18. Вторичная обработка рли. Задача обнаружения и сопровождения траекторий. Дать иллюстрирующуй рисунок.
Вторичной обработкой называется обработка радиолокационной информации, полученной за несколько обзоров РЛС с целью обнаружения и непрерывного сопровождения траекторий ВС. Вторичная обработка включает следующие операции:
-
выделение зоны вероятного нахождения ВС (стробирование);
-
сравнение координат отметок в стробе и выбор одной из них для продолжения траектории (сличение);
-
определение параметров движения ВС (координат, курса, скорости, ускорения и т.д.);
-
экстраполяция координат ВС;
При вторичной обработке характерным является применение оптимальных статистических методов оценки параметров траектории полета.

1. Основные характеристики рлс:
- зона обнаружения
- время обзора
- точность определения координат
Зона обнаружения - воздушное пространство, в пределах которого станция обнаруживает объект с определенной эффективной отражающей поверхностью с заданной вероятностью и при этом измеряет их координаты.
Минимальный угол
диаграммы направленности для РЛС
сантиметрового диапазона составляет
несколько десятых долей градуса и 1-3
градуса для РЛС дециметрового и метрового
диапазона. Максимальный угол места
определяется шириной диаграммы
направленности в вертикальной плоскости
плюс угол подъема антенны (если антенна
поворачивается по углу места). Максимальный
угол места РЛС 30-45.
Важной характеристикой является
максимальная дальность действия, которая
зависит от многих факторов. Например,
для целей с эффективной отражающей
поверхностью 5-10 м2
![]() составляет
примерно 300-400 км.
составляет
примерно 300-400 км.
Время обзора - период, через который РЛС облучает цель. Для обзорных РЛС
![]() ,
,
где
![]() -
минимально допустимое число импульсов
в пачке;
-
минимально допустимое число импульсов
в пачке;
![]() - период повторения
импульсов в РЛС,
- период повторения
импульсов в РЛС,
![]() ;
;
![]() - ширина диаграммы
направленности антенны в горизонтальной
плоскости.
- ширина диаграммы
направленности антенны в горизонтальной
плоскости.
Частота повторения
импульсов составляет
![]() гц, а
гц, а
![]() =10-15.
=10-15.
Скорость вращения антенны составляет порядка 5-15 об/мин, что соответствует времени обзора 4-12 с.
Точность
измерения дальности
![]() и азимута
и азимута
![]() характеризуется величинами случайных
ошибок измерения, которые обычно считают
подчиненными нормальному закону
распределения. При этом принимается,
что ошибки измерения дальности и азимута
независимы между собой и представляют
некоррелированные последовательности
типа дискретного белого шума. Ошибки
измерения имеют систематическую и
случайную составляющие. Обычно считается,
что систематическая ошибка скомпенсирована.
характеризуется величинами случайных
ошибок измерения, которые обычно считают
подчиненными нормальному закону
распределения. При этом принимается,
что ошибки измерения дальности и азимута
независимы между собой и представляют
некоррелированные последовательности
типа дискретного белого шума. Ошибки
измерения имеют систематическую и
случайную составляющие. Обычно считается,
что систематическая ошибка скомпенсирована.
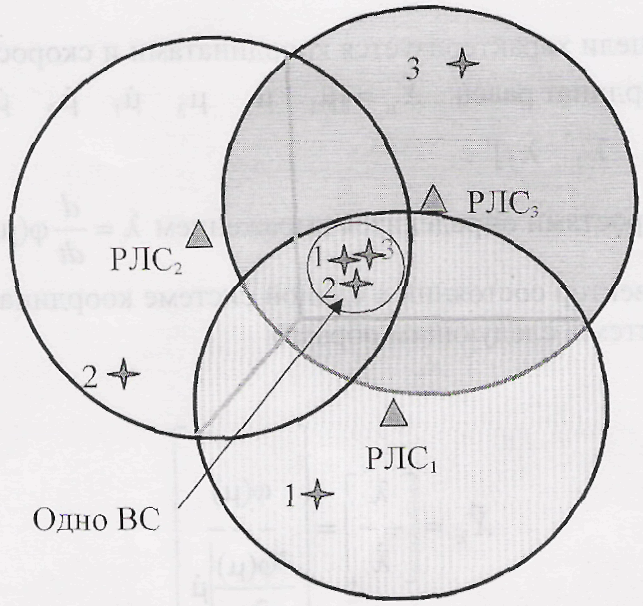
35.Мультирадарная обработка рли. Этапы обработки. Метод мозаичной обработки.
Основными этапами мультирадарной (третичной) обработки являются: сбор донесений о целях, поступающих от РЛС; приведение отметок к единой системе координат - приведение к единому времени отсчета:
установление принадлежности отметок к целям (отождествление); объединение информации о каждой из целей, содержащейся в отметках, поступающих от различных источниках.
Наиболее простым методом мультирадарной обработки является так называемая мозаичная обработка. При мозаичная обработке зона наблюдения разбивается на отдельные области. Если на обработку поступает несколько отметок от различных РЛС, то обработке подвергается информация от той РЛС, которая назначена как приоритетная для данной области.