

8. Итерация симплекс–метода
Пусть
 такие номераi,
k:
такие номераi,
k:
 и
и .
В силу того, что
.
В силу того, что ,
а
,
а ,
то знач. цел. ф-ции будет увел.
,
то знач. цел. ф-ции будет увел.
Т.о. выбирается
s( )
такой, что
)
такой, что .
Эл.
.
Эл. наз.
ведущим (разрешающим),i-ая
строка и k-ый
столбец – ведущими (разрешающими). В
качестве знач. перем.
наз.
ведущим (разрешающим),i-ая
строка и k-ый
столбец – ведущими (разрешающими). В
качестве знач. перем.
 .
Пост.
.
Пост. по
ф-лам
по
ф-лам след.обр.:
след.обр.: ,
, ,
, ,
, ,
, ,
…,
,
…, ,
, ,
, .
.
 ,
т.е. n-r
коорд. нулев.
Не равн. 0 коорд. имеют инд.: 1,...,s-1,s+1,…,
r,
k.
Рассм.лин.комб.
,
т.е. n-r
коорд. нулев.
Не равн. 0 коорд. имеют инд.: 1,...,s-1,s+1,…,
r,
k.
Рассм.лин.комб.
 (*).
Покажем, что (*) может принимать знач. =0
только при усл., что все
(*).
Покажем, что (*) может принимать знач. =0
только при усл., что все
 .
Рассм.
.
Рассм.
 ,
тогда (*) предст. в виде:
,
тогда (*) предст. в виде:
 .
Последняя сумма предст. собой лин. комб.
ЛНЗ векторов
.
Последняя сумма предст. собой лин. комб.
ЛНЗ векторов
 ;
; ,
, .
След-но, вектора стоящие при базисных
коорд. точк.
.
След-но, вектора стоящие при базисных
коорд. точк. - ЛНЗ.
- ЛНЗ.
 ,
где
,
где
 ,
,
Выражая из s-го ур-ния
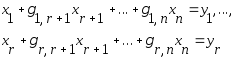 (**)
знач. перем.
(**)
знач. перем.
 и подставляя полученное выражение в
остальные ур-ния (**) получим зависимость
между базисными и небазисными коорд.
точк.
и подставляя полученное выражение в
остальные ур-ния (**) получим зависимость
между базисными и небазисными коорд.
точк.
9. Обоснование конечности симплекс – алгоритма.
Алгоритм решения з. оптимизации назыв. Конечным, если для его реализации на компе требуется конечное число операций для нахождения оптимального плана.
ЗЛП невырожденная, если все угловые точки мн-ва Х невырожденные.
Теор. Если в невырожд. ЗЛП известна какая-либо угл. т-ка, то отправляясь от нее либо б. найден оптимальный план, либо б. показано, что цел. Ф-я неограниченна и для этого понадобится конечное число итераций.
Док-во.
Пусть у – угл. т-ка мн-ва Х. Т.к. ЗЛП
невырожд., то
 .
Разрешающий эл-т
.
Разрешающий эл-т .
Если не вып. достат. усл-е оптимальности
.
Если не вып. достат. усл-е оптимальности ,
то
,
то
Т.е. переход к др.
угловой точке происходит со строгим
возрастанием, а
 достигается только в 1 строчке, т.е. выбор
координаты, выводимой из базиса
однозначный. Число угл. т-к конечно. Из
всего этого следует конечность
симплекс-алгоритма.
достигается только в 1 строчке, т.е. выбор
координаты, выводимой из базиса
однозначный. Число угл. т-к конечно. Из
всего этого следует конечность
симплекс-алгоритма.
Зам:Если задача ЛП явл вырожденной, то в сл выбора вырожд угл точки х может произойти зацикливание, которое будет явл следств, изменения базиса вырожд угл точки.
10. Обоснование непустоты мн-ва планов в ЗЛП. Пример.

 (1)
(1)
Рассм след вспомог
задачу: Введем в рассм искусств перемен
 ,
(
,
( )=y≥0.
Т.к. мн-во
)=y≥0.
Т.к. мн-во
 :
: (2)
(2)
И рассм задачу: (3)
(3)
В покоординатной форме ограничения (2) им след вид
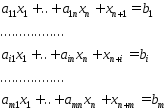
Замеч:
1).
Если вектор
 ,то
система основных ограничений(2)переходит
в
сис-му
основных
ограничений
(1)
,то
система основных ограничений(2)переходит
в
сис-му
основных
ограничений
(1)
2).
Мн-во
 ,
т.к.
,
т.к.
3).
Т.
 явл. угловой точкой мн-ваZ
с базисом
явл. угловой точкой мн-ваZ
с базисом

4).
Целев ф-ия
 ,
т.о. зад (3) – есть ЗЛП в канонической
форме, к кот удобно применить симплекс
метод, при этом в силу огр-ти целев ф-ии
наZ
зад (3) обяз-но им решение.
,
т.о. зад (3) – есть ЗЛП в канонической
форме, к кот удобно применить симплекс
метод, при этом в силу огр-ти целев ф-ии
наZ
зад (3) обяз-но им решение.
Непустота мн-ва планов
Пусть
 -
реш зад (3) и
-
реш зад (3) и знач
целев ф-ии зад (3).
знач
целев ф-ии зад (3).
Возможны 2 случая:
1.
 ;2.
;2.

Теорема: Если
 ,
то
,
то угловая точка этого мн-ва.
угловая точка этого мн-ва.
Док-во:1)Это означает, что вектор y*,..,z* имеет строгополож координаты, тогда мн-во Х явл пустым. Действ, если мн-во Х пустым не явл, то в этом мн-ве найдется некоторая точка y, Ay=b, y≥0. Но тогда т z’=(y,0)пренад Z,а знач цел.ф в ней =0, что против предполож о том , что т z*явл решением задачи.
2)Рассм
случай, когда
 из подстановки в зад (3) полагаем, что
из подстановки в зад (3) полагаем, что и в силу того, что
и в силу того, что .
.
Покажем, что
 -угловая
точкаX:
-угловая
точкаX:
 .
Построим точки
.
Построим точки тогда
тогда , но
, но
 -
угловая точка мн-ва Z,
решение ЗЛП (3), полученное симплекс
методом
-
угловая точка мн-ва Z,
решение ЗЛП (3), полученное симплекс
методом
 послед
рав-во возможно, когда
послед
рав-во возможно, когда -угловая
точка мн-ваX.
-угловая
точка мн-ваX.