

u_lectures
.pdfПриравнивая правые части (11.19) и (11.16), находим коэффициент жесткости с эквивалентной пружины
c c1 c2 . |
(11.20) |
Обобщая (11.20) на случай n параллельно соединенных пружин, коэффициент жесткости с эквивалентной пружины можно вычислить по формуле
n |
|
c cк. |
(11.21) |
к 1
2. Если тело М подвешено к двум последовательно соединенным пружинам жесткости
c1 и c2 (рис. 11.5, а), то эту
систему пружин заменяем одной эквивалентной пружиной с жесткостью c (рис. 11.3).
В положении статического равновесия О ( x 0 на рис. 11.5, б) для системы последовательно соединенных пружин величину ее полной статической деформации
δст вычислим по формуле
δст δ1ст
c1 |
l0 |
c1 |
|
|
|
|
c2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
M |
c2 |
|
|
1ст |
F |
|
|
|
||||
|
|
|
ст |
2ст |
1ст |
|
|
|
|
M |
F2ст |
||
|
|
|
|
|||
|
|
|
|
|
O |
m |
|
|
|
|
|
|
P |
|
|
|
|
|
x |
|
|
а |
Рис. 11.5 |
|
б |
||
|
|
|
|
|||
δ2ст , |
(11.22) |
где δ1ст, δ2ст величины статических деформаций (удлинений) данных пружин жесткостью c1 и c2 соответственно. Согласно (11.16) величины статических деформаций (удлинений или сжатий) пружин под действием силы P равны:
δ |
ст |
|
P |
, |
δ |
|
P |
, |
δ |
2ст |
|
P |
. |
(11.23) |
|
|
|
||||||||||||
|
|
c |
|
1ст |
|
c1 |
|
|
c2 |
|||||
|
|
|
|
|
|
|
|
|
|
|||||
Подставляя (11.23) в (11.22) и сокращая найденное равенство на величинуP , находим
1 |
1 |
1 |
|
|
||
c |
|
|
|
|
. |
(11.24) |
c |
c |
|||||
|
1 |
2 |
|
|
||

Величины, обратные коэффициентам жесткости, называются
коэффициентами податливости.
Следовательно, при последовательном соединении пружин податливость эквивалентной пружины равна сумме податливостей данных пружин.
Из (11.24) найдем коэффициент жесткости с эквивалентной пружины:
c |
c1c2 |
|
||
|
|
. |
(11.25) |
|
c |
c |
|||
1 |
2 |
|
|
|
Если обобщить формулу (11.24) на случай n последовательно |
||||
соединенных пружин с коэффициентами жесткости |
c1, c2 , ..., cn , то |
|||
коэффициент жесткости с эквивалентной пружины можно вычислить, используя формулу
1 |
n 1 |
|
||
c |
к 1 |
|
. |
(11.26) |
cк |
||||
В дальнейшем при решении задач о колебании тела М на произвольной системе параллельно и последовательно соединенных пружин заменяем их одной эквивалентной пружиной с коэффициентом жесткости с, который определяем применением формул (11.21), (11.26) в зависимости от вида их соединения.
Затухающие колебания точки
Рассмотрим материальную точку М массой m, движущуюся прямолинейно вдоль неподвижной оси Ох под действием восстанавливающей силы
F и силы вязкого сопротивления среды R μV , которая направлена противоположно вектору скорости V точки М (рис. 11.6).
Тогда |
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
x |
||
|
|
F R |
M |
|
V |
||||||||||||
|
|
|
|
||||||||||||||
Rx μVx |
μx&, |
(11.27) |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 11.6 |
|
|
|
|
|
|||||||||||
где μ коэффициент |
|
|
|
|
|
|
|
|
|||||||||
пропорциональности, характеризующий |
вязкость |
||||||||||||||||
среды. Запишем основное уравнение динамики точки в проекции на ось Ох:
max Fx Rx
или
& |
cx |
|
& |
(11.28) |
mx |
|
μx . |
Разделив (11.28) на m и введя обозначение
k 2 |
|
c |
, |
2b |
μ |
, |
(11.29) |
||||
|
m |
||||||||||
|
|
|
m |
|
|
|
|
|
|
||
представляем уравнение (11.28) в виде |
|
|
|
|
|
|
|
||||
& |
|
& |
k |
2 |
x |
|
0 , |
(11.30) |
|||
x |
|
2bx |
|
|
|||||||
где параметр b характеризует влияние сопротивления среды на движение материальной точки.
