

6.1.3. Автооператоры
Автооператоры предназначены для транспортирования изделий по технологическим позициям линии для химической и электрохимической обработки поверхности и получения металлических и неметаллических покрытий. Основным назначением автооператора является подъем, опускание и горизонтальное перемещение загрузочного приспособления. Параметры основных типов автооператоров приведены в ГОСТ 23739-85. Согласно этого ГОСТа, скорость горизонтального перемещения автооператора ограничена 0,5 м/с, вертикального - 0,15 м/с.
Кинематическая схема горизонтального перемещения автооператора показана на рис. 6.4.
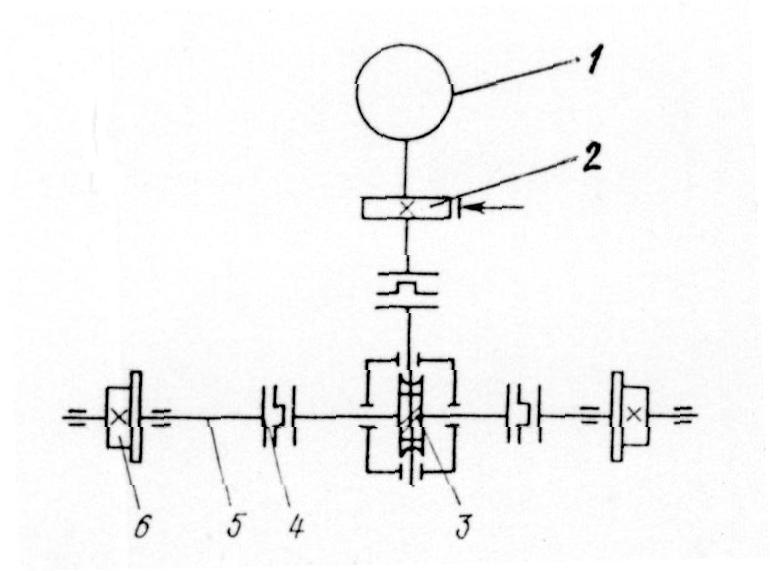
Рис.6.4. Кинематическая схема горизонтального перемещения автооператора.
1- электродвигатель, 2-электротормоз, 3-редуктор, 4-муфта, 5 - вал, 6-опорно-приводные ролики.
Автооператор перемещается по направляющим на опорно-приводных роликах. Во вращение ролики приводятся от электродвигателя через понижающий редуктор. На валу между электродвигателем и редуктором расположен электротормоз, представляющий собой диск с тормозными колодками. Электротормоз предназначен для резкой остановки автооператора над центром ванны. Команда на отключение электродвигателя и включение электротормоза подается от геркона (управляющего элемента с замыканием-размыканием контакта под влиянием постоянного магнита, укрепленного на направляющих). Точность остановки составляет 15-45 мм.
Кинематическая схема вертикального перемещения автооператора показана на рис. 6.5. Каретка закреплена на цепи и перемещается внутри вертикальных направляющих, фиксируясь с помощью роликов. Вращающий момент от электродвигателя через редуктор подается на ведущие звездочки. Резкая остановка каретки осуществляется с помощью электротормоза. Отключение электродвигателя и включение электротормоза осуществляется концевыми выключателями при нажатии натяжным устройством, укрепленным на цепи.
