

u_lectures
.pdfЗдесь |
r |
|
|
r |
|
||
|
drM |
|
drA |
|
|||
|
V |
, |
V |
A , |
(4.4) |
||
|
|
|
|||||
|
dt |
M |
|
dt |
|
||
|
|
|
|
|
|
||
|
|
dx |
dy |
|
|
dz |
|
|
di |
|
|
dj |
|
dk |
|
|
d |
|
|
|
|
|
|
|
|
||||||||
dt |
|
dt i |
dt |
j |
dt |
k x |
dt |
y |
dt |
z |
dt |
, |
(4.5) |
|||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx |
dy |
|
dz |
|
|
|
|
|
(4.6) |
|||
|
|
|
Vr |
dt |
i |
dt |
j |
dt |
k |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
– относительная скорость точки М в подвижной системы отсчета Ахуz. Поскольку векторы i , j , k постоянные по модулю ( i j k 1 ), но
меняющие свое направление с угловой скоростью ωe , то согласно (2.18) получим формулы Пуассона:
di |
r |
r |
dj |
r |
r |
dk |
r |
r |
dt |
ωe i ; |
dt |
ωe j ; |
dt |
ωe k . |
|||
|
|
|
|
|
|
|||
Тогда с учетом (4.6), (4.7) и (4.2) выражение (4.5) принимает вид
dρ |
r |
r |
r |
r |
r |
r |
r |
|
|
|
dt |
Vr ωе ix ωе jy ωе kz |
|
||||||||
r |
r |
r |
r |
r |
|
r |
r |
r |
||
|
||||||||||
|
Vr ωе xi |
yj zk |
Vr |
ωе ρ. |
||||||
Подставляя (4.4) и (4.8) в (4.3) получаем
Va VА Vr ωе |
ρ. |
(4.7)
(4.8)
(4.9)
Мысленно остановим относительное движение (Vr 0 ), тогда точка М участвует только в переносном движении вместе телом D, и ее абсолютная скорость равна переносной скорости Va Vе . Подставляя эти условия в (4.9) получаем выражение для переносной скорости точки М:
Ve VА ωе |
ρ. |
(4.10) |
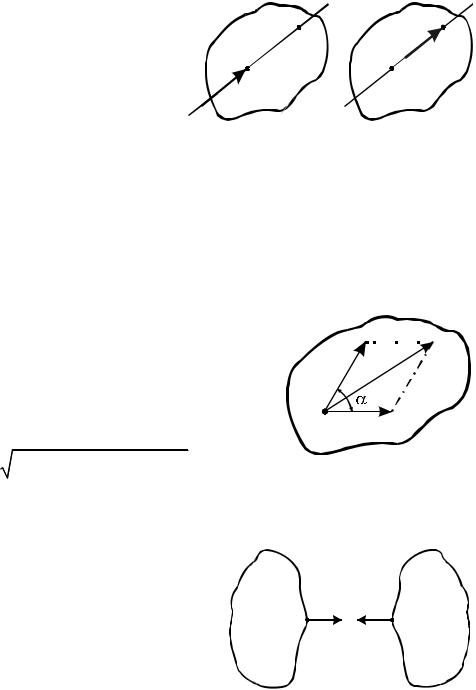
Следовательно, переносная скорость равна скорости точки свободного твердого тела D, с которой в данный момент времени совпадает точка М.
С учетом (4.10) выражение (4.9) принимает вид

Vr |
Va |
Va Vе Vr , |
(4.11) |
|
|
|
|
||
|
|
где вектор абсолютной скорости Va |
определяется |
|
M |
Ve |
|||
диагональю параллелограмма, построенного на |
||||
|
||||
|
|
векторах переносной и относительной скоростей |
||
Рис. 4.3 |
|
как на сторонах (рис. 4.3). Модуль абсолютной |
||
|
|
скорости определяется по теореме косинусов: |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Va |
Ve2 |
Vr2 2Ve Vr cosα , |
(4.12) |
||||||
где угол между векторами Ve |
и Vr . |
|
|||||||||||||||||||||
|
Из (4.12) следуют частные случаи: |
|
|||||||||||||||||||||
1) если = 0, |
Va |
|
|
|
|
|
Ve |
|
|
|
Vr |
|
|
; |
|
(4.13) |
|||||||
|
|
|
|
|
|
|
|
||||||||||||||||
2) |
если = π, |
Va |
|
|
|
Ve |
|
|
|
Vr |
|
; |
|
(4.14) |
|||||||||
|
|
|
|
|
|
||||||||||||||||||
3) |
если = π/2, Va Ve2 Vr2 . |
|
(4.15) |
||||||||||||||||||||
Следовательно, для определения абсолютной скорости необходимо знать модули и направления переносной и относительной скоростей.