Уравнение (11.30) называется дифференциальным уравнением свободных колебаний при линейно-вязком сопротивлении.
Будем искать решение линейного однородного дифференциального уравнения второго порядка с постоянными коэффициентами (11.30) в виде
x e t . Подставляя это решение в (11.30) и разделив найденное уравнение на e t 0 , получаем характеристическое уравнение
2 2b k2 0 ,
корни которого вычисляем по формуле
1,2 b |
b2 k2 . |
(11.31) |
Из (11.31) следует, что в зависимости от соотношений между k и b общее решение уравнения (11.30) имеет разный характер.
1. Если b k (сопротивление мало), то корни (11.31)
характеристического уравнения различные и комплексные
1,2 b i |
k2 b2 . |
В этом случае общее решение дифференциального уравнения (11.30) имеет вид
|
|
|
( b i |
k2 b2 )t |
( b i |
k2 b2 )t |
|
|
(11.32) |
|||||
|
|
x C1 e |
|
|
|
|
C2e |
|
|
|
|
|
||
Перейдем в (11.32) от постоянных интегрирования |
C1* и |
C2* к новым |
||||||||||||
постоянным C1 и C2 по формулам: |
|
|
|
|
|
|
|
|
|
|||||
|
|
C1* |
C1 C2 |
, |
|
C2* C1 |
C2 . |
|
|
(11.33) |
||||
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
Подставляя (11.33) в (11.32), получаем |
|
|
|
|
|
|
|
|||||||
x e |
bt |
|
k |
2 |
b |
2 |
t C2 sin k |
2 |
b |
2 |
|
|
(11.34) |
|
|
C1 cos |
|
|
|
|
t . |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для наглядности в решении (11.34) перейдем от C1 и C2 к другим постоянным A и α по формулам
C1 =A sinα, |
C2 A cosα. |
(11.35) |
Тогда подставляя (11.39) в (11.38), получаем общее решение уравнения
(11.30) в виде
x Ae bt sin |
k2 b2 t α . |
(11.36) |
Колебания, происходящие по закону (11.36), называются затухающими.
Постоянные интегрирования A и α можно определить, используя начальные условия движения точки (11.5). В (11.36) величина
k* |
k2 b2 |
(11.37) |
называется циклической частотой затухающих колебаний.
Наличие в решении (11.36) множителя e bt приводит к тому, что с
течением времени амплитуда Ae bt этих колебаний убывает, стремясь к нулю.
Период Т затухающих колебаний вычисляем по формуле:
T |
2π* |
|
2π |
. |
(11.38) |
|
k2 b2 |
||||||
|
k |
|
|
|
Для моментов времени 0, T , 2T , 3T и т. д. амплитуда колебаний (11.36)
принимает соответствующие значения A , Ae bT , Ae 2bT , Ae 3bT и т. д. Следовательно, размахи колебаний (11.36) будут убывать по закону
геометрической прогрессии, знаменатель которой |
e bT называется |
декрементом колебаний, а величина ln e bT bT |
логарифмическим |
декрементом.
Сравнивая значения частот (11.8), (11.37), и периодов (11.12), (11.38),
можно сделать вывод, что наличие линейно-вязкого сопротивления, приводит к уменьшению частоты и увеличению периода свободных колебаний точки.
