

3.4.3.3. Теореми про зміну кінетичної енергії
Для матеріальної точки масою
![]() ,
що рухається під дією сили
,
що рухається під дією сили
![]() ,
основне рівняння динаміки має вигляд:
,
основне рівняння динаміки має вигляд:
 .
.
Помножимо обидві частини цього
співвідношення скалярно на
![]() :
:
 ,
,
звідкіля
![]() .
.
Так як
 і
і
![]() ,
то:
,
то:
|
|
(3.116) |
 .
.Формула (3.116) є математичним записом теореми про зміну кінетичної енергії матеріальної точки в диференціальній формі: диференціал кінетичної енергії матеріальної точки дорівнює елементарній роботі сили, що діє на цю точку.
Якщо обидві частини (3.116) поділити на
![]() ,
то отримаємо рівняння
,
то отримаємо рівняння
|
|
(3.117) |
 ,
,з якого виходить, що похідна за часом від кінетичної енергії точки дорівнює потужності сили, прикладеної до цієї точки.
Проінтегруємо обидві частини рівняння
(3.116) в межах, відповідних значенням
величин при початковому
![]() і кінцевому
і кінцевому
![]() положеннях рухомої точки, і знаходимо:
положеннях рухомої точки, і знаходимо:
|
|
(3.118) |
або
|
|
(3.118') |
Отже, зміна кінетичної енергії матеріальної точки на деякому її переміщенні дорівнює сумі робіт прикладених до неї сил на тому ж переміщенні.
Розглянемо механічну систему, що
складається з
![]() матеріальних точок
матеріальних точок
![]() масою
масою
![]() кожна, і яка рухається відносно нерухомої
системи відліку. Прикладемо до точок
системи зовнішні і внутрішні сили. Тоді
для
кожна, і яка рухається відносно нерухомої
системи відліку. Прикладемо до точок
системи зовнішні і внутрішні сили. Тоді
для
![]() ї
точки теорема про зміну кінетичної
енергії приймає вигляд:
ї
точки теорема про зміну кінетичної
енергії приймає вигляд:
|
|
|
або
|
|
|
Підсумуємо ці рівняння по всіх
![]() точках системи:
точках системи:
|
|
|
 .
.
Рахуючи, що
 - кінетична енергія системи, а
- кінетична енергія системи, а
 ,
,
 ,
де
,
де
![]() ,
,
![]() - елементарні роботи всіх зовнішніх і
всіх внутрішніх сил відповідно, отримаємо:
- елементарні роботи всіх зовнішніх і
всіх внутрішніх сил відповідно, отримаємо:
|
|
(3.119) |
Таким чином диференціал кінетичної енергії матеріальної системи дорівнює сумі елементарних робіт всіх зовнішніх та внутрішніх сил, що діють на систему.
Інтегруючи вираз (3.119), отримаємо математичну інтерпретацію теореми в інтегральній формі:
|
|
(3.120) |
де
![]() ,
,
![]() - відповідно повні роботи зовнішніх і
внутрішніх сил на скінченому переміщенні
1-2 системи.
- відповідно повні роботи зовнішніх і
внутрішніх сил на скінченому переміщенні
1-2 системи.
Отже, зміна (приріст) кінетичної енергії системи при переході її з одного положення в інше дорівнює сумі робіт всіх зовнішніх і внутрішніх сил, що діють на систему на даному переміщенні.
Частинний випадок.
Для абсолютно твердого тіла сума робіт всіх внутрішніх сил системи дорівнює нулю. Тому теорема про зміну кінетичної енергії твердого тіла набуває вигляду:
|
|
(3.121) |
Треба мати на увазі, що, на відміну від розглянутих нами інших загальних теорем динаміки системи, до теореми кінетичної енергії можуть входити внутрішні сили.
3.5 Динаміка плоскопаралельного руху твердого тіла
Як відомо з кінематики, положення тіла, що здійснює плоскопаралельний рух, в будь-який момент часу визначається положенням полюса і кутом повороту тіла навколо цього полюса.
Виберемо в площині руху центра мас тіла
нерухому систему відліку
![]() ,
відносно якої розглядається рух, і
систему координат
,
відносно якої розглядається рух, і
систему координат
![]() ,
що рухається поступально разом з центром
мас
,
що рухається поступально разом з центром
мас
![]() тіла (рис.3.23).
тіла (рис.3.23).
Х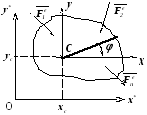 ай
на тіло діють зовнішні сили
ай
на тіло діють зовнішні сили
![]() ,
що лежать в площині руху. Тоді за теоремою
про рух центра мас системи отримаємо
два диференціальних рівняння:
,
що лежать в площині руху. Тоді за теоремою
про рух центра мас системи отримаємо
два диференціальних рівняння:
Рис.3.23
|
|
(3.122) |
в яких
![]() -
маса тіла.
-
маса тіла.
Обертальний рух тіла навколо центра
мас визначається диференціальним
рівнянням обертання твердого тіла
навколо нерухомої осі
![]() ,
що проходить через центр мас С тіла
перпендикулярно до площини
,
що проходить через центр мас С тіла
перпендикулярно до площини
![]() :
:
|
|
(3.123) |
 .
.Рівняння (3.122) і (3.123) називаються диференціальними рівняннями плоскопаралельного руху.
За допомогою цих рівнянь можна розв’язувати обидві основні задачі динаміки.
При невільному русі, коли траєкторія
центра мас тіла відома, рівняння руху
центра мас тіла зручно записати в
проекціях на осі натурального тригранника
![]() і
і
![]() .
Тоді будемо мати систему рівнянь:
.
Тоді будемо мати систему рівнянь:
|
|
(3.124) |
 .
.