26. Уравнение α-β фильтра
Самолет совершает прямолинейный полет с постоянной скоростью рекуррентные выражения для так называемого α-β фильтра, полученные с использованием метода наименьших квадратов, позволяют производить оценку координаты х местоположения ВС и составляющей скорости V в i-й (текущий) момент локации и имеют следующий вид (для координаты у уравнения имеют аналогичный вид)
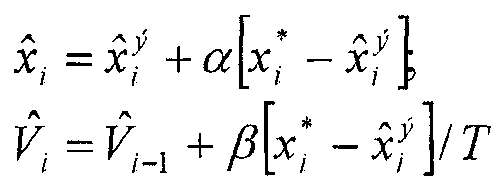
где
![]() - прогнозируемое (экстраполированное)
значение координаты на i-й
момент локации по данным оценки
координаты, полученным на предыдущем
(i-1)
- ом моменте локации (на предыдущем
периоде обзора радиолокатора); х*
- измеренное
радиолокатором значение координаты
местоположения ВС на i
- ом
периоде обзора; а,
β -коэффициенты
коррекции по координате и скорости
соответственно, которые определяются
согласно выражениям
- прогнозируемое (экстраполированное)
значение координаты на i-й
момент локации по данным оценки
координаты, полученным на предыдущем
(i-1)
- ом моменте локации (на предыдущем
периоде обзора радиолокатора); х*
- измеренное
радиолокатором значение координаты
местоположения ВС на i
- ом
периоде обзора; а,
β -коэффициенты
коррекции по координате и скорости
соответственно, которые определяются
согласно выражениям
![]()
![]()
i - число радиолокационных измерений по данной цели.
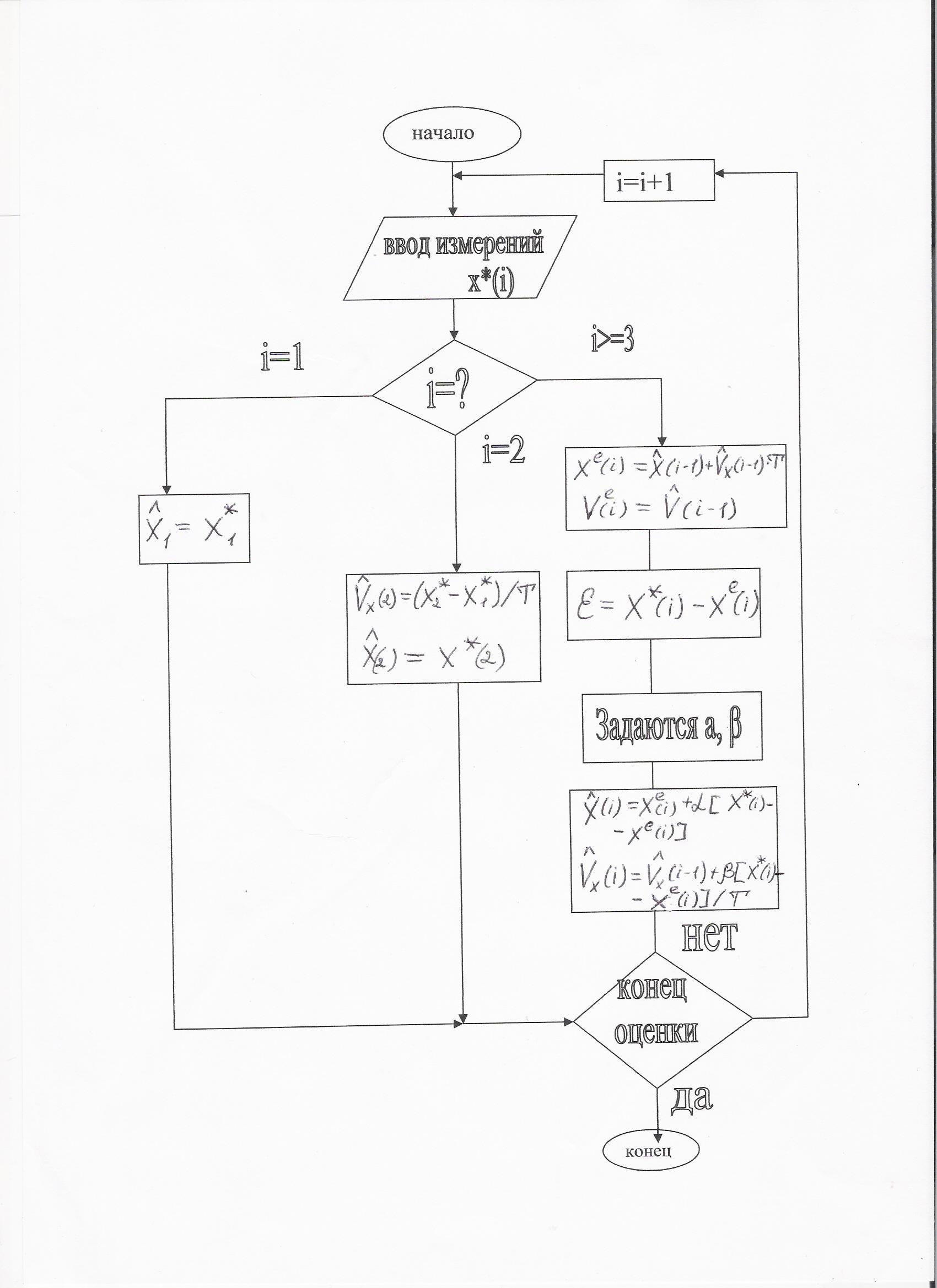
