

8.2 Расчет одиночного стержня.
Определим усилия в стержнях N1, N2, N3, N4, принимая в качестве неизвестного перемещение Z1. Устраним перемещение Z1, введя по его направлению дополнительную связь (Рис.8.1,б). Сформированную таким образом систему назовем основной системой метода перемещений. Сообщим введенной связи принудительное смещение Z1, которое определим из условия равенства нулю суммарной реакции R1 в этой связи, так как в действительности сама связь отсутствует. Будем считать реакцию положительной, если ее направление совпадает с принятым направлением перемещения, и отрицательной – в противном случае.
В основной системе
от нагрузки F реакция в связи
![]() (Рис.8.1,б). От смещенияZ1
для линейно-упругой системы реакция в
связи пропорциональна перемещению Z1.
Представим ее в виде:
(Рис.8.1,б). От смещенияZ1
для линейно-упругой системы реакция в
связи пропорциональна перемещению Z1.
Представим ее в виде:
![]() ,
где r11
– реакция от единичного смещения
,
где r11
– реакция от единичного смещения
![]() (Рис.8.1,в).
Согласно принципу суперпозиции условие
отсутствия полной реакции в присоединенной
связи имеет вид:
(Рис.8.1,в).
Согласно принципу суперпозиции условие
отсутствия полной реакции в присоединенной
связи имеет вид:
![]() (8.1)
(8.1)
или
![]() (8.2)
(8.2)
Составляя сумму моментов относительно точки О (Рис.8.1,в), находим:
![]()
Из уравнения (8.2) получим:
![]()
Усилия в стержнях,
показанные на Рис.8.1,в, найдены от
единичного смещения
![]() умножая их на фактическое перемещение
z1,
получим искомые значения сил:
умножая их на фактическое перемещение
z1,
получим искомые значения сил:
![]()
Разрешающее уравнение (8.2) выражает в соответствующей форме условие равновесия системы, получившей под нагрузкой F перемещение z1; иначе говоря, это уравнение равновесия системы, выраженное через перемещение z1.
Аналогичные рассуждения можно провести и для рамных систем, где использование метода перемещений является особенно эффективным.
Рассмотрим плоскую раму (Рис.8.2,а) в деформированном состоянии как совокупность отдельных стержневых элементов, объединенных в узлах. Деформированное состояние каждого элемента вполне определяется нагрузкой, непосредственно приложенной к этому элементу, и перемещениями его концевых сечений. Отдельные стержни, показанные на Рис.8.2,а, деформированы так же как и в составе рамы, что достигается смещением концевых сечений стержней на величины, равные перемещениям узлов рамы.
Если пренебречь изменением длин стержней в процессе деформации, то в целом деформированное состояние рамы будет определено тремя перемещениями узлов: z1 – горизонтальным линейным смещением ригеля; z2 и z3 – углами поворотов узлов, т.е. степень кинематической неопределимости рамы равна трем.
Основная система с присоединенными связями, устраняющими эти перемещения, показана на Рис.8.2,б. Условные защемления, введенные в узлы и устраняющие их углы поворотов, называются плавающими заделками, так как считается, что устраняя поворот, они не препятствуют соответствующему линейному смещению узла. При устранении связи 1 рама деформируется без поворота узлов (Рис.8.2,в).
Уравнения равновесия рамы, выраженные через перемещения z1, z2 и z3 получим, приравнивая нулю суммарные реакции в присоединенных связях (сосредоточенная сила в линейной связи) и моменты в угловых связях:
Система уравнений (8.3) является разрешающей системой для рассматриваемой рамы по методу перемещений. Для того чтобы можно было развернуть каждое из равенств (8.3), нужно предварительно изучить работу отдельных стержней, составляющих основную систему, на воздействие
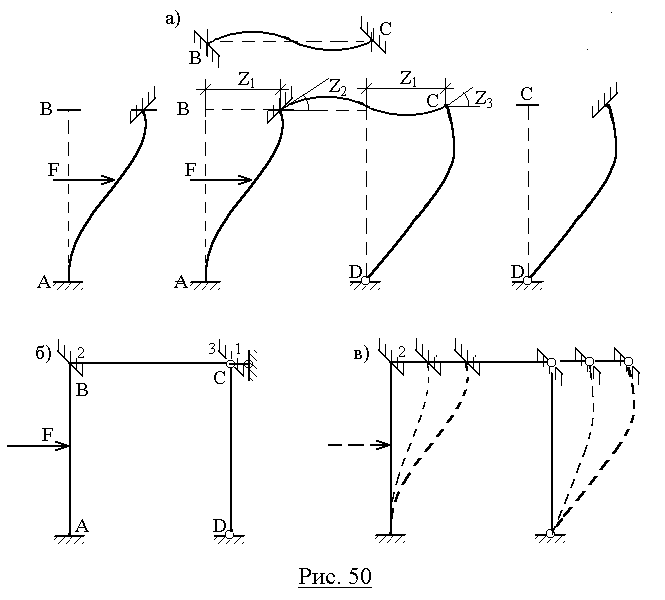
Рис.8. 2
различных видов нагрузки и смещений опорных закреплений. Если предварительно вычислить реакции по концам стержней от указанных воздействий, то, используя принцип суперпозиции, каждую из полных реакций (8.3) можно записать как сумму слагаемых, выражающих каждое воздействие отдельно.