

bmp
.pdf161
У загальному випадку для n раз статично невизначуваної рами система канонічних рівнянь складається з n рівнянь
|
|
|
|
|
11 |
X |
1 |
|
12 |
X |
2 |
... |
1n |
X |
n |
|
|
0; |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1P |
|
|
|
|
|
||||||||||||
|
|
|
|
|
21 X1 |
|
22 X 2 ... 2n X n |
2P 0; |
|
|
(10.4) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
..... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
X |
1 |
|
|
n2 |
X |
2 |
... |
nn |
X |
n |
|
|
nP |
0. |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Коефіцієнти ik при невідомих |
– це переміщення в основній системі в напрямку сили Xi від |
|||||||||||||||||||||||||||||||||
дії одиничної сили X k 1 ; |
ik Xk |
|
– |
|
переміщення |
в |
напрямку |
сили |
Xi від дії |
невідомої |
||||||||||||||||||||||||
узагальненої сили |
X k . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Коефіцієнт iP , |
|
який |
називається |
|
вантажним, або вільним членом системи канонічних |
|||||||||||||||||||||||||||||
рівнянь, є переміщенням в напрямку сили |
|
Xi основної системи від |
дії заданого зовнішнього на- |
|||||||||||||||||||||||||||||||
вантаження. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переміщення ik |
та iP |
(і = 1, 2, 3, ... , n) |
обчислюються |
за формулою Мора, яка для рам має |
||||||||||||||||||||||||||||||
вигляд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ik |
MEIi M k dx, |
|
|
|
|
|
|
iP |
MEIi M P dx, |
(i, k=1,2,…n). |
(10.5) |
|||||||||||||||||||||||
|
|
j 1 |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j 1 |
|
|
L |
|
|
|
|
|
|
|
|
|
|||
У формулах (10.5) позначено: |
|
|
i |
|
та |
|
k |
– згинальні моменти в елементах основної системи |
||||||||||||||||||||||||||
|
M |
|
M |
|||||||||||||||||||||||||||||||
від дії сили Xi 1та сили |
X k 1 , |
відповідно, |
M P |
|
– згинальні моменти в елементах основної сис- |
|||||||||||||||||||||||||||||
теми від дії заданого навантаження, j – номер ділянки інтегрування (j =1, 2, ..., m). |
|
|||||||||||||||||||||||||||||||||
Таким чином, |
для обчислення коефіцієнтів |
|
|
ik |
|
|
|
та вільних членів iP |
системи канонічних |
|||||||||||||||||||||||||
рівнянь необхідно в основній системі рами побудувати епюри згинальних моментів окремо від дії одиничних навантажень в напрямку кожного невідомого методу сил та від заданого навантаження. Так, епюра M1 будується в основній системі від дії лише сили X1 1. Епюра M1 називається
одиничною епюрою, а відповідний стан рами – одиничним станом. Загальне число одиничних станів відповідає кількості невідомих методу сил. Епюра M P будується в основній системі рами від заданого навантаження. Цей стан рами називається вантажним станом.
У системі лінійних алгебраїчних рівнянь методу сил (10.4) діагональні члени додатньо визначені ( ii 0 ). Коефіцієнти, розташовані симетрично відносно головної діагоналі, на основі теореми про взаємність переміщень попарно однакові ij ji . Таким чином, матриця, складена з коефіцієнтів при невідомих системи канонічних рівнянь методу сил, завжди симетрична.
162
Отже коефіцієнти системи канонічних рівнянь є переміщеннями, а саме: кути повороту при виборі основних систем утворених постановкою шарнірів, та поступальні переміщення при основних системах, побудованих усуненням кінематичних в’язей (ідеальних стержнів).