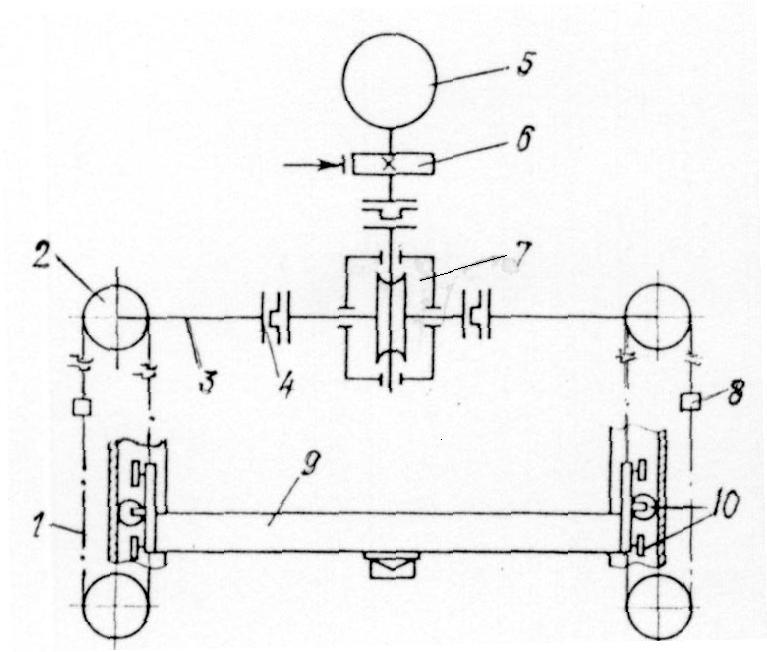
Рис. 6.5. Кинематическая схема вертикального перемещения автооператора.
1-тяговые цепи, 2- звездочки, 3-вал, 4- муфта, 5- электродвигатель, 6-электротормоз, 7-редуктор, 8- натяжное устройство, 9-каретка, 10- направляющие ролики перемещения каретки.
Внешний вид автооператоров портального, консольного и тельферного типа показан на рис. 6.6 - 6.8.
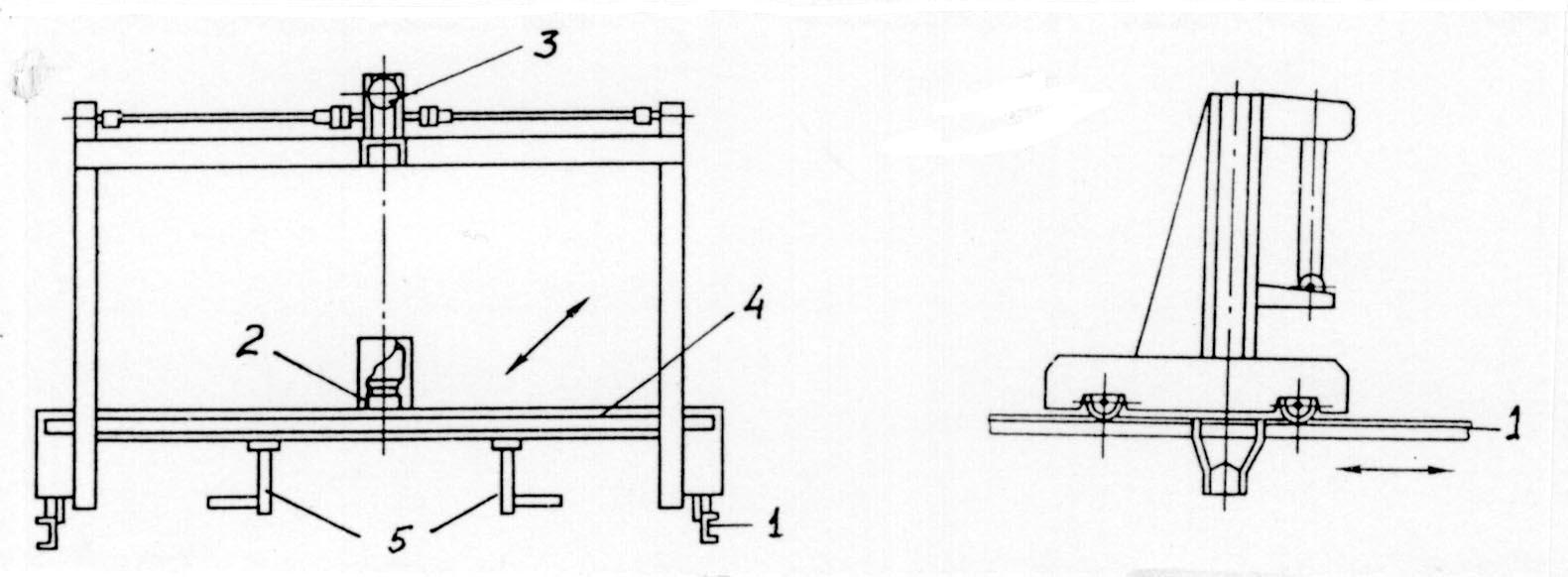
Рис. 6.6. Автооператор портального типа
1-направляющий рельс (швелер), 2- механизм горизонтального перемещения, 3 - механизм вертикального перемещения, 4 - каретка,
5- грузозахваты.