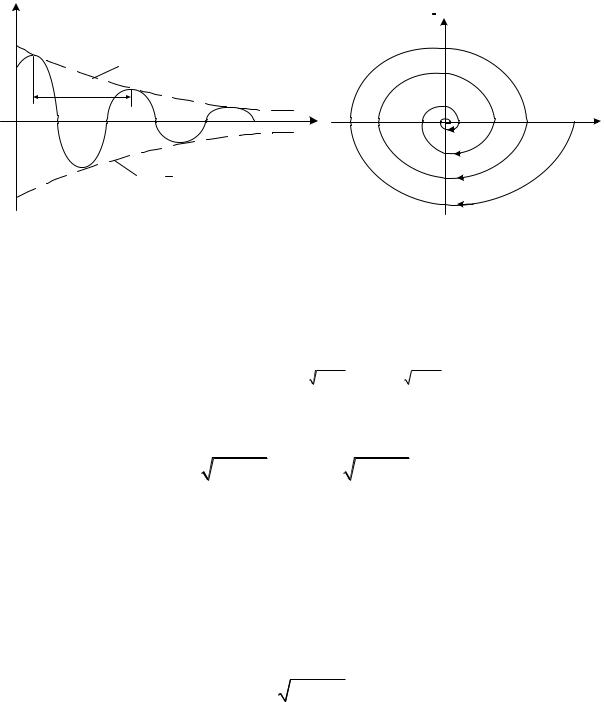
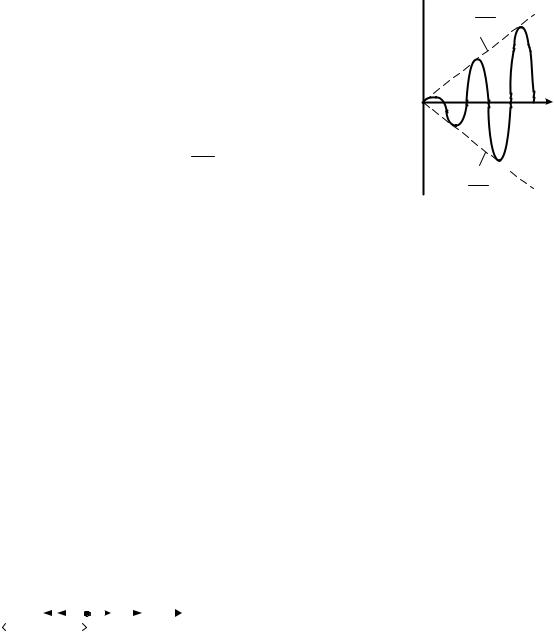
График затухающих колебаний (11.36) материальной точки приведен на рис. 11.7, а, а график ее фазовой траектории на рис. 11.7, б.
На рис. 11.7, б видно, что при затухающих колебания изображающая точка с течением времени стремится к началу координат О на фазовой плоскости.
x |
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x0 |
* |
x = Ae bT |
|
|
|
|
|
|
|
|
|
|
|
t |
|
О |
|
|
x0 |
x |
|
О |
|
|
|
|
|
|
||||
|
|
x = Ae bT |
|
|
|
|
|
|
|
|
|
|
а |
|
Рис. 11.7 |
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
Если |
b k (сопротивление |
велико), |
то корни (11.31) |
вещественные |
|||||
и различные. В этом случае |
общее решение |
уравнения |
(11.30) |
запишем |
||||||
в виде |
|
|
|
|
|
|
|
|
|
|
x C1*e 1t |
C2*e 2t |
e bt C1*e b2 k2 t C2*e |
b2 k2 t . |
(11.39) |
||||||||
или, используя (11.33), находим |
|
|
|
|
|
|
|
|
||||
x e |
bt |
|
2 |
k |
2 |
t C2sh |
b |
2 |
k |
2 |
|
(11.40) |
C1ch b |
|
|
|
|
t . |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Перейдем от C1 |
и C2 к постоянным интегрирования |
A и α, полагая, |
||||||||||
что |
|
C1=A shα, |
C2 |
A chα . |
|
|||||||
|
|
(11.41) |
||||||||||
Подставляя (11.41) в (11.40), находим вид общего решения (11.39) для рассматриваемого случая
x Ae btsh |
b2 k2 t α . |
(11.42) |
Из вида зависимости (11.42) координаты х от времени t следует, что движение материальной точки в случае большого сопротивления среды ( b k ) не носит колебательного характера, и точка M под действием восстанавливающей силы будет постепенно (асимптотически) приближаться к положению равновесия О.