Розв’язком системи канонічних рівнянь є величини зусиль у вилучених в’язях заданої рами. Інші сили взаємодії дисків між собою та внутрішні зусилля в них можуть бути визначеними з умов рівноваги при розрахунку основної системи на дію зовнішнього навантаження та знайдених зусиль у умовно знятих зайвих в’язях. Цей спосіб визначення внутрішніх зусиль в заданій рамі отримав назву статичного способу. З іншого боку, маючи значення основних невідомих методу сил, внутрішні зусилля в заданій рамі можна обчислити шляхом додавання (накладення) епюр за схемою
Мд М1 X1 |
М2 X2 |
... Мn Xn MP, |
|
Qд Q1 X1 |
Q2 X2 |
... Qn Xn QP, |
(10.6) |
Nд N1 X1 |
N 2 X2 |
... N n Xn NP. |
|
Тут Mд, Qд, Nд – дійсні зусилля в заданій статично невизначуваній рамі; M i ,Qi , Ni |
(i=1, 2, ..., |
||
n) – внутрішні зусилля, в i-му одиничному стані основної системи; MР,QР, NР – внутрішні зусил-
ля у вантажному стані основної системи рами; Xi (i=1, 2, ..., n) – значення основних невідомих ме-
тоду сил.
Для підтвердження достовірності отриманих результатів розрахунку виконуються дві перевірки епюр дійсних внутрішніх зусиль: кінематична і статична. Кінематична перевірка полягає у визначенні переміщень у заданій рамі, які заздалегідь відомі (наприклад, дорівнюють нулю). Будь-яке узагальнене переміщення обчислюється за формулою Мора
kд MEIk Mд dx, |
(10.7) |
де kд – переміщення в заданій статично невизначуваній рамі в напрямку k-ї в’язі; Mд – дійсні згинальні моменти в рамі.
Для побудови епюри M k вихідна рама замінюється довільною основною системою (при створенні якої серед знятих n умовно зайвих в’язей має бути k-та), яка завантажується узагальненою одиничною силою в напрямку вилученої k-ї в’язі.
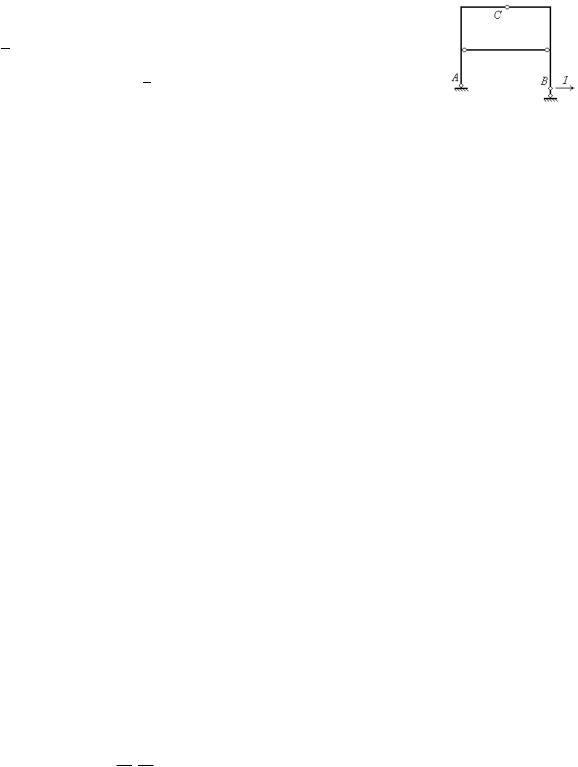
Наприклад, для обчислення горизонтального переміщення опори В статично невизначуваної системи (рис.10.5,а) можна використати варіант основної системи, показаний на рис.10.5,б. Одиничний стан, що відповідає горизонтальному переміщенню точки В, зображений на рис.10.6.
163
Для перевірки усіх ділянок епюри Mд необхідно визначати такі переміщення в заданій рамі і вибирати такі варіанти основних систем, при яких епюра Mk була б на всіх стержнях рами. Часто для виконання цієї
вимоги використовують епюру M , побудовану в основній системі від одночасної дії декількох (не обов’язково всіх) одиничних узагальнених сил.
При виконанні кінематичної перевірки Mд похибка, як правило, не повинна перевищувати кількох відсотків.