25. Схема алгоритма α-β фильтра
27. Схема α-β фильтра
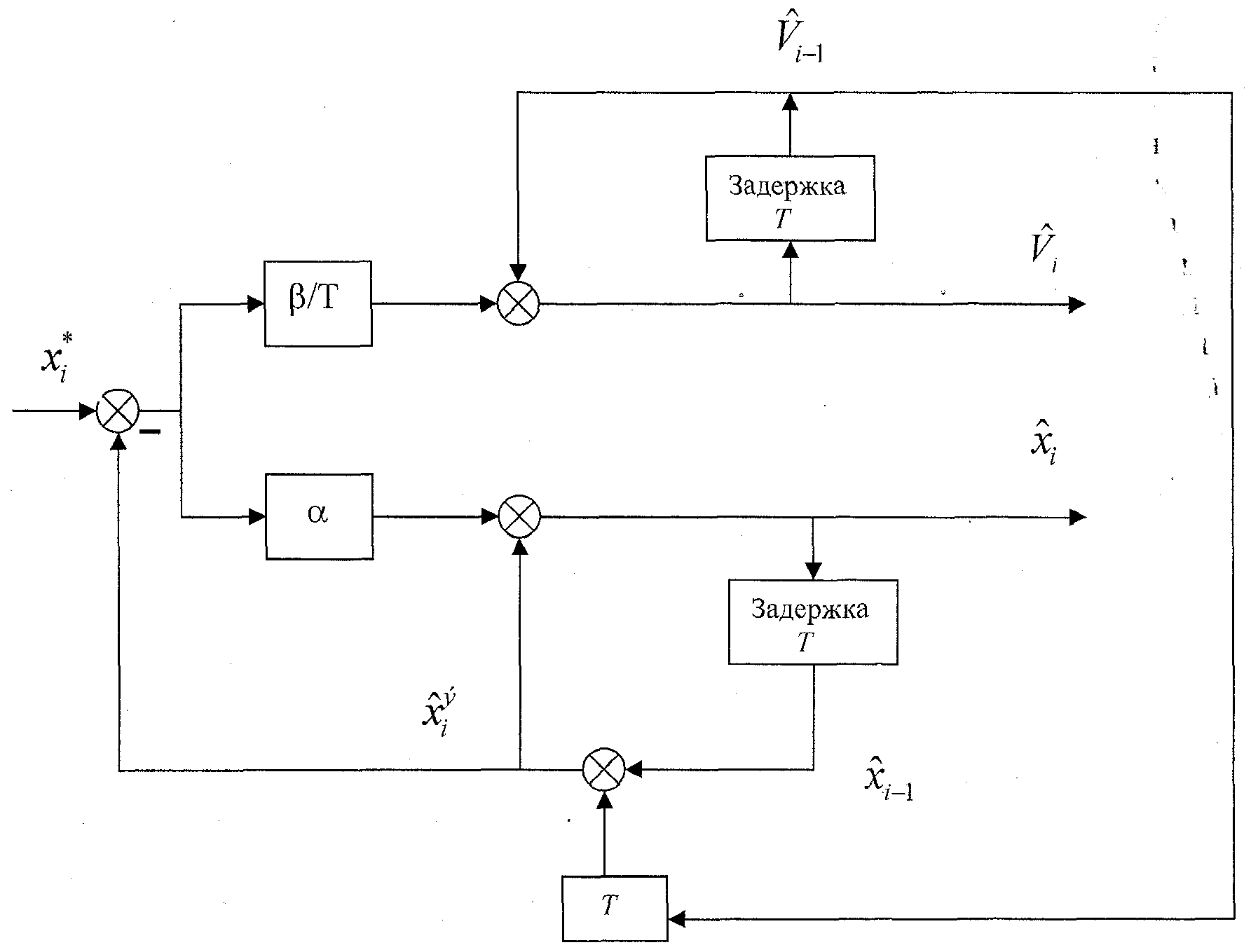
Самолет совершает прямолинейный полет с постоянной скоростью рекуррентные выражения для так называемого α-β фильтра, полученные с использованием метода наименьших квадратов, позволяют производить оценку координаты х местоположения ВС и составляющей скорости V в i-й (текущий) момент локации и имеют следующий вид (для координаты у уравнения имеют аналогичный вид)

где
![]() - прогнозируемое (экстраполированное)
значение координаты на i-й
момент локации по данным оценки
координаты, полученным на предыдущем
(i-1)
- ом моменте локации (на предыдущем
периоде обзора радиолокатора); х*
- измеренное
радиолокатором значение координаты
местоположения ВС на i
- ом
периоде обзора; а,
β -коэффициенты
коррекции по координате и скорости
соответственно, которые определяются
согласно выражениям
- прогнозируемое (экстраполированное)
значение координаты на i-й
момент локации по данным оценки
координаты, полученным на предыдущем
(i-1)
- ом моменте локации (на предыдущем
периоде обзора радиолокатора); х*
- измеренное
радиолокатором значение координаты
местоположения ВС на i
- ом
периоде обзора; а,
β -коэффициенты
коррекции по координате и скорости
соответственно, которые определяются
согласно выражениям
![]()
![]()
i - число радиолокационных измерений по данной цели.