Следовательно, в случае большого сопротивления движение точки является апериодическим движением.
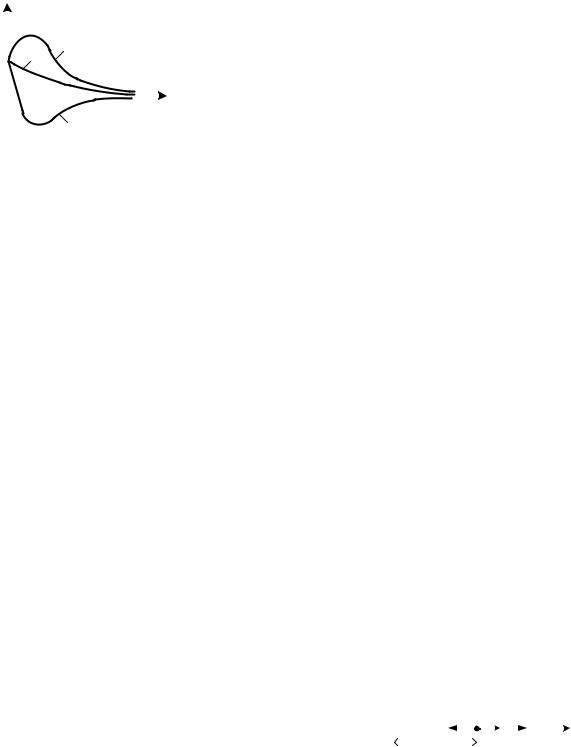
Очевидно, что при известных начальных условиях движения точки
t 0 |
x(0) x |
0 |
0, |
x&(0) x& V |
возможные |
графики |
апериодического |
||||
|
|
|
|
|
|
0 0 |
|||||
x |
|
|
|
|
|
|
движения (11.42), |
приведенные на |
рис. 11.8, |
||
|
|
|
|
|
|
зависят от величины и направления начальной |
|||||
|
|
|
|
|
|
|
|||||
x 0 |
2 |
1 |
|
|
|
скорости V0 точки: |
|
|
|
||
|
|
|
t |
кривая 1 соответствует V0 0 |
; |
|
|||||
O |
|
|
|
|
|
||||||
|
|
|
|
кривая 2 отражает случай V0 0 и величина |
|||||||
|
3 |
|
|
|
|||||||
|
|
|
|
|
|||||||
|
|
|
|
|
начальной скорости не велика; |
|
|||||
|
|
Рис. 11.8 |
|
|
кривая 3 соответствует V0 0 |
, но величина |
|||||
|
|
|
|
начальной скорости велика. |
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
|
2. Если |
b k , то корни |
(11.31) характеристического |
уравнения |
|||||||
вещественные и кратные 1,2 b . Тогда общее решение уравнения (11.30) имеет вид уравнения апериодического движения
x e bt C1* C2*t . |
(11.43) |
Для различных величин и направлений начальной скорости V0 точки М
возможные графики апериодического движения (11.43) будут качественно аналогичны графикам, изображенным на рис. 11.8.
ЛЕКЦИЯ 12
Вынужденные колебания точки при отсутствии сопротивления
Рассмотрим прямолинейное движение материальной точки М масссой m вдоль неподвижной оси Ох под действием восстанавливающей силы F
(11.1) и возмущающей силы H (рис. 12.1), изменяющейся по гармоническому закону
|
H x H0 sin ωt , |
|
|
|
|
|
|
|
|
|
|
(12.1) |
|||
где H0 амплитуда, а ω частота возмущающей силы. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Запишем основное уравнение динамики |
|
|
|
|
|
|
|
|
|
|
|
|
|||
точки в проекции на ось Ох: |
|
O |
|
|
|
|
|
|
|
||||||
|
F |
M |
|
|
H |
x |
|||||||||
|
V |
||||||||||||||
max Fx H x |
|
|
|
x |
|
|
|
|
|
|
|
|
|
||
|
|
|
Рис. 12.1 |
|
|
|
|
|
|
|
|||||
или с учетом (1) и (43) |
|
|
|
|
|
|
|
|
|
|
|||||
|
mx& cx H0 sin ωt . |
|
|
|
|
|
|
|
|
|
|
(12.2) |
|||
Разделим (12.2) на m и оставим в правой части только слагаемое, зависящее от времени t, введя обозначения
k 2 |
c |
, |
h |
H0 |
(12.3) |
|
|||||
|
m |
0 |
m . |
||
Тогда исходное уравнение (44) принимает вид |
|
||||
|
&x k2 x h0 sin ωt , |
(12.4) |
|||
Уравнение (12.4) называется дифференциальным уравнением вынужденных колебаний при отсутствии сопротивления.