Статична перевірка полягає в перевірці виконання умов рівноваги всіх вузлів рами та рівноваги рами в цілому. Кожен вузол рами умовним замкненим перерізом, який перетинає всі
стержні, поєднані ним, відокремлюється від |
рами і перевіряються умови його рівноваги: |
M 0 , Fx 0 , Fy 0 (з урахуванням |
заданих зовнішніх вузлових сил і моментів). |
Вважається, що переріз знаходиться нескінченно близько біля вузла. Значення внутрішніх сил у перерізах беруться з епюр дійсних згинальних моментів, поперечних та поздовжніх сил.
Перевірка епюри поперечних сил Qд виконується по епюрі |
Mд , виходячи з диференційної |
||||
залежності між поперечними силами та згинальними моментами |
|
||||
Qд x |
d M |
д x |
. |
(10.8) |
|
d x |
|||||
|
|
|
|||
Виконання умов рівноваги рами в цілому перевіряється шляхом відокремлення її від “землі”. При цьому замкнений переріз слід провести через усі опорні пристрої рами. В рівняння рівноваги поряд із зовнішнім навантаженням включають і опорні реакції, які визначаються по епюрах Mд ,
Qд , Nд .
Розрахунок симетричних рам має деякі особливості. Найбільш трудомісткою частиною розрахунку рам методом сил є формування системи канонічних рівнянь. Суттєвого спрощення можна досягти, якщо не визначати коефіцієнти системи рівнянь ij , які завідомо дорівнюють нулю. Для симетричних рам (симетричні зовнішня геометрія та жорсткості) при виборі симетричної основної системи коефіцієнти ik M i M k EI dx дорівнюють нулю тоді, коли одна з епюр-множників
EI dx дорівнюють нулю тоді, коли одна з епюр-множників
буде симетричною, а інша – кососиметричною.
Епюра згинальних моментів в симетричній рамі буде симетричною (кососиметричною), якщо навантаження, що діє на раму, буде симетричним (кососиметричним).
У більшості випадків навантаження, що діє на симетричну раму не є симетричним або кососиметричним. Таке навантаження називається навантаженням загального вигляду. В таких випадках
164
основні невідомі методу сил також є невідомими загального вигляду, але, використовуючи так звану процедуру групування невідомих, їх можна привести до симетричних та кососиметричних і цим досягти того, щоб епюри згинальних моментів в одиничних станах були симетричними або кососиметричними.
Групування невідомих здійснюється так, щоб однотипні невідомі Xi та X j , розташовані в си-
метричних точках основної системі, були б замінені сумою і різницею інших двох невідомих Yi , Y j
Xi |
Yi |
Yj |
, |
(10.9) |
|
X j |
Yi |
Yj . |
|||
|
|||||
Така заміна можлива для будь-яких двох чисел, наприклад, числа 5 і 7 можна записати як суму та різницю чисел 6 і 1 (7 = 6+1; 5 = 6–1).
а |
б |
в |
г |
д |
|
Рис. 10.7 |
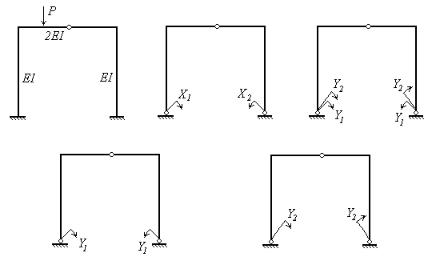
Для прикладу на рис.10.7,а показана симетрична двічі статично невизначувана рама.
Вибрана основна система (рис.10.7,б) симетрична. Основні невідомі X1 і X2 загального вигля-
ду (епюри згинальних моментів від кожного з них не є симетричними або кососиметричними).
Замінимо невідомі загального вигляду X1 та X2 іншими невідомими Y1 та Y2 , які були б відповідно симетричними та кососиметричними (рис.10.7, в)
X1 Y1 Y2 ,
X2 Y1 Y2.