28. Дискретный фильтр Калмана. Математическая постановка.
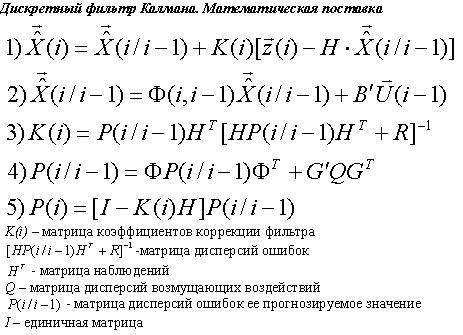
Оцениваемый процесс (вектор состояний) описывают дискретным линейным в общем виде нестационарным уравнением
![]()
где
![]() - вектор
состояний размерностью п:
Ф
- переходная матрица (пхп):
В' -матрица,
распределяющая управления, (пхr);
и - вектор
детермированных управлений размерностью
г;
G'
-
матрица, распределяющая возмущения,
(nxs);
- вектор
состояний размерностью п:
Ф
- переходная матрица (пхп):
В' -матрица,
распределяющая управления, (пхr);
и - вектор
детермированных управлений размерностью
г;
G'
-
матрица, распределяющая возмущения,
(nxs);
![]() -вектор
возмущающих воздействий
размерностью
s
.
-вектор
возмущающих воздействий
размерностью
s
.
Математическая модель измерений представляет собой линейную функцию от компонент вектора состояний
![]()
где
z
- вектор измеряемых параметров размером
т;
С -матрица,
устанавливающая
связь измерений с элементами вектора
состояний, размером (т_п):
![]() - нормальный случайный вектор ошибок
измерений типа "дискретный белый
шум" со статистическими характеристиками,
аналогичными характеристикам возмущающего
воздействия, т.е.
- нормальный случайный вектор ошибок
измерений типа "дискретный белый
шум" со статистическими характеристиками,
аналогичными характеристикам возмущающего
воздействия, т.е.