Из теории дифференциальных уравнений известно, что решение уравнения (12.4) можно записать в виде суммы общего решения x1 однородного
дифференциального уравнения (11.3) и частного решения x2 исходного неоднородного уравнения (12.4), т. е.
x x1 x2 . |
(12.5) |
Согласно (11.7) запишем общее решение однородного дифференциального уравнения (11.3)
x1 Asin(kt α) . |
(12.6) |
Частное решение x2 неоднородного уравнения (12.4) зависит от вида правой части этого дифференциального уравнения.
1. Если частота возмущающей силы H не равна собственной частоте свободных колебаний ( ω k ), то частное решение уравнения (12.4) будем искать в виде
x2 Bsin ωt , |
(12.7) |
где постоянную интегрирования B можно определить подстановкой решения (12.7) в исходное уравнение (12.4). Для этого дважды дифференцируя по времени (12.7)
&x Bp2 sin ωt |
(12.8) |
2 |
|
и подставляя (12.7) и (12.8) в (12.4), получаем |
|
Bp2 sin ωt k2 B sin ωt h sin ωt |
|
0 |
|
или |
|
(k2 p2 )Bsin ωt h0 sin ωt . |
(12.9) |
Приравнивая коэффициенты, стоящие при функции sin ωt в левой и правой частях равенства (12.9), имеем
(k2 ω2 )B h0 ,
откуда находим
B |
|
|
h0 |
|
|
. |
(12.10) |
k |
2 |
|
ω |
2 |
|||
|
|
|
|
|
С учетом (12.10) частное решение (12.7), соответствующее вынужденным колебаниям точки, принимает вид
x2 |
|
|
h0 |
|
|
sin ωt . |
(12.11) |
k |
2 |
|
ω |
2 |
|||
|
|
|
|
|
Подставляя (12.7) и (12.11) в (12.5), получаем общее решение дифференциального уравнения (12.4) вынужденных колебаний при отсутствии сопротивления:
x A sin(kt α) |
|
|
h0 |
|
|
sin ωt , |
(12.12) |
k |
2 |
|
ω |
2 |
|||
|
|
|
|
|
где постоянные интегрирования A и α определяем по начальным условиям движения точки (11.5).
Из (12.12) следует, что колебания точки являются сложными, которые складываются из собственных колебаний с амплитудой А и частотой k и вынужденных колебаний с амплитудой В и частотой ω, совпадающей с
частотой возмущающей силы H .
2. Если частота возмущающей силы H равна собственной частоте колебаний ( ω = k ), то имеет место явление резонанса неограниченного возрастания амплитуды вынужденных колебаний.
В этом случае частное решение x2 дифференциального уравнения
(12.4) следует искать в виде |
|
x2 Bt cosωt . |
(12.13) |
Определим величину постоянной В. Для этого вычислим |
|
&x 2Bω sin ωt Btω2 cosωt |
. |
(12.14) |
|
2 |
|
||
Подставляя решение (12.13), |
выражение (12.14) и k ω |
в исходное |
|
дифференциальное уравнение (12.4), получаем |
|
|
|
2Bω sin ωt ω2Bt cosωt ω2 Bt cosωt h0 sin ωt . |
(12.15) |
||
Приведя подобные слагаемые в (12.15) и приравнивая коэффициенты при sin ωt в левой и правой частях этого равенства, определяем коэффициент
B |
h0 |
. |
(12.16) |
|
|||
|
2ω |
|
|
Подставляя (12.16) в (12.13), находим закон вынужденных колебаний при резонансе при отсутствии сопротивления:
x2 2h0ωt cosωt .
