2.10.3.Формообразование прямолинейного профиля шлицев шлицевого вала долбяком
Рассмотрим случай зацепления долбяка и шлицевого вала с прямолинейным профилем. Радиусы начальных окружностей долбяка и вала соответственно обозначим

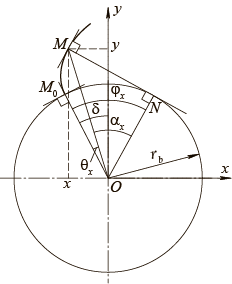
Допустим, что начало координат находится в центре долбяка– точке

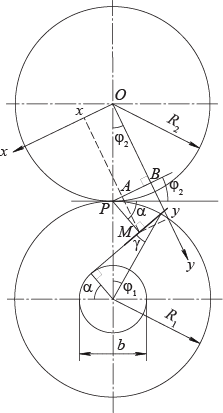
Полюс зацепления, лежащий на начальной окружности долбяка, является точкой его профиля, сопряженного с профилем детали.При повороте детали по часовой стрелке на угол

система координатдолбякавместе с его начальной окружностью повернется на угол

Нормаль

к профилю детали должна являться одновременно и нормалью к профилю долбяка. Поэтому, учитывая, что

координаты точки

профиля долбяка можно найти следующим образом:


С учетомтого, что

получаем


Выведенные уравнения являются уравнениями профиля долбяка, выраженные через угол поворота детали. При расчете профиля долбяка необходимо отслеживать, чтобы ордината не выходила за пределы наружного диаметра долбяка.
Как и в случае обработки червячной фрезой, начальная окружность не может быть принята произвольной. При выборе начальной окружности следует стремиться к уменьшению последней, однако если ее величина меньше определенного критического значения, то это может привести к срезу вершины профиля детали. Отыскание этого критического значения и является задачей определения оптимальной начальной окружности.
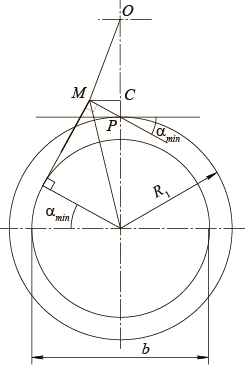

Учитывая, что для критического положения

получаем






откуда следует, что

Сучетомвыражения

имеем

Также имеем

С учетом того, что


получаем





откуда следует, что
Переходная кривая при нарезании долбяком всегда больше чем при нарезании червячной фрезой.
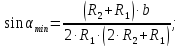
Минимальный угол поворота долбяка, при котором осуществляется формообразование:

2.11. Формообразование эвольвентного профиля
2.11.1.Геометрические параметры эвольвенты
Эвольвента окружности, в дальнейшем эвольвента –плоская кривая, которую описывает точка прямой при перекатывании без скольжения по некоторой окружности, называемой основной.
Из самого способа образования эвольвенты следует, что отрезок

перпендикуляренэвольвенте и равендуге

т. е.

где

‑ это радиус основной окружности;

‑ это т. н. угол развернутости;

‑ угол профиля в рассматриваемой точке;

‑ т. н. эвольвентный угол, который, с учетом того, что

определяется следующим образом:

Если считать параметром

то параметрические уравнения эвольвенты в полярной системе координат имеют следующий вид:

Если считать параметром

то параметрические уравнения эвольвенты в декартовой системе координат примут вид


где

2.11.2.Геометрические параметры цилиндрическогоэвольвентногоколеса с внешними зубьями
У цилиндрического эвольвентного колеса различают поверхность выступов, определяемую радиусом выступов

поверхность впадин, определяемую радиусом впадин

боковые поверхности зубьев, очерченные по эвольвентам, а также некоторые другие поверхности, такие как галтели и т. п.

Шаг зубьев

задают на т. н. делительной окружности радиуса

следующимобразом:

где

‑ это модуль, значения которого стандартизированы.
Принимаявовнимание, что

получаем, что шаг зубьев на окружности радиуса

т. е.

где

‑ это шаг зубьев на основной окружности.
Имеем:

где

‑ это количество зубьев, откуда следует, что

Толщина зуба колеса на делительной окружности определяется следующим образом:

где

‑ это т. н. коэффициент изменения толщины зуба.
Если данный коэффициент равен 0, то колесо называется нулевымили колесом с равноделенным шагом; если он меньше 0, то колесо с внешними зубьями называется отрицательным, а колесо с внутренними зубьями – положительным; если коэффициент изменения толщины зуба больше 0, то колесо с внешними зубьями называется положительным, а колесо с внутренними зубьями – отрицательным. Данный коэффициент зависит от установки режущего инструмента относительно обрабатываемого колеса.
Толщина зуба колеса на окружности произвольного радиуса

определяется следующим образом:

Учитывая, что


получаем