

2.1. Опоры
В курсе строительной механики рассматривается расчет геометрически неизменяемых систем (сооружений), т. е. таких, перемещения отдельных точек которых возможны только в результате деформации систем. Неподвижность таких систем (их геометрическая неизменяемость) относительно земли обеспечивается опорными связями (опорами). В опорах возникают реакции, которые вместе с заданными нагрузками представляют уравновешенную систему внешних сил, действующих на сооружение. Рассмотрим различные типы опор плоских систем.
Первый тип опоры представлен на Рис. 2.1. Он состоит из двух балансиров — верхнего 1 и нижнего 3, между которыми проложен валик 2, играющий роль цилиндрического шарнира. Благодаря
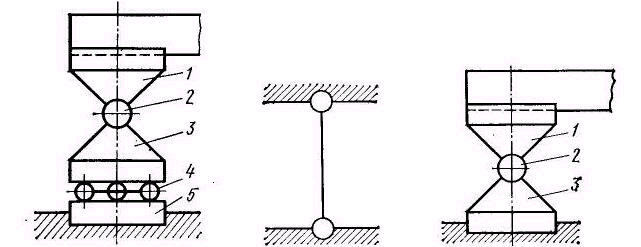
Рис. 2.1 Рис. 2.2 Рис. 2.3
этому валику верхний балансир может поворачиваться относительно нижнего. Кроме того, он может (вместе с нижним балансиром, опирающимся на катки 4) перемещаться по опорной плоскости, называемой опорной подушкой 5.
Рассматриваемая опора имеет, следовательно, две степени свободы (изменяемости). Трением, развивающимся в опоре, принято при расчете пренебрегать, а потому реакция такой опоры представляет собой силу, проходящую через центр шарнира и перпендикулярную направлению возможного перемещения катков, т. е. верхней плоскости опорной подушки. Эта сила определяется одним параметром — ее величиной. Рассматриваемая опора носит название шарнирно-подвижной. Схематически ее изображают в виде одного стержня с двумя идеальными (без трения) шарнирами на концах (Рис. 2. 2).
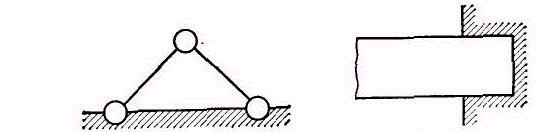
Рис. 2.4 Рис. 2.5
Стержень, схематически изображающий шарнирно-подвижную опору, условно принимается бесконечно длинным; верхняя точка такого стержня может перемещаться лишь по прямой линии (прямая есть окружность бесконечно большого радиуса), перпендикулярной его оси, что полностью соответствует тем условиям, в которых находится действительная шарнирно-подвижная опора. Собственные деформации опоры при расчетах не учитываются, т. е. опорный стержень условно считается бесконечно жестким.
Второй тип опоры (Рис. 2. 3) отличается от первого тем, что нижний балансир 3 закреплен и не может перемещаться. Такая опора обладает одной степенью свободы и носит название шарнирно-неподвижной. Реакция ее представляет собой силу, проходящую через центр шарнира. Эта сила может иметь любое направление и определяется, следовательно, двумя параметрами — величиной и направлением (или, что то же самое, величинами двух составляющих ее сил, например вертикальной и горизонтальной).
Схематически опора второго типа изображается с помощью двух стержней с идеальными шарнирами по концам; верхний шарнир является общим для обоих стержней (Рис. 2. 4). Такая схема определяет точку приложения опорной реакции (центр верхнего шарнира), оставляя ее направление неизвестным.
Направления стержней на схеме шарнирно-неподвижной опоры могут быть выбраны вполне произвольно, так как силу (реакцию) можно разложить на два любых направления.
Третьим типом опоры является так называемая защемляющая неподвижная опора, или заделка (Рис. 2. 5), степень свободы которой равна нулю. Реакция такой опоры определяется тремя параметрами, например: величиной и направлением силы, проходящей через произвольную точку, и моментом относительно этой точки. Эту реакцию можно представить как сочетание реактивного момента в заделке (опорном сечении) с реакцией шарнирно-неподвижной опоры.