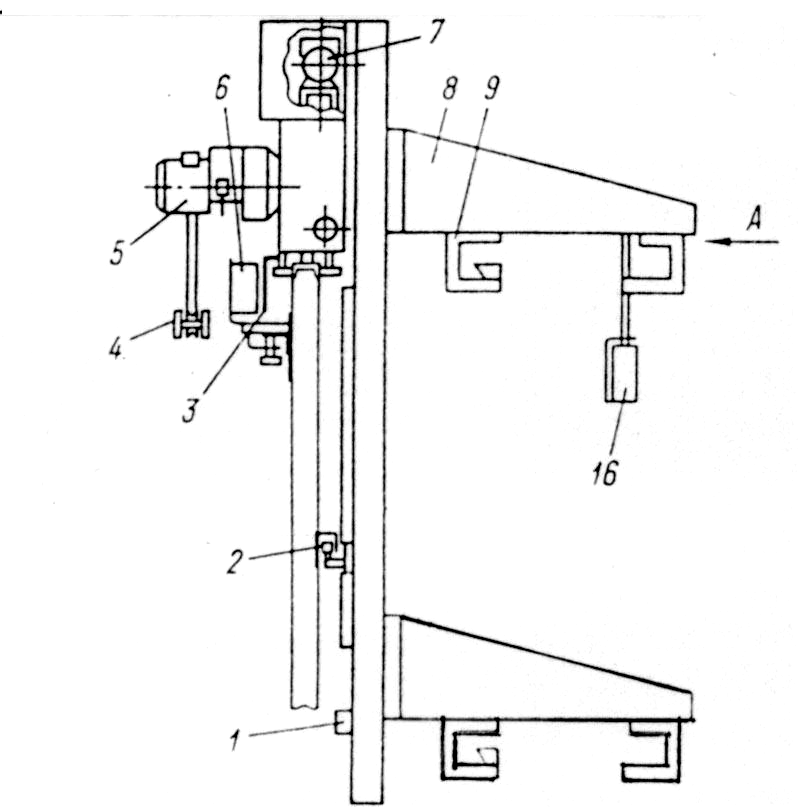
Рис. 6.7. Автооператор консольного типа
1- механизм горизонтального перемещения, 2 - механизм вертикального перемещения, 3 - стабилизирующие ролики, 4 - каретка, 5- позиционные выключатели для управления горизонтальным перемещением автооператора, 6 - позиционные выключатели для управления вертикальным перемещением автооператора.
