

22) Экстраполяция в задаче траекторной оценки и сопровождения вс
В современных АС УВД для определения параметров траектории полета ВС по данным радиолокационных измерений используется фильтр Калмана.
Уравнения дискретного фильтра Калмана, производящего в общем случае оценку вектора состояний X рекуррентным образом, имеют следующий вид:
![]()
где X(i/i -1) - прогнозируемое (экстраполированное) значение вектора состояний на i-й момент локации по данным оценки, полученной на предыдущем (i-1) - ом моменте локации; K(i) - матрица коэффициентов коррекции: Z(i) - вектор измеряемых траекторных параметров; H{i) - матрица, "вырезающая" из вектора состояний только те элементы, которые измеряются.
Прогнозирование вектора состояний производится на основании линейной модели, описывающей движение ВС в общем виде
![]()
где Ф(i/i-1) - переходная матрица; U (i-1) - вектор известных управляющих воздействий; B(i - 1) - матрица, распределяющая управляющие воздействия;
Матрица коэффициентов коррекции K(i) вычисляется согласно уравнению
![]() где
где
![]()
-прогнозируемое значение корреляционной матрицы ошибок оценки (здесь не учитываются возможные случайные возмущения процесса полета ВС,), которая затем корректируется согласно выражения
![]()
Здесь R - матрица, которая характеризует ошибки измерений и определяется из принятой для фильтра Калмана модели измерений:
![]()
где
ν
- вектор случайных
некоррелированных
ошибок измерений типа "белый шум",
подчиняющиеся нормальному закону
распределения, с нулевым математическим
ожиданием M{νi}
= 0
и с корреляционной матрицей равной
![]() где δ
i,j
- функция
Кронекера: δ
ij=1
при
i=j
,
δ
ij=0
при
i≠j.
где δ
i,j
- функция
Кронекера: δ
ij=1
при
i=j
,
δ
ij=0
при
i≠j.
23) Постановка задачи оценки параметров траектории полета самолета
Задача оценки параметров траектории движения ВС заключается не только в фильтрации ошибок измерений РЛС и получений более точной оценки местоположения ВС, по и в восстановлении остальных необходимых для процесса управления траекторных параметров, таких как скорость полета, ускорение, курс и другие, которые радиолокатором не измеряются.
Постановка
задачи оценки состояний формулируется
следующим образом. Задана управляемая
система в виде физического соотношения
между вектором состояний х,
управлением
и
и
возмущающим воздействием
![]() .
Задана
также измерительная система в виде
физических соотношений между сигналом
измерений z,
вектором
состояний
.
Задана
также измерительная система в виде
физических соотношений между сигналом
измерений z,
вектором
состояний
![]() и
ошибками измерений
и
ошибками измерений
![]() .
Заданы
статистические характеристики случайных
сигналов
.
Заданы
статистические характеристики случайных
сигналов
![]() и
и
![]() .
Требуется найти оценку состояний
.
Требуется найти оценку состояний
![]() системы
по результатам обработки результатов
измерений
системы
по результатам обработки результатов
измерений
![]() с
ииспользованием
оптимального в заданном смысле
устройства (или алгоритма) оценки,
минимизирующего ошибку оценки
с
ииспользованием
оптимального в заданном смысле
устройства (или алгоритма) оценки,
минимизирующего ошибку оценки
![]()
Оценка
![]() (t
/ Т) должна
удовлетворять определенным критериям
качества. Причем для t
= Т
оценку
называют оценкой фильтрации, для t
< Т -
оценкой сглаживания, а для t
>
Т - оценкой
прогноза.
(t
/ Т) должна
удовлетворять определенным критериям
качества. Причем для t
= Т
оценку
называют оценкой фильтрации, для t
< Т -
оценкой сглаживания, а для t
>
Т - оценкой
прогноза.
3. Точностные характеристики РЛС
Точность измерения
дальности
![]() и азимута
и азимута
![]() характеризуется величинами случайных
ошибок измерения, которые обычно считают
подчиненными нормальному закону
распределения. При этом принимается,
что ошибки измерения дальности и азимута
независимы между собой и представляют
некоррелированные последовательности
типа дискретного белого шума. Ошибки
измерения имеют систематическую и
случайную составляющие. Обычно считается,
что систематическая ошибка скомпенсирована.
характеризуется величинами случайных
ошибок измерения, которые обычно считают
подчиненными нормальному закону
распределения. При этом принимается,
что ошибки измерения дальности и азимута
независимы между собой и представляют
некоррелированные последовательности
типа дискретного белого шума. Ошибки
измерения имеют систематическую и
случайную составляющие. Обычно считается,
что систематическая ошибка скомпенсирована.
Математическое
ожидание ошибок РЛС обычно принимают
равным нулю. Математически статистические
характеристики ошибок измерения
дальности
![]() азимута
азимута
![]() записываются как
записываются как
![]() при этом
при этом

