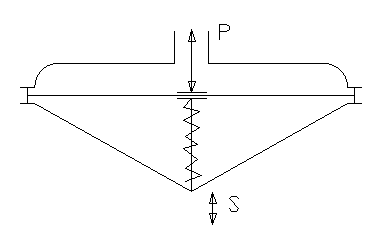
41. Пневматические исполнительные механизмы.
Входное давление 0,1..0,5Мпа.
Выходная мощь до 200Вт.
- мембранные
- поршневые
Вход. вел.-давление, выхд.-перемещение.
Выходная величина находиться в прямой завис-ти от площади мембраны и в обратной от коэф. жесткости пружины.
Мембранный пневмат. ИМ.
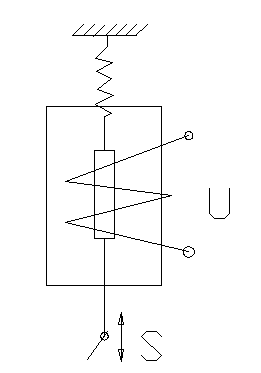
42, Электромагнитные исполнительные механизмы. Электромагниты.
К таким ИМ относятся соленоидные электроприводы, предназн.для различного рода управления регулирующими и запорными клапанами. Соленоидные ИМ –катушка, втягивающее усилие которой при подаче управляющего сигнала напряжения перемещает якорь на расстояние S преодалевая сопротивление пружины.
Вход.величина – напряжение.
Выход.величина – механич. Перемещение. Мощность до 1,4*103Вт
43. Электромагнитные исполнительные механизмы. Электромуфты.
Сюда относ.ИМ с различными видами электромагнитных муфт, кот. подразделяются на муфты: трения и скольжения.
Муфты трения состоя их 2-х полумуфт ведущей и ведомой посаженных на вал. В 1 из полумуфт распол.обмотка возбуждения и при подаче на не напряжения полумуфты сдвигаються и возник.сила трения приводит их в движение.
В муфтах скольжения момент вращения передается по средствам магнит. Поля, создаваемого обмоткой возбуждения. При ее вращении в ведомой полумуфте, как в роторе асинхронного двигателя, индуцируется ток от взаимод. кот. с магнитным полем возникает момент вращения, увлекающ. Ведомую полумуфту за ведущей.