

-
Схемная реализация регулятора
Рассмотрим
вопрос реализации системы управления
некоторым объектом. Пусть необходимо
удерживать величину (координату)
![]() на выходе некоторого объекта на постоянном
уровне независимо от изменения внешних
условий. Объектом может быть стабилизатор
напряжения, устройство поддержания
температуры в помещении и т. п.
на выходе некоторого объекта на постоянном
уровне независимо от изменения внешних
условий. Объектом может быть стабилизатор
напряжения, устройство поддержания
температуры в помещении и т. п.
Эта задача обычно решается с помощью регулятора, образующего совместно с объектом типичную структуру с ООС (рис. 154).

Рис. 154
На входе регулятора производится
сравнение регулируемой координаты
![]() с заданным значением (уставкой)
с заданным значением (уставкой)
![]() .
Разность этих величин усиливается и
подается через исполнительный механизм
на объект. Чем больше коэффициент
усиления
.
Разность этих величин усиливается и
подается через исполнительный механизм
на объект. Чем больше коэффициент
усиления
![]() регулятора, тем меньше может быть ошибка
регулятора, тем меньше может быть ошибка
![]() и точнее регулирование. Однако имеющая
место инерционность объекта обычно не
позволяет реализовать такой простой
пропорциональный закон регулирования.
Для устранения возникающей при больших
значениях
и точнее регулирование. Однако имеющая
место инерционность объекта обычно не
позволяет реализовать такой простой
пропорциональный закон регулирования.
Для устранения возникающей при больших
значениях
![]() и минимизации ошибки в регулятор вводят
интегрирующее звено и формируют его
выходной сигнал в виде
и минимизации ошибки в регулятор вводят
интегрирующее звено и формируют его
выходной сигнал в виде
![]() .
.
Недостаток пропорционально-интегрального
(ПИ) закона регулирования — малая
чувствительность к быстропеременным
возмущениям. Поэтому в регулятор вводят
звено, формирующее сигнал, пропорциональный
производной регулируемой координаты
![]() :
:
![]() .
.
Данный закон управления называется пропорционально-интегрально-дифференциальным (ПИД), регуляторы, реализующие такой закон называются ПИД-регуляторами.
Чтобы иметь возможность получить
наилучшие свойства у системы (время
переходного процесса, перерегулирование,
точность и т. д.), производят настройку
регулятора подбором значений
![]() ,
,
![]() ,
,
![]() .
.
Аппаратно ПИД-регулятор может быть
реализован с помощью элементов аналоговой
электроники. Рассмотрим вопрос получения
устройств, способных выполнять
интегрирование и дифференцирование
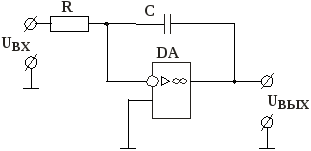
сигналов. На рис. 155,а показана схема
простого интегратора. Так как ток,
текущий через конденсатор
![]() равен (в силу идеальности ОУ) току
равен (в силу идеальности ОУ) току
![]() ,
текущему через резистор, и
,
текущему через резистор, и
![]() ,
то
,
то
![]() .
Пределами интегрирования являются
моменты начала и конца отслеживания
сигнала.
.
Пределами интегрирования являются
моменты начала и конца отслеживания
сигнала.
|
|
|
|
а) |
б) |
|
Рис. 155 |
|
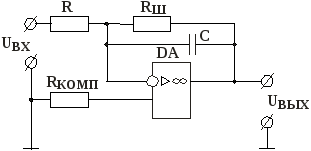
Из-за неидеальности ОУ сигнал на выходе
рассмотренного интегратора, будет
определяться выражением
![]() .
Уменьшить ошибку интегрирование можно
за счет усложнения схемы (рис. 155,б).
Резистор
.
Уменьшить ошибку интегрирование можно
за счет усложнения схемы (рис. 155,б).
Резистор
![]() снижает ошибку на низких частотах, когда
емкостное сопротивление конденсатора
велико. Так как этот резистор ограничивает
частотный диапазон интегрирования
снизу, его выбирают из условия
снижает ошибку на низких частотах, когда
емкостное сопротивление конденсатора
велико. Так как этот резистор ограничивает
частотный диапазон интегрирования
снизу, его выбирают из условия
![]() .
Резистор
.
Резистор
![]() предназначен для компенсации смещения:
предназначен для компенсации смещения:
![]() .
Максимальная частота интегрирования
составляет
.
Максимальная частота интегрирования
составляет
![]() .
.
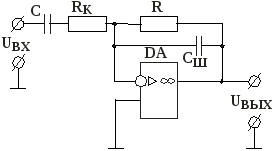
|
|
|
Рис. 156 |
Библиографический список
-
Гальперин М.В. Практическая схемотехника в промышленной автоматике. — М.: Энергоатомиздат, 1987. — 320 с.
-
Коломбет Е.А. Микроэлектронные средства обработки аналоговых сигналов. — М.: Радио и связь, 1991. — 376 с.
-
Лачин В.И., Савелов Н.С. Электроника: Учеб. пособие. — Ростов н/Д: Изд-во «Феникс», 2000. — 448 с.
-
Опадчий Ю.Ф., Глудкин О.П., Гуров А.И. Аналоговая и цифровая электроника (Полный курс): Учебник для вузов. — М.: Горячая линия — Телеком, 2000. — 768 с.
-
Теория автоматического управления: Учеб. для машиностроит. спец. вузов/ В.Н. Брюханов, М.Г. Косов, С.П. Протопопов и др.; Под ред. Ю.М. Соломенцева. — М.: Высш. шк., 1999 — 268 с.
-
Фолкенберри Л. Применение операционных усилителей и линейных ИС / Пер. с англ. — М.: Мир, 1985. — 572 с.