Теорема Кориолиса о сложении ускорений
Абсолютное ускорение точки при сложном движении определяется при помощи теоремы Кориолиса: абсолютное ускорение точки равно геометрической сумме переносного, относительного ускорений и ускорения Кориолиса.
Доказательство. Пусть ускорение точки А тела D равно аA , а его угловая скорость и угловое ускорение в данный момент времени соответственно – ωe и εe . Найдем абсолютное ускорение аа точки М,
движущейся относительно тела D. Вычислим производную по времени от равенства (4.9):
dV |
|
|
dV |
|
r |
|
|
r |
r |
|
r |
|
|
dV |
|||
|
|
|
dω |
е |
|
|
dρ |
|
|
||||||||
a |
|
|
A |
|
ρ ωе |
|
|
|
|
r . |
|||||||
|
dt |
|
dt |
dt |
|||||||||||||
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
|||||
Поскольку |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
dV |
|
r |
|
|
dV |
|
r |
|
|
r |
|
|
|
||
|
|
|
|
|
|
dω |
e |
|
|
||||||||
aa |
|
|
a |
, |
aA |
|
|
A , |
εe |
|
|
|
, |
||||
|
|
|
dt |
|
|
||||||||||||
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
||
то с учетом (4.6) и (4.8) имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
r r |
r |
r |
r |
r |
r |
r |
|
d |
dx r |
|
dy |
r |
|
dz r |
|
|
|
|
||||
aa aA |
εe ρ |
ωe Vr |
ωe ρ |
|
|
|
i |
|
|
j |
|
|
k |
|
|
|
|
|||||
dt |
dt |
dt |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
r |
|
|
|||||
r |
r |
r |
r |
r |
r |
r |
r |
|
|
d 2 x r |
|
d 2 y r |
|
d 2 z |
|
|
||||||
aA εe ρ ωe ωe |
ρ |
ωe |
Vr |
dt2 |
i |
dt2 |
j |
dt |
2 |
k |
(4.16) |
|||||||||||
|
r |
|
r |
r |
|
|
|
|
|
|
|
|
|
|
||||||||
dx di |
dy dj |
dz dk . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
dt |
dt |
dt dt |
dt dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как относительное ускорение точки М в подвижной системе координат
Ахуz
|
|
|
|
|
r |
|
d 2 x r |
d 2 y r |
|
|
d 2 z |
r |
|
|
|
|
|
|
|
(4.17) |
||||||
|
|
|
|
|
ar |
dt |
2 |
i |
dt |
2 |
j |
dt |
2 |
k , |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
то, подставляя (4.17), (4.7) в (4.16), получаем |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
r r |
r |
r |
r |
r |
r |
r |
|
|
r |
r |
|
dx r |
|
r |
|
dy r |
|
r |
dz r |
v |
|
|||||
aa aA e e e e Vr |
ar |
dt e |
i |
dt |
e j dt e k |
|
||||||||||||||||||||
r |
r |
r |
r |
r |
r |
r |
|
|
r |
r |
|
r |
|
|
dx r |
|
dy r |
|
dz r |
|
(4.18) |
|||||
aA e e e e Vr ar e |
|
i |
dt |
j |
dt |
k . |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
||||
Поскольку |
|
|
|
|
|
|
dx |
dy |
|
|
|
dz |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
Vr |
dt |
i |
dt |
j |
|
dt |
k |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
то (4.18) принимает вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
aa aA εe ρ ωe ωe ρ ar |
2 ωe Vr . |
|
|
|
|
(4.19) |
||||||||||||||||||
r
Если остановить относительное движение (Vr 0, ar 0 ), тогда абсолютное ускорение точки М равно ее переносному ускорению aa aе . Подставляя эти условия в (4.19), получаем выражение для переносного ускорения точки М:
ae aA εe ρ ωe ωe ρ.
Последнее слагаемое в (4.19) является ускорением Кориолиса:
r
aС 2 ωe Vr .