Для установленных
интервалов дальности дисперсия ошибок
измерения дальности и азимута считаются
постоянными
![]()
Ошибки измерения дальности и азимута являются аддитивными, т.е. результаты измерения, поступающие в i–й момент времени (обзоре локатора), которые обозначим * и * можно записать в виде
![]()
Связь измерений в полярной системе координат с координатами местоположения ВС в прямоугольной системе координат определяется выражениями
![]() ;
; ![]() ,
,
С учетом аддитивности ошибок измерений связь данных РЛС с прямоугольными координатами истинного местоположения ВС устанавливается соотношениями
![]() ;
; ![]() .
.
В АС УВД
обработка траекторной информации, как
правило, производится в прямоугольной
системе координат
![]() ,
поэтому прежде,
чем поступить на обработку измере ния
преобразуются из полярной системы
координат в прямоугольную:
,
поэтому прежде,
чем поступить на обработку измере ния
преобразуются из полярной системы
координат в прямоугольную:
![]()
![]()
20. КОМПЛЕКСНЫЙ АЛГОРИТМ ВТОРИЧНОЙ ОБРАБОТКИ РЛИ
Определение статуса траектории:
-
начальная точка траектории;
-
обнаруженная траектория;
-
сопровождаемая траектория;
-
потерянная траектория;
-
законченная траектория;
-
продолженная (восстановленная) траектория.

19. ЛОГИЧЕСКАЯ СХЕМА АЛГОРИТМА СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ

17. СХЕМА ОБНАРУЖЕИЯ ПАЧКИ (ВЕСОВАЯ ОБРАБОТКА)
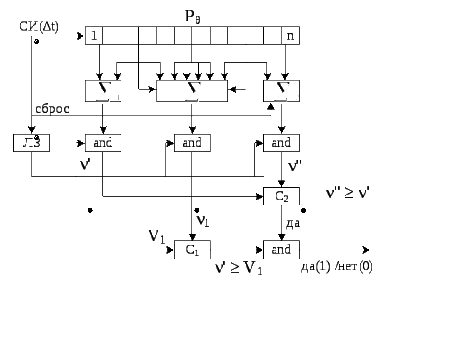
∑ - сумматоры
ЛЗ – линия задержки
С - компоратор
16. СХЕМА «СВЕРТЫВАНИЯ» РАДИОЛОКАЦИОННЫХ ОТМЕТОК

СИ – синхроимпульс
ЗИ – запускаемый импульс
Работает в момент излучения ЗИ, 1разряд регистра дальности запис.1, которая совпадает с тактовыми импульсами (ТИ(∆t’)) с периодом ∆t’ со схемой and при этом поочередно открываются. На вторые входы схем and подается квантованный сигнал от РЛК приемника, этот сигнал проходит через открытую схему and и записывается на свой регистр азимутов в І разряд. С приходом нового ЗИ цикл повторяется, но прежде СИ, поступающий с периодом ∆t продвинет вправо записанные в регистре θ единицы. На регистре θ формируется пакет по соответствующей дальности.