

122
Приложение Е. Расчет опорно-поворотных подшипников
Контактные напряжения, возникающие в поверхностных слоях контактирующих тел, будем вычислять при начальном касании в точке и при начальном касании по линии
При начальном касании в точке в предположении, что коэффициенты Пуассона контактирующих материалов равны 0,3, для вычисления σH Д.Н. Решетов [27] рекомендует формулу, полученную на основе решения Герца − Беляева,
______ |
|
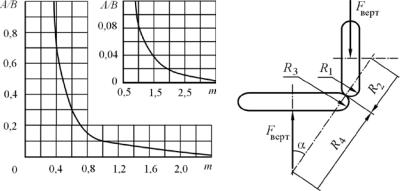
σH = m 3√ FE2/R2 , |
(Е.1) |
где E = 2E1E2/(E1 + E2) – приведенный модуль упругости; E1, E2
– модули упругости первого и второго контактирующих тел, МПа; 1/R = 1/R2 + 1/R4 − приведенная кривизна в плоскости наиболее плотного касания; m – коэффициент, определяемый по графикам рис. П.6.1, а в зависимости от отношения A/B = (1/R2 + 1/R4)/(1/R1 + 1/R3) ≤ 1 главных кривизн. Для тела с внутренним контактом радиус кривизны принимается отрицательным. Рис. Е.1, б иллюстрирует эту расчетную схему применительно к контакту двух торовых поверхностей. Здесь
сила F в контакте равна F = Fверт/cos α, где α – угол контакта. Вычисление коэффициента m также может быть
выполнено по эмпирической формуле
lg m = – 0,396 lg(A/B) – 0,42. |
(Е.2) |
Оглавление
Иванов А.С., Муркин С.В. «Конструирование современных мотор-редукторов»
123
а |
б |
|
Рис. Е.1 |
При начальном касании по линии в предположении, что коэффициенты Пуассона контактирующих материалов равны
0,3,
______ |
|
σH = 0,418√ FE/(lR) , |
(Е.3) |
где l − длина контакта, мм; R1 и R2 − радиусы двух контактирующих цилиндров; R − приведенный радиус кривизны: 1/R = 1/R2 ± 1/R1 (знак «+» берут при наружном, а «−» − при внутреннем контакте поверхностей).
Зазоры в опорно-поворотном подшипнике назначают сравнительно малыми (при среднем диаметре более 200 мм – соответственно 0,02÷ 0,055 мм при скорости подшипника 0,1 м/с и 0,04÷ 0,12 мм при его скорости 8 м/с). Поэтому вычисляем силу F1, действующую на одно наиболее нагруженное тело качения, для беззазорного подшипника. Так как опорно-поворотные подшипники могут воспринимать
Оглавление
Иванов А.С., Муркин С.В. «Конструирование современных мотор-редукторов»
124
осевую Fa и радиальную Fr силы, а также опрокидывающий момент M, то силу F1, оцениваем при действии на подшипник трех силовых факторов Fa, Fr, M:
F1 = F1a + F1r + F1M, |
(Е.4) |
где F1a= k1Fa/(z sin α), F1r=k2Fr/(z cos α)r, F1r=k2Fr/(z cos α) –
силы, действующие на наиболее нагруженное тело, соответственно от осевой и радиальной нагрузок, а также от опрокидывающего момента; z – число тел качения в одном ряду, α – угол контакта (угол, образованный нормалью к поверхностям контакта с плоскостью перпендикулярной оси вращения подшипника), k1 , k2, k3 – коэффициенты, зависящие от типа подшипника.
Для подшипников (см. рис. 3.16) сдвоенного и с четырехточечным контактом α = 450, R1 = R2 = Dw/2,
R3 = rвн/cosα = 0,5(d0/cos α – Dw), R4 = ρ, где Dw – диаметр тела качения, rвн – радиус дорожки качения внутреннего кольца, d0
– средний диаметр подшипника, ρ – радиус канавки дорожки качения (часто ρ = 0,52 Dw). Коэффициент k1 = 1, так как осевая нагрузка передается на внутреннее кольцо одним рядом тел качения, причем каждым из тел в одной точке. Коэффициент k2 = 2,2 в связи с участием в передаче радиальной нагрузки, действующей на подшипник, двух рядов тел качения (двух рядов точек контакта в подшипнике с четырехточечным контактом). Коэффициент k3 = 4,37, так как в передаче опрокидывающего момента участвует или один ряд тел качения или один ряд точек контакта, хотя по одну сторону от оси, относительно которой действует момент,
Оглавление
Иванов А.С., Муркин С.В. «Конструирование современных мотор-редукторов»
125
нагружается первый ряд тел качения (точек контакта), а по другую сторону – второй.
Для проволочного шарикоподшипника α = 450, радиусы кривизны в контакте тела качения с проволокой, расположенной по внутреннему диаметру подшипника
составляют R1 = R2 = Dw/2, R3 = dпр/2, R4 = 0,5(d0/cosα – Dw).
Коэффициенты по тем же причинам, что рассмотрены ранее,
равны k1 = 1, k2 = 2,2, k3 = 4,37.
Для подшипника с перекрёстным расположением роликов α = 450, радиусы кривизны в контакте тела качения с внутренним кольцом составляют R1 = Dw/2, R2 = 0,5(d0/cosα – Dw), Коэффициент k2 = 4, так как радиальную нагрузку воспринимают все ролики. Коэффициенты k1 = 2, k3 = 8, так как в передаче осевой нагрузки и опрокидывающего момента участвует лишь половина роликов.
В трехрядном роликоподшипнике осевую нагрузку и момент воспринимают упорные подшипники. Для них
α= 900, R1 = Dw/2, R2 = ∞, k1 = 1, k3 = 4. Радиальную нагрузку воспринимает радиальный подшипник. Для него при рассмотрении контакта тела качения с внутренним кольцом
α= 0, R1 = Dw/2, R2 = 0,5(d0 – Dw), k2 = 4.
Допускаемые контактные напряжения [σH] при статическом нагружении для точечного контакта принимают до 5σт, а для линейного – (2÷3) σт, где σт – предел текучести материала. При динамическом нагружении как при первоначальном точечном, так и при первоначальном линейном контактах для незакаленных сталей можно принимать [σH] = (2÷3) σт, а для закаленных – равной части предела контактной выносливости материала σHlim:
Оглавление
Иванов А.С., Муркин С.В. «Конструирование современных мотор-редукторов»
126
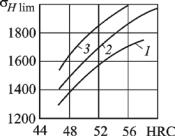
[σH] = σHlim/S, где коэффициент запаса прочности S, принимаемый для материала с однородной структурой равным 1,1, а для материала с неоднородной структурой (например, поверхностная закалка) равным 1,2. Предел контактной выносливости материала σHlim находят по пределу контактной выносливости σHlim0 при числе циклов нагружения 107
_____ |
|
σHlim = σHlim0 6√107/N, |
(Д.5) |
где N – число циклов нагружения опасной точки подшипника. |
|
Значением σHlim0 можно задаваться по графику |
рис. Д.2 [23], |
где кривые: 1 – сталь 45ХН (обработка ТВЧ); 2 – сталь 20Х2Н4А (цементация); 3 – сталь ШХ15 (закалка и низкий отпуск)
Рис. Д.2
Оглавление
Иванов А.С., Муркин С.В. «Конструирование современных мотор-редукторов»