(4.20)
(4.21)
Следовательно, с учетом (4.20) и (4.21) теорема Кориолиса (4.19) принимает вид
aa aе ar aC , |
(4.22) |

что и требовалось доказать.
Модуль ускорения Кориолиса (4.21) вычисляется по формуле
r |
Vr sin α. |
(4.23) |
aС 2 ωe |
Из (4.23) следуют частные случаи, когда ускорение Кориолиса равно нулю, и абсолютное ускорение точки вычисляется по формуле aa aе ar :
1)aС 0, если ωe 0 , т. е. переносное движение поступательное;
2)aС 0, если Vr 0 , т. е. в точках остановки относительного движения;
3)aС 0, если sin α 0 , т. е. векторы ωе и Vr коллинеарные.
Появление ускорения Кориолиса связано с изменением абсолютной скорости, обусловленным двумя причинами:
1) влиянием переносного движения на относительную скорость (при ωе 0 вектор Vr поворачивается относительно абсолютной системы
координат за счет вращения подвижной системы – тела D);
2) влиянием относительного движения на переносную скорость (при
Vr 0 положение точки в подвижной системе координат изменяется и, следовательно, изменяется переносная скорость).
Согласно определению (4.21) вектор ускорения Кориолиса aС
направлен перпендикулярно плоскости, проходящей через векторы ωе и Vr в
ту сторону, откуда кратчайшее совмещение первого вектора с вторым видно происходящим против хода часовой стрелки (рис. 4.4).
Направление вектора ускорения Кориолиса можно также найти по правилу Жуковского. Для этого следует (см. рис. 4.4):
1) спроецировать вектор
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Vr |
|
|
|
|
|
|
|
|
|
относительной |
скорости |
Vr |
на |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
плоскость |
Q, |
перпендикулярную |
||||
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
a |
C |
|
вектору ωе ; |
|
|
эту проекцию Vr |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
90o |
|
|
|
|
2) повернуть |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
в плоскости Q на |
90 в |
направлении |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Vr |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
переносного вращения ωе . |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
случае, |
когда |
вектор |
|||
|
|
|
|
|
|
|
|
|
|
Рис. 4.4 |
|
относительной |
скорости |
Vr |
лежит |
в |
||||||||
плоскости Q ( |
= 90 ), |
для определения направления вектора aC |
||||||||||||||||||||||
достаточно повернуть вектор Vr в плоскости Q на 90 |
|
|
в сторону |
|||||||||||||||||||||
переносного вращения (по направлению ωе ).
Модуль абсолютного ускорения точки при сложном движении определяется аналитически. Для этого сначала находят модули и

направления векторов aе, ar и aC . Затем проецируют теорему Кориолиса (4.22) на оси неподвиж-ного трехгранника ОХYZ и по найденным проекциям
абсолютного ускорения aaX , |
aaY |
и aaZ |
на эти |
оси вычисляют модуль |
абсолютного ускорения точки |
|
|
|
|
aa |
aaX2 |
aaY2 |
aaZ2 . |
(4.24) |
МОДУЛЬ 2. СТАТИКА
ЛЕКЦИЯ 5. ВВЕДЕНИЕ В СТАТИКУ
Статикой называется раздел механики, в котором излагается учение о силах и исследуются условия равновесия материальных тел, находящихся под действием сил.
Под равновесием понимают состояние покоя тела по отношению
кинерциальной системе отсчета, связанной обычно с неподвижным телом.
Вкачестве модели реального материального тела в статике рассматривается
абсолютно твердое тело тело, расстояние между любыми точками которого не изменяется.
Мерой механического взаимодействия материальных тел является
сила. Сила F векторная величина, действие которой на тело определяется модулем, направлением и точкой приложения.
Прямая линия, вдоль которой направлен вектор F , называется линией действия силы.
Совокупность сил, действующих на тело, называется системой сил. Если линии действия сил лежат в одной плоскости, то система сил называется плоской.
Если линии действия сил не лежат в одной плоскости, то система сил является пространственной. Система сил, линии действия которых пересекаются в одной точке, называется сходящейся.
Две системы сил, оказывающие на тело одинаковое действие,
называются эквивалентными.
Система сил, под действием которой свободное твердое тело находится в покое, называется уравновешенной или эквивалентной нулю.