У подальшому в систему рівнянь методу сил включають невідомі Y1 (рис.10.7,г) – симетричний одиничний стан; та Y2 (рис.10.7,д) – кососиметричний одиничний стан.
Система канонічних рівнянь методу сил в цьому разі має вигляд
|
|
|
|
|
|
|
|
|
165 |
|
Y |
Y |
|
0, |
(10.10) |
||||
|
11 |
1 |
|
12 |
2 |
1p |
0. |
||
|
Y |
22 |
Y |
|
2 p |
|
|||
|
21 |
1 |
|
2 |
|
|
|
||
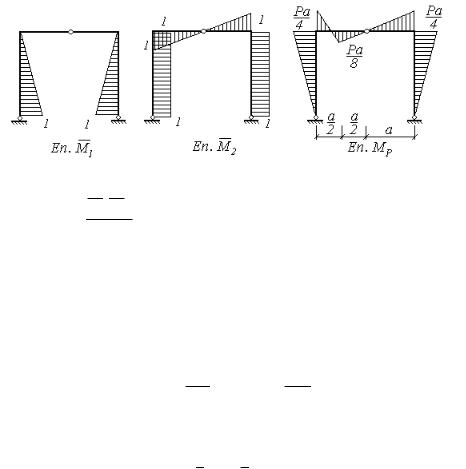
Для обчислення коефіцієнтів і вільних членів системи канонічних рівнянь будуються епюри згинальних моментів в одиничних і вантажному станах (рис.10.8).
Рис. 10.8
Враховуючи |
|
|
|
|
EI |
|
|
|
|
|
|
|
|
12 |
21 |
|
M 1 M 2 dx 0, |
система рівнянь (10.10) набуває вигляду |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
0; |
|
(10.11) |
|||
|
|
|
|
|
|
11 1 |
1P |
0. |
|
||||
|
|
|
|
|
|
|
Y |
|
|
2P |
|
|
|
|
|
|
|
|
|
22 2 |
|
|
|
|
|||
Звідки видно, що |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Y |
1P , |
|
Y |
2P . |
||||
|
|
|
|
|
1 |
|
|
11 |
|
2 |
|
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Тоді
Mд M1Y1 M2Y2 M p .
Наслідком групування основних невідомих є те, що система канонічних рівнянь розпадається на дві підсистеми: до однієї входять симетричні, до другої – кососиметричні основні невідомі. Якщо зовнішнє навантаження симетричне, то вантажні члени системи рівнянь кососиметричної групи будуть нульовими, а тому й всі основні невідомі, що входять до відповідної підсистеми, будуть теж дорівнювати нулю (тривіальний розв’язок системи однорідних лінійних рівнянь).
Те ж станеться і з симетричною групою основних невідомих у випадку, коли зовнішнє навантаження кососиметричне.
Таким чином завдяки процедурі групування невідомих вдається зменшити кількість розв’язувальних рівнянь методу сил.
166
10.2. Розрахунок рами методом сил
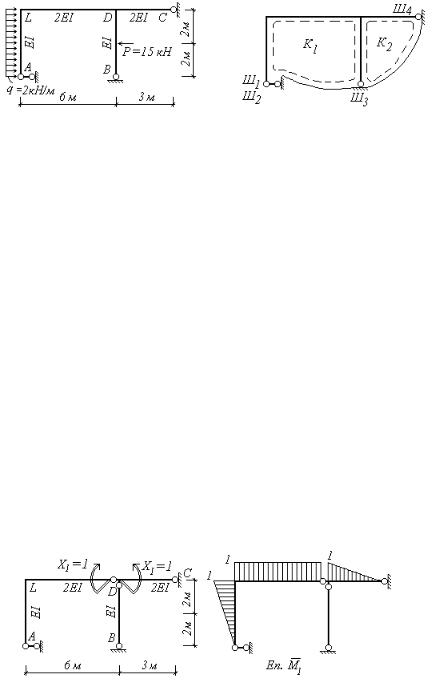
Дано: розрахункова модель (рис.10.9,а). Необхідно: побудувати епюри внутрішніх зусиль.