Используя формулы приведения, окончательно получаем
x2 |
h t |
|
ωt |
π |
||
0 |
sin |
|
. |
|||
2ω |
2 |
|||||
|
|
|
|
|||
x2 |
x = |
h0t |
|
2 |
|
|
2 |
|
O |
|
t |
|
|
x2= - 2h0t
Рис. 12.2
(12.17)
Из (59) следует, что при резонансе амплитуда вынужденных колебаний возрастает пропорционально времени (рис. 12.2), а сдвиг фазы
вынужденных колебаний по отношению к фазе возмущающей силы H равен
π/ 2 .
Вынужденные колебания точки при вязком сопротивлении
Рассмотрим прямолинейное движение точки М массой m вдоль неподвижной оси Ох (рис. 12.3). Пусть на нее действуют восстанавливающая
сила F (11.1), сила сопротивления R (11.27) и возмущающая сила H , изменяющаяся по гармоническому закону
|
|
|
|
|
|
|
|
|
|
|
|
|||
O F |
R M |
|
|
H |
x |
|
H x H0 sin(ωt δ) , |
(12.18) |
||||||
V |
|
|||||||||||||
|
x |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
Рис. 12.3 |
|
|
|
|
|
где |
H0 амплитуда, ω частота, |
||||||
|
|
|
|
|
|
δ |
начальная фаза возмущающей силы. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Запишем основное уравнение динамики точки в проекции на ось Ох:
max Fx Rx H x
или с учетом зависимостей (11.1), (11.27) и (12.18)
mx& x& cx H0 sin(ωt δ) . |
(12.19) |
Разделив (12.19) на m и введя обозначения |
|
k 2 |
c |
, |
2b |
μ |
, |
h |
H0 |
, |
(12.20) |
|
m |
m |
|||||||||
|
|
|
|
0 |
m |

запишем дифференциальное уравнение (12.19) в |
виде |
&x 2bx& k2 x h0 sin(ωt δ) . |
(12.21) |
Уравнение (12.21) называется дифференциальным уравнением вынужденных колебаний при линейно-вязком сопротивлении.
Из теории дифференциальных уравнений известно, что решение уравнения (12.21) следует записать в виде суммы общего решения x1
однородного дифференциального уравнения (11.30) и частного решения x2 исходного неоднородного уравнения (12.21), т. е.
x x1 x2 . |
(12.22) |
|
Ограничимся рассмотрением |
случая малого |
сопротивления среды |
( b k ). Тогда согласно (11.36) |
|
|
x1 Ae bt sin |
k2 b2 t α . |
(12.23) |
Частное решение x2 будем искать, исходя из вида правой части уравнения (12.21):
|
|
|
x2 B sin(ωt δ β) , |
(12.24) |
|||
где B |
и β |
|
|
|
|
& |
и |
|
постоянные интегрирования. Для их определения вычислим x2 |
||||||
&x2 : |
|
|
x& |
ωB cos(ωt δ β), |
|
|
|
|
|
|
|
|
|||
|
|
|
2 |
|
|
|
|
|
|
|
&x |
ω2 Bsin(ωt |
δ β). |
|
|
|
|
|
2 |
|
|
|
|
|
Подставляя найденные выражения |
x&2 , &x2 и решение |
(12.24) |
в |
|||
уравнение (12.21), получаем |
|
|
|
|
|||
|
|
|
ω2 Bsin(ωt δ β) 2bωB cos(ωt δ β) |
(12.25) |
|||
|
|
|
k2 Bsin(ωt δ β) h sin(ωt δ). |
||||
0
Полагая ωt δ β γ и используя соотношение
sin(ωt δ) sin(γ β) sin γ cosβ cos γ sinβ,
запишем (12.25) в виде