Аксиомы статики
В основе статики лежат аксиомы экспериментально установленные
|
|
|
|
|
|
законы, справедливость которых |
проверена |
|
|
|
F1 |
||||
|
|
|
практической деятельностью. |
|
|||
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
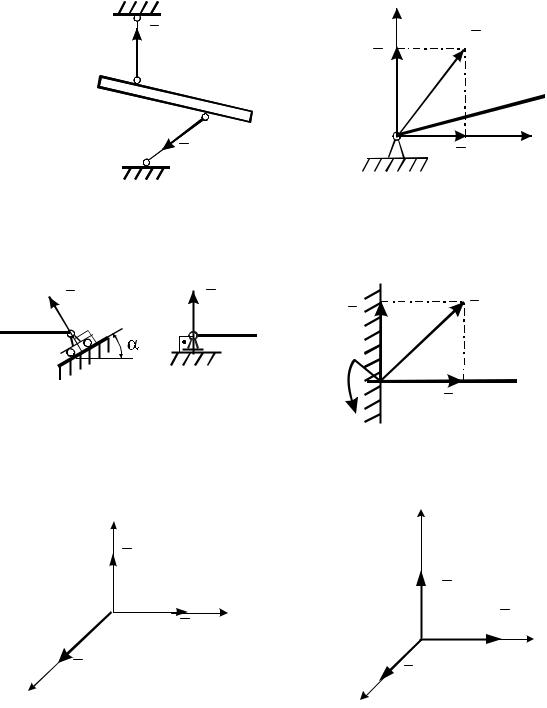
Аксиома 1. Если на свободное абсолютно |
|
|
|
A |
|
|
|
твердое тело действуют две силы, |
то тело |
|
|
|
|
|
может находиться в равновесии только тогда, |
||
|
|
|
|
|
|
||
|
|
|
|
|
|
когда эти силы равны по модулю, и направлены |
|
F2 |
|
|
|
||||
Рис. 5.1
вдоль одной прямой в противоположные стороны (рис. 5.1):
F1 F2 .
Силы F1 и F2 являются уравновешенными.
Аксиома 2. Действие данной
системы сил на абсолютно твердое |
|
|
B |
|
B |
|||||
тело не изменится, если |
к |
ней |
|
|
|
|
|
|
||
A |
|
F |
||||||||
добавить |
или |
отнять |
A |
|||||||
|
|
|||||||||
уравновешенную систему сил. |
|
|
|
|
|
|
|
|||
|
F |
|
|
|
||||||
Следствие. |
Не |
нарушая |
|
|
|
|||||
|
|
|
|
|
|
|||||
состоя-ния твердого тела, силу |
|
|
|
|
|
|
||||
можно переносить по линии ее |
|
|
|
Рис. 5.2 |
|
|
||||
действия в любую точку тела, |
т. е. |
|
|
|
|
|
|
|||
сила вектор скользящий (рис. 5.2).
Аксиома 3. Две силы, приложенные к телу в одной точке, можно заме-нить одной силой, приложенной в той же точке и изображаемой диагональю параллелограмма, построенного на этих силах как на сторонах
(рис. 5.3):
|
R F1 F2 . |
(5.1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Сила R эквивалентная системе сил F1 и F2 |
|
|
|
|
|
|
|
|
|
|
R |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
называется равнодействующей: |
R ~ F1 |
, F2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Модуль ее вычисляется по формуле |
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
F1 |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
R |
F12 F2 |
2 |
2F1F2 cosα , |
(5.2) |
|
|
|
|
|
Рис. 5.3 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где угол между силами F1 и F2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Аксиома 4. Силы, с которыми два |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
тела действуют друг на друга, равны по |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
модулю и направлены по одной прямой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
FA |
FB |
|
|
|
|
|
||||||||||||||
в противоположные стороны (рис. 5.4): |
A |
|
B |
|||||||||||||||||||
FА FВ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Силы FA и |
FB |
|
не |
образуют |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уравновешенную систему сил, так как они |
Рис. 5.4 |
|
приложены к разным телам.
Аксиома 5. Равновесие деформируемого тела не нарушится, если его считать отвердевшим (абсолютно твердым).
Две основные задачи статики. В статике решаются две задачи:

1)задача о приведении системы сил заключается в замене данной системы сил другой, более простой, ей эквивалентной;
2)задача о равновесии состоит в определении условий, при которых система сил, приложенная к телу, будет уравновешенной системой.
Связи и их реакции
Тело, перемещениям которого в пространстве препятствуют какиенибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все, что ограничивает перемещение данного тела в пространстве, называется связью.
Сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям, называется реакцией связи. Реакция связи направлена в сторону противоположную той, куда связь не дает перемещаться телу.
Одним из основных положений теоретической механики является
принцип освобождаемости от связей: несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив их действие реакциями связей.
В статике этот принцип позволяет рассматривать равновесие несвободного твердого тела как свободного, находящегося под действием активных (заданных) сил и реакций связей.
N
A
A 




NC TA


 TB
TB
 B
B  C
C  A B
A B
 A
A
|
|
|
|
|
|
|
|
|
NB |
||
|
|
|
|||
|
NA |
||||
Рис. 5.5 |
|
|
|
|
Рис. 5.6 |
|
|
|
|
|
|
Рассмотрим наиболее часто встречающиеся типы связей и направления их реакций.
1.Гладкая плоскость (поверхность) или опора. Реакция N гладкой плоскости (поверхности) или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена в этой точке (рис. 5.5).
2.Гибкая нить (провода, канаты, цепи, ремни). Реакция Т нити направлена от тела вдоль нити к точке подвеса (рис. 5.6).
3.Невесомый стержень с шарнирами. Реакция N шарнира направлена
вдоль невесомого стержня. Обычно реакция N изображается от тела по стержню в предположении, что в равновесии стержень растянут (рис. 5.7).
4. Неподвижный цилиндрический шарнир (подшипник). Реакция RA
цилиндрического шарнира лежит в плоскости Аху перпендикулярной оси
шарнира и может иметь любое направление. Обычно RA раскладывают в |
|||||||
точке А на две взаимно перпендикулярные составляющие ХA и YA (рис. 5.8). |
|||||||
|
|
NA |
|
|
y |
|
|
|
|
|
|
|
R |
|
|
|
|
A |
|
|
YA |
A |
|
|
|
|
|
|
|
||
|
|
|
B |
|
A |
|
x |
|
|
|
NB |
|
XA |
|
|
|
|
|
|
|
|
||
|
|
Рис. 5.7 |
|
|
|
Рис. 5.8 |
|
|
RB |
|
RB |
|
Y |
RA |
|
|
B |
|
B |
|
A |
|
|
|
|
Рис. 5.9 |
|
mA |
A |
XA |
|
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
Рис. 5.10 |
|
|
|
1 |
z |
3 |
|
z |
1 |
|
|
|
|
|
|
|
||
|
ZA |
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
y |
|
ZA |
|
||
|
|
|
|
|
|
||
|
|
A |
YA |
|
A |
Y |
y |
|
|
|
|
A |
|
||
x |
XA |
|
|
|
X |
3 |
|
|
|
|
|
A |
|
|
|
|
|
Рис.5.11 |
|
|
Рис. 5.12 |
|
|
|
|
|
|
|
|
||
5. Шарнирно-подвижная опора (опора на катках). Реакция RВ |
|||||||
проходит через ось шарнира В и направлена перпендикулярно к опорной |
|||||||
поверхности (рис. 5.9). |
|
|
|
|
|
||
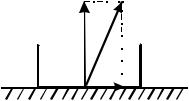
6.Жесткая заделка. Нахождение реакции жесткой заделки сводится
копределению составляющих ХA и YA препятствующих линейному
перемещению точки А балки в плоскости действия активных сил и алгебраической величины реактивного момента mA, препятствующего вращению балки под действием заданных сил (рис. 5.10).
7. Сферический шарнир. Сферическим шарниром называется устройство (рис. 5.11), которое допускает сферическое движение тела 3 вокруг неподвижной точки А центр внутренней сферы 1, с которой жестко скреплено рассматриваемое тело 3. При условии, что сферическая
поверхность идеально гладкая, реакция RА направлена в точке А по нормали к этой поверхности. Обычно на схемах реакцию RА сферического шарнира раскладывают на три взаимно перпендикулярные составляющие ХA , YA , ZA ,
неизвестные по величине.