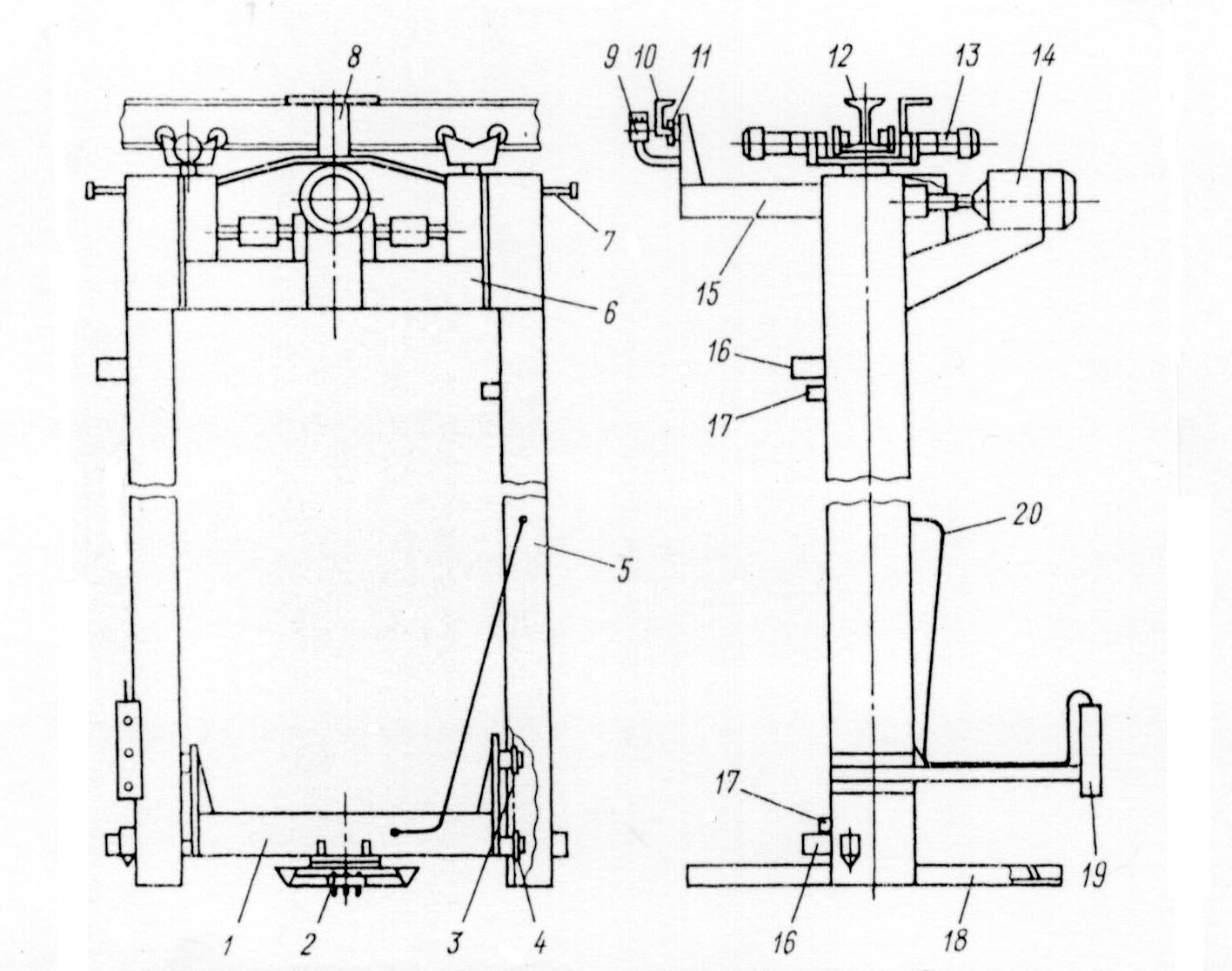
Рис.6.8. Автооператор тельферного типа.
А - направляющий двутавр, В - поддерживающий швеллер
1-корпус, 2-механизм горизонтального перемещения (электродвигатель, редуктор, электротормоз, опорно-приводные ролики), 3-механизм вертикального перемещения, 4-вертикальные направляющие перемещения каретки, 5 - каретка, 6-грузозахват, 7 - рычаг для гашения колебаний с двумя роликами 8 на поддерживающем швеллере , 9-направляющие ролики перемещения каретки, 10-буферные устройства для гашения динамических нагрузок при столкновении автооператоров, 11- концевые выключатели, ограничивающие вертикальное перемещение каретки, 12-кронштейн для воздействия на путевые датчики горизонтального перемещения автооператора.