![]()
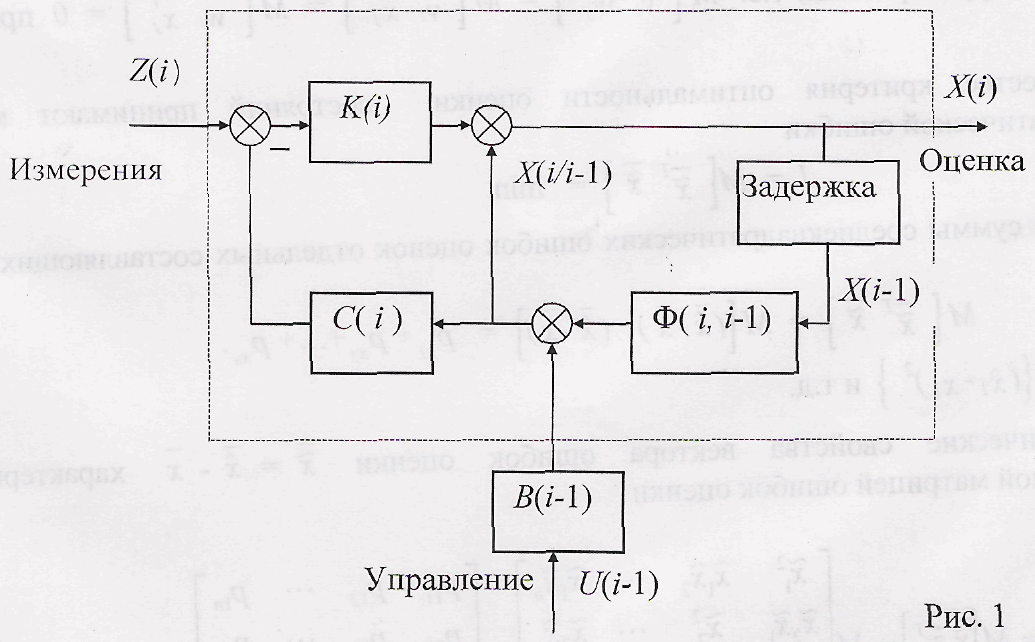
29.Структурная схема фильтра Калмана
Задана
управляемая система в виде физического
соотношения между вектором состояний
х,
управлением
и
и
возмущающим воздействием
![]() .
Задана
также измерительная система в виде
физических соотношений между сигналом
измерений z,
вектором
состояний
.
Задана
также измерительная система в виде
физических соотношений между сигналом
измерений z,
вектором
состояний
![]() и
ошибками измерений
и
ошибками измерений
![]() .
Заданы
статистические характеристики случайных
сигналов
.
Заданы
статистические характеристики случайных
сигналов
![]() и
и
![]() .
Требуется найти оценку состояний
.
Требуется найти оценку состояний
![]() системы
по результатам обработки результатов
измерений
системы
по результатам обработки результатов
измерений
![]() с
ииспользованием
оптимального в заданном смысле
устройства (или алгоритма) оценки,
минимизирующего ошибку оценки
с
ииспользованием
оптимального в заданном смысле
устройства (или алгоритма) оценки,
минимизирующего ошибку оценки
![]()
![]()
где
![]() - вектор
состояний размерностью п:
Ф
- переходная матрица (пхп):
В' -матрица,
распределяющая управления, (пхr);
и - вектор
детермированных управлений размерностью
г;
G'
-
матрица, распределяющая возмущения,
(nxs);
- вектор
состояний размерностью п:
Ф
- переходная матрица (пхп):
В' -матрица,
распределяющая управления, (пхr);
и - вектор
детермированных управлений размерностью
г;
G'
-
матрица, распределяющая возмущения,
(nxs);
![]() -вектор
возмущающих воздействий
размерностью
s
.
-вектор
возмущающих воздействий
размерностью
s
.
Вектор возмущений представляет собой набор случайных некоррелированных между собой процессов типа "дискретный белый шум"
![]()
где
z
- вектор измеряемых параметров размером
т;
С -матрица,
устанавливающая
связь измерений с элементами вектора
состояний, размером (т_п):
![]() - нормальный случайный вектор ошибок
измерений типа "дискретный белый
шум" со статистическими характеристиками,
аналогичными характеристикам возмущающего
воздействия
- нормальный случайный вектор ошибок
измерений типа "дискретный белый
шум" со статистическими характеристиками,
аналогичными характеристикам возмущающего
воздействия
При указанных условиях уравнения дискретного фильтра Калмана, производящего оценку вектора состояний рекуррентным образом, имеют следующий вид;

- прогнозируемое
значение оценки вектора
состояний
на шаг дискретизации
![]()