8. Подпятник. Подпятник (рис. 5.12) представляет собой соединение цилиндрического шарнира 2 с опорной плоскостью 3, на которую опирается
вал 1. Реакция подпятника складывается |
из реакции цилиндрического |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
подшипника, которая раскладывается в плоскости |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
перпендикулярной |
его |
оси |
на |
две |
взаимно |
|
N |
R |
|||||||||||||||
|
перпендикулярные |
составляющие |
ХA |
и YA , и |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
нормальной реакции ZA |
опорной плоскости 3. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
9. Шероховатая неподвижная поверхность. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Реакция шероховатой поверхности представляет |
|||||
|
|
|
Fтр |
|
|
|
|||||||||||
|
|
|
|
|
|
собой равнодействующую R |
силы нормальной |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Рис. 5.13 |
|
|
|
реакции N и силы трения Fтр |
(рис. 5.13). |
|
||||||||||
Проекция силы на ось и на плоскость
С математической точки зрения описание сил в статике эквивалентно описанию векторов в векторной алгебре. Рассмотрим основные положения.
Проекцией силы F на ось называется алгебраическая величина равная произведению модуля силы на косинус угла между вектором силы и
положительным направлением оси: |
|
|
|
Fx F cosα, |
(5.3) |
где F модуль силы F ; α |
угол между вектором F |
и положительным |
направлением оси х. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|||
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
2 |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Fx |
0 |
|
|
|
|
Fx 0 |
|
|
Fx |
0 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
в |
|
||||
|
|
|
|
|
|
|
|
|
|
Рис. 5.14 |
|
|
|
|
|
|
|
|
|
|
||||
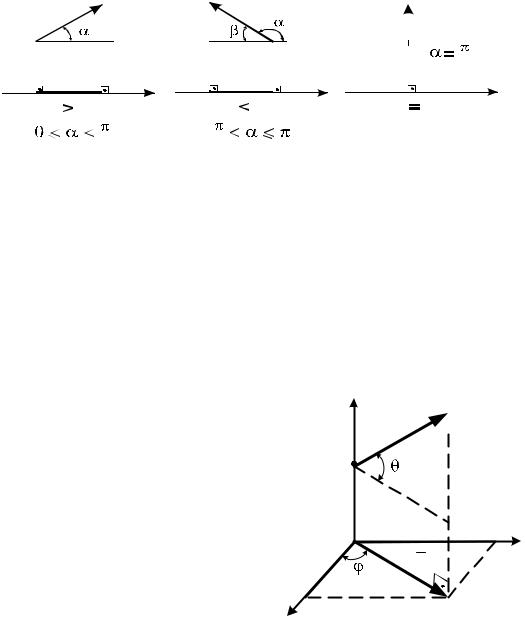
Проекция силы является: |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
1) положительной ( Fx |
0 ), если угол α острый (рис. 5.14, а); |
|
||||||||||||||||||||||
2) отрицательной ( Fx |
0 ), если угол α |
тупой (рис. 5.14, б), так как |
||||||||||||||||||||||
Fx F cosα F cos 180о β F cosβ; |
|
|
|
|
|
|
|
|
|
|||||||||||||||
3) равняется нулю ( Fx 0 ), если угол α |
π |
(рис. 5.14, в). |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
Проекцией силы |
|
F на плоскость |
|
z |
|
|
|
|
B |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Оху называется |
|
|
вектор |
Fху ОВ1 , |
|
|
F |
|
|
|||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
заключенный |
между |
проекциями |
A |
|
|
|
|||||
начала |
и |
конца |
силы |
F |
на |
эту |
|
|
|
||
|
|
|
|
||||||||
плоскость (рис. 5.15), где |
Fху |
F cosθ. |
|
Fy |
B3 |
y |
|||||
В |
|
случае |
|
произвольной |
O |
||||||
ориентации |
силы |
в пространстве |
ее |
F |
F |
|
|
||||
проекцию на координатные оси обычно |
|
|
|||||||||
x |
xy |
|
|
||||||||
определяют |
|
методом |
|
двойного |
B2 |
|
B1 |
|
|||
проецирования. |
|
Сначала |
силу |
x |
|
|
|||||
проецируют на одну из координатных |
|
Рис. 5.15 |
|
|
|||||||
осей |
(например |
ось |
z) |
и |
на |
|
|
|
|||
|
|
|
|
||||||||
координатную |
плоскость |
двух других |
|
|
|
|
|||||
осей (на Оху), проекция силы на плоскость Fху является вектором, который
затем проецируют на оси координат Ох и Оу, расположенные в плоскости
(рис. 5.15):
Fх ОВ2 Fху cos F cosθ cos ,
Fy ОВ3 Fху sin F cosθ sin ,
Fz F sin θ .
Аналитический способ задания силы