

3. Схемы последовательной коррекции
Рассмотрим процедуру синтеза последовательного корректирующего устройства или корректирующего устройства в цепи обратной связи, как показано на рис.1 (а) и (б).
В любом случае корректирующее устройство
включается последовательно с неизменяемым
объектом W(p),
и в итоге передаточная функция контура
(разомкнутой цепи) приобретает вид
![]() .
.
Корректирующее устройство выбирается так, чтобы изменить либо вид корневого годографа, либо форму частотных характеристик. В любом случае можно подобрать такое устройство, передаточная функция которого будет иметь вид:
 (1)
(1)
Далее задача сводится к надлежащему
выбору полюсов и нулей функции
![]() .
.
Рассмотрим корректирующие устройства первого порядка.
Корректирующее устройство включают, как правило, в систему после измерительного устройства. Если система находилась в состоянии равновесия и при приложении к ней возмущения x(t) должен был получиться переходный процесс y(t), то передаточная функция системы

Рис.1. Последовательная коррекция
 или
или
Из последнего уравнения получим:
После этого следует решить задачу физической реализации передаточной функции WК(p).
При графоаналитическом методе расчета структуры САУ переходят к логарифмическим характеристикам и получают следующее выражение:
LСК (ω) = LИСХ (ω) + LК (ω) или LК (ω) = LСК (ω) - LИСХ (ω)
Порядок выполнения расчетов:
-
Строят ЛАЧХ исходной системы;
-
По заданным требованиям к качеству переходного процесса в проектируемой системе строят ЛАЧХ скорректированной системы.
-
По имеющимся ЛАЧХ характеристикам строят соответствующие ЛФЧХ и определяют запас по модулю и по фазе.
-
Вычитанием ЛАЧХ исходной системы из ЛАЧХ скорректированной системы получают ЛАЧХ корректирующего устройства.
-
По ЛАЧХ корректирующего устройства подбирают наиболее простое по техническому исполнению корректирующее устройство и его параметры. Подобрать соответствующее корректирующее устройство можно по литературным источникам.
3.1. Корректирующее устройство с опережением по фазе
Сначала параметры корректирующего устройства выбираются так, чтобы система удовлетворяла заданному ограничению на величину установившейся ошибки. После этого параметры настраиваются таким образом, чтобы изменить динамику системы в желаемом направлении, не влияя при этом на установившуюся ошибку.
Рассмотрим корректирующее устройство с передаточной функцией:
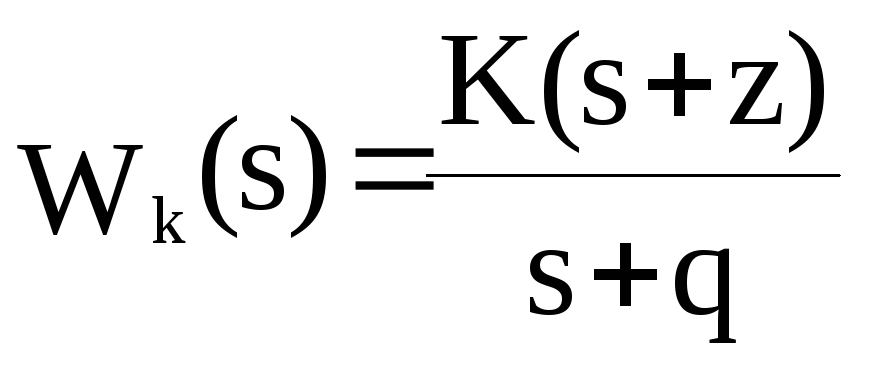 (2)
(2)
Проблема синтеза заключается в выборе параметров K, z, q, обеспечивающих заданное качество системы.
Если
![]() ,
то соответствующее устройство обладает
опережением по фазе, и относительное
расположение нуля и полюса на р –
плоскости приведено на рис.2.
,
то соответствующее устройство обладает
опережением по фазе, и относительное
расположение нуля и полюса на р –
плоскости приведено на рис.2.
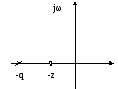
Рис.2. Расположение полюса и нуля для системы с опережением по фазе.
Если
![]() ,
а нуль находится в начале координат, то
мы имеем дело с дифференциатором.
Передаточная функция для него:
,
а нуль находится в начале координат, то
мы имеем дело с дифференциатором.
Передаточная функция для него:
 (3)
(3)
Частотная характеристика для этого корректирующего устройства имеет вид
 : (4)
: (4)
отсюда следует, что создаваемый им фазовый сдвиг равен +90о.
Частотная характеристика, соответствующая передаточной функции (2) имеет вид:
 (5)
(5)
где
Частотные характеристики такой схемы с опережением по фазе приведены на рис.3. Фазовая характеристика определяется уравнением:
![]()
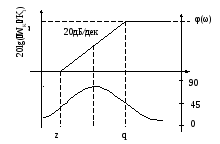
Рис.3. Диаграмма Боде для схемы с опережением по фазе
Как видно, схема обладает опережением по фазе, а наклон среднечастотной асимптоты амплитудной характеристики равен +20дБ/Дек.
Корректирующее устройство с опережением по фазе можно реализовать с помощью схемы, изображенной на рис. 4.
V1(p)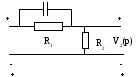
Рис.4. Четырехполюсник, обладающий опережением по фазе
Эта схема имеет передаточную функцию:
 (7)
(7)
Полагая:
 и
и
мы получим передаточную функцию с опережением по фазе:
 (8)
(8)
которая совпадает с (5) с точностью до дополнительного коэффициента К.
Фазовый сдвиг имеет максимальное
значение на частоте собственных колебаний
системы
![]() .
.
![]() -
среднее геометрическое значений
-
среднее геометрическое значений
![]() и
и
![]() .
.
Если частоту откладывать в логарифмическом масштабе, то фазовая характеристика имеет максимальное значение как раз посередине между частотами, соответствующими нулю и полюсу передаточной функции. Таким образом,
Чтобы получить выражение для максимума фазового сдвига, запишем аргумент функции в виде:
 (9)
(9)
Подставив сюда значение частоты
![]() ,
получим:
,
получим:
 (10)
(10)
Далее, используя соотношение между
тригонометрическими функциями, можно
записать: (11)
(11)
Выражение (11) очень полезно для вычисления
требуемого соотношения
![]() между полюсом и нулем корректирующего
устройства, обеспечивающего заданный
максимальный фазовый сдвиг. График
зависимости
между полюсом и нулем корректирующего
устройства, обеспечивающего заданный
максимальный фазовый сдвиг. График
зависимости
![]() от
от
![]() приведен на рис.5. Из графика, в частности,
видно, что фазовый сдвиг не может быть
больше 70о. Кроме того, поскольку
приведен на рис.5. Из графика, в частности,
видно, что фазовый сдвиг не может быть
больше 70о. Кроме того, поскольку
![]() ,
то существуют практические ограничения
на максимально достижимое значение α.
,
то существуют практические ограничения
на максимально достижимое значение α.
Поэтому, если требуется иметь максимальный сдвиг больше, чем , то в этом случае потребуется использовать две схемы, соединенные последовательно. Тогда эквивалентная передаточная функция корректирующего устройства будет равна:
![]() при условии, что эффект нагрузки со
стороны
при условии, что эффект нагрузки со
стороны
![]() на
на
![]() незначителен.
незначителен.