

2.6. Способ профильных нормалей
Данный способ применяется для нахождения огибающей семейства плоских кривых. Движение плоской кривой в ее плоскости в общем случае является плоскопараллельным (плоским). Если известно положение мгновенного центра скоростей (МЦС), т. е. точки

скорость которой в рассматриваемый момент времени равная нулю, то плоское движение в этот момент времени можно представить, как вращение относительно МЦС. В частном случае, плоская кривая может совершать вращение вокруг всегда неподвижной точки.
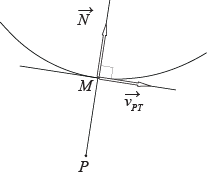
При вращении плоской кривой вокруг МЦС, скорость любой ее точки перпендикулярна радиусу вращения. Принимая во внимание, что

можно утверждать, что любая составляющая скорости

в том числе и скорость точки плоской кривой должна быть также перпендикулярна

Отсюда следует, что вектор, нормальный к плоской кривой, в точке контакта должен проходить через МЦС.
Рассмотрим такой процесс формообразования поверхности детали резанием, когда инструмент и заготовка обкатываются параллельно некоторой плоскости. Относительное движение любого звена сводится к перекатыванию без скольжения некоторой кривой, связанной с этим звеном по некоторой другой кривой, связанной со вторым звеном. Эти кривые носят названия центроид.Т. к. в точке контакта центроиды не проскальзывают друг относительно друга, то можно утверждать, что каждая является геометрическим местом МЦС при перекатывании по ней другой центроиды.
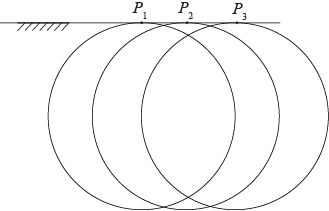
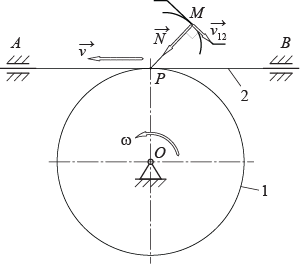
Перекатывание прямой по окружности.

Обратное перекатывание‑ окружности по прямой.
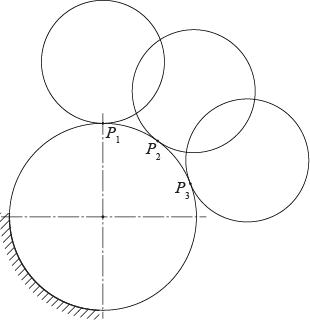
Перекатывание одной окружности по другой окружности.
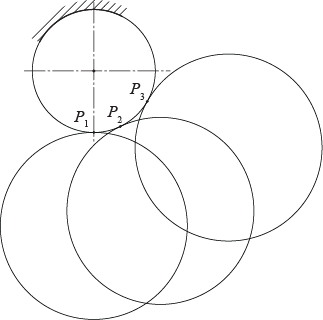
Обратное перекатывание, т. е. перекатывание второй окружности по первой окружности.
Во всехэтихслучаяхинструмент и заготовка представляют собой механизм, аналогичный механической передаче, но с принудительным движением звеньев.
Реечная передача.
Цилиндрическая передачавнешнегозацепления.
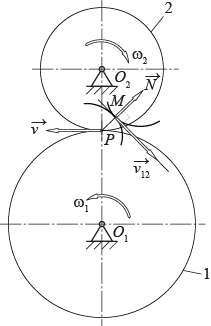
Цилиндрическая передачавнутреннегозацепления.

В реечной передаче центроиды называют начальной прямой и начальной окружностью. В цилиндрической передаче центроиды называются начальными окружностями. Точка

касания начальных кривых (прямой и окружности или двух окружностей) называется полюсом зацепления. Скорости прямолинейно-поступательного и вращательного движений звеньев считаем постоянными.
В каждый момент времени в передаче полюс зацепления совпадает с одним из МЦС в относительном движении звеньев передачи. Очевидно, что


где

‑ это угловая скорость вращения первого звена,

‑ это угловая скорость вращения второго звена,

‑ это радиус начальной окружности первого звена,

‑ радиус начальной окружности второго звена,

‑ передаточное отношение передачи.
В полюсе зацепления относительная скорость точки контакта начальных кривых равна 0:

Полюс зацепления лежит на межцентровой линии и делит ее на отрезки, отношение которых обратно пропорционально отношению угловых скоростей звеньев передачи.
При постоянных скоростях прямолинейно-поступательного и вращательного движений начальных кривых полюс зацепления будет занимать всегда одно и то же положение.
Применительно к рассматриваемым передачам справедливо утверждение: вектор, нормальный к плоской кривой в точке контакта с другой плоской кривой, должен проходить через точку контакта соответствующихцентроид, т. е. через полюс зацепления.
Вектор относительной скорости точки контакта плоских кривых

согласно уравнению контакта

перпендикулярен отрезку, соединяющему точку контакта и полюс зацепления.