

Лекция 16. Синтез систем
Вопросы лекции
-
Введение
-
Подходы к синтезу систем
-
Схемы последовательной коррекции
3.1. Корректирующее устройство с опережением по фазе
3.2. Корректирующее устройство с отставанием по фазе
Пример 1
Пример 2
-
Синтез корректирующего устройства с опережением по фазе с помощью корневого годографа
Пример 3
5. Коррекция с помощью дополнительных обратных связей
1. Введение
Иногда желаемое качество системы можно обеспечить просто путем настройки параметров системы. Если этого оказывается недостаточно, то для достижения желаемого результата должна быть изменена структура системы.
Коррекция динамических свойств осуществляется с целью выполнения требований по устойчивости и качеству переходного процесса.
Осуществляется коррекция с помощью введения в САУ специальных корректирующих звеньев. Корректирующее устройство – это элемент или схема, дополнительно вводимые в систему управления с целью исправления ее динамических характеристик.
Существует три вида коррекции: последовательная, с помощью дополнительных обратных связей и смешанная.
Вопрос выбора схемы включения корректирующих устройств решают, исходя из преимуществ и недостатков, свойственных каждому из видов коррекции.
При последовательном включении корректирующих звеньев в основную цепь увеличивается скорость воздействия на систему, но и также усиливается вредное воздействие высокочастотных возмущений.
Введение интегрирующего звена в закон регулирования делает систему астатической и, следовательно, устраняет статическую ошибку. Вместе с тем для стабилизации астатических систем приходится значительно усложнять схему системы.
При включении корректирующих устройств в цепь обратной связи система менее чувствительна к внешним воздействиям и изменениям параметров основной цепи регулирования.
Корректирующие устройства могут составляться из различных по своей физической природе элементов – электрических, механических, гидравлических.
Эти звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им. Соответственно, они и называются последовательные либо параллельные корректирующие звенья. Несколько вариантов коррекции показано на рис.1.
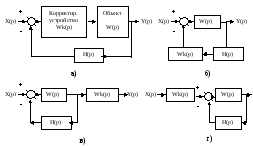
Рис.1. а – последовательная коррекция; б – корректирующее устройство в цепи обратной связи; в – коррекция по выходу или по нагрузке; г – коррекция по входу.
2. Подходы к синтезу систем
Качество системы управления может быть описано как с помощью ее временных, так и частотных характеристик.
Требования к качеству могут быть заданы, например, в виде величины максимального перерегулирования, времени максимума переходной характеристики и времени ее установления.
Кроме того, обычно необходимо знать максимально допустимую установившуюся ошибку при различных тестовых входных сигналах и внешних возмущения..
Все эти требования к качеству можно связать с желаемым расположением полюсов и нулей передаточной функции замкнутой системы WЗАМК (р).
Достаточно просто построить корневой годограф замкнутой системы при изменении какого – либо ее параметры. Однако, если корневой годограф не позволяет найти желаемое расположение корней, то в систему необходимо ввести корректирующее устройство, которое повлияет на вид корневого годографа и даст возможность, варьируя параметр системы, разместить корни в соответствии с требованиями к качеству.
Качество замкнутой системы можно оценить и по частотных характеристикам, главным образом, по максимальному значению амплитудной характеристики А(р), резонансной частоте ωr , полосе пропускания и запасу устойчивости по фазе.
Чтобы удовлетворить требования, предъявляемые к качеству системы, при необходимости в нее вводится корректирующее устройство. Синтез этого устройства можно произвести, пользуясь любой формой представления частотных характеристик – в полярных координатах, в виде диаграммы Боде.
В случае последовательной коррекции предпочтительнее использовать диаграмму Боде, так как в этом случае частотные характеристики корректирующего устройства просто складываются с соответствующими характеристиками исходной системы.
Таким образом, синтез системы предполагает изменение вида ее частотных характеристик или корневого годографа так, чтобы удовлетворить требования, предъявляемые к качеству системы.
С практической точки зрения наилучшим и наиболее простым способом улучшения качества системы является, если это возможно, изменение самого объекта управления, если проектировщик способен в процессе синтеза изменить передаточную функцию объекта управления W(p), то тем самым можно улучшить и качество системы. Например, чтобы улучшить динамику сервопривода, часто бывает достаточно выбрать двигатель с наилучшими параметрами. При проектировании системы управления самолетом разумнее сначала изменить его аэродинамические свойства так, чтобы улучшить полезные характеристики. Поэтому проектировщик систем управления должен ясно понимать, что улучшение качества системы в первую очередь связано с изменением свойств объекта управления.
Однако часто объект либо вообще невозможно изменить, либо он уже был изменен настолько, насколько возможно, но качество системы еще неудовлетворительно. Тогда остается единственная возможность – добиться желаемого качества системы за счет введения корректирующего устройства.
Дальше мы будем предполагать, что передаточная функции объекта не может быть изменена.