

V. Методика експерименту
Схема установки для дослідження лобового опору приведена на рис.9.1. На горизонтальній осі може обертатися стержень 1 з закріпленими на ньому пластинкою 2 і регулюючими циліндриками 3.
Рис.9.
1

Повертаючи стержень 1 навколо його повздовжньої осі, пластинка 2 може бути встановлена і закріплена так, що вектор лінійної швидкості її точок при русі пластинки під дією важка 5 буде нормальний або паралельний до площини пластини. В першому випадку лобовий опір буде великий, а в другому положенні він значно менший. Нехтуючи силами тертя у підшипниках, силами тертя важка і стержня об повітря, рівняння руху системи можна записати у вигляді:
![]() ,
,
![]() (9.4)
(9.4)
![]()
де
m
– маса важка, J
– момент інерції стержня з закріпленими
на ньому циліндриками і пластинкою, Fн
– сила натягу нитки, r
– радіус диска 4, a
– прискорення, з яким падає важок 5, g
– прискорення сили тяжіння,
![]() – кутове прискорення,
– кутова швидкість, С
–
коефіцієнт моменту сили лобового опору
пластинки.
– кутове прискорення,
– кутова швидкість, С
–
коефіцієнт моменту сили лобового опору
пластинки.
З рівняння (9.4) для кутового прискорення одержуємо:
![]() =
0–B, (9.5)
=
0–B, (9.5)
де
![]() ,
, ![]() . (9.6)
. (9.6)
З рівняння (9.5) слідує, що прискорення (як кутове, так і важка 5) залежить від швидкості. Якщо поверхня пластинки паралельна площині обертання, то припускаючи С=0 , із рівнянь (9.6) і (9.5) слідує, що обертання пластинки відбувається з постійним кутовим прискоренням
![]() =
0
= const. (9.7)
=
0
= const. (9.7)
Знаючи віддаль h0, яку проходить важок 5 за час t0, можна вирахувати кутове прискорення
 . (9.8)
. (9.8)
У загальному випадку (тобто коли С0) кутова швидкість системи з часом збільшується, наближаючись до деякої найбільшої, постійної в часі величини max. Величина цієї швидкості може бути одержана із умови, що при досягненні цієї швидкості кутове прискорення стане рівне нулю. Тоді з рівняння (6.5) маємо:
![]() . (9.9)
. (9.9)
Максимальна швидкість, з якою опускається важок 5, буде рівна
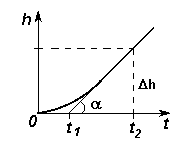
Рис.
9.2
![]() (9.10)
(9.10)
Припустимо, що експериментально одержана залежність віддалі h, яку проходить важок, від часу t має вигляд, представлений на рис. 9.2. Тангенс кута нахилу h(t) лінійної ділянки кривої дає приблизне значення максимальної швидкості опускання важка
 . (9.11)
. (9.11)
Згідно графіка h2–h1 = h = h. Із рівняння (9.11 ) та (9.10) визначимо
![]() . (9.12)
. (9.12)
Коефіцієнт опору C тоді записується (див. 9.6)
![]() . (9.13)
. (9.13)
Використовуючи формулу (9.6) для 0, формулу (9.13) перепишемо так:
 . (9.14)
. (9.14)
Формула (9.14) – кінцева робоча формула. Крім коефіцієнта моменту лобового опору С, в роботі обчислюється кутове прискорення 0 для початкового руху пластини за формулою (9.8), максимальний момент сили лобового опору Мmах=Сmах та момент інерції J за формулою:
 . (9.15)
. (9.15)