а |
б |
Рис. 10.9
Розв’язування:
1) По формулі (10.2) обчислюється ступінь статичної невизначуваності (рис.10.9,б) n 3K Ш 3 2 4 2 .
2) Шляхом вилучення двох умовно зайвих в’язей утворюється основна система методу сил. На рис.10.10,а-г показано чотири варіанти основних систем.
Для подальшого розрахунку приймається варіант, зображений на рис.10.10,б. 3) Система канонічних рівнянь методу сил
|
|
11 |
X |
1 |
|
12 |
X |
2 |
|
|
0, |
|
|
|
|
|
1p |
|
|||||
|
21 |
X |
1 |
|
22 |
X |
2 |
|
2 p |
0. |
|
|
|
|
|
|
|
|
|||||
Для обчислення коефіцієнтів при невідомих ik |
(i, k = 1,2) і вільних членів iP (i = 1,2) буду- |
||||||||||
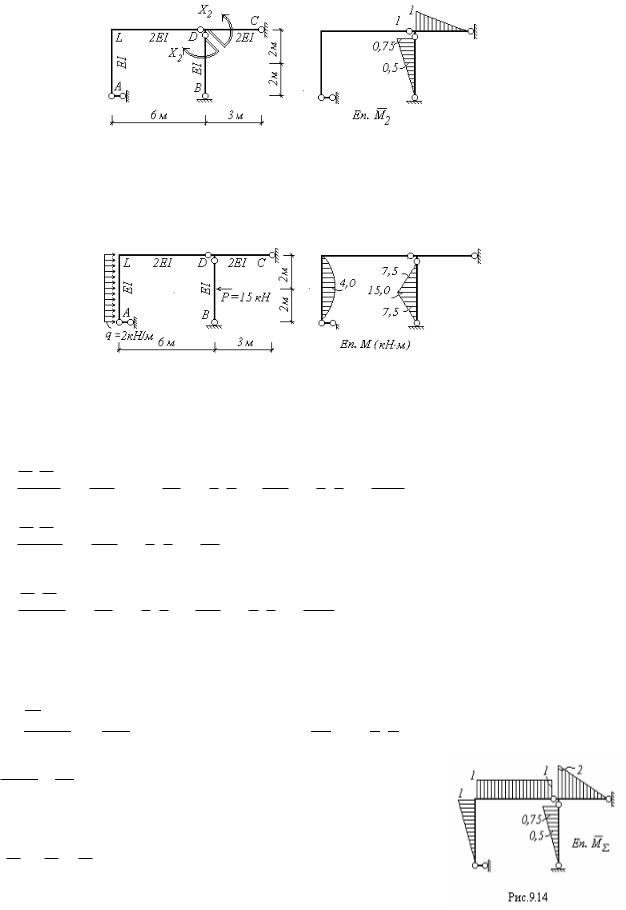
ються для основної системи рами епюри згинальних моментів для першого (рис.10.11) і другого (рис.10.12) одиничних станів та для вантажного стану (рис.10.13).
а |
б |
Рис.10.11
167
а |
б |
Рис.10.12
а |
б |
Рис.10.13
Інтегрування в формулі Мора (10.5) виконується чисельно за правилом Верещагіна або по формулі Сімпсона-Корноухова
11 MEI1 M 1dx 21EI 1 6 1 EI1 1 4 12 23 1 21EI 1 3 12 23 1 4,EI833;12 MEI1 M 2 dx 21EI 1 3 12 23 1 0EI,5 ;
22 M EI2 M 2 dx EI1 1 4 12 23 1 21EI 1 3 12 23 1 1,EI833 ;
1P MEI1MP dx 6EI4 0 4 0,5 4 0 5,333EI ;
2P MEI2MP dx 6EI2 0 4 0,75 7,5 15 0,5 EI1 15 2 12 23 0,5
10 5 15 .
EI EI
Для перевірки коефіцієнтів системи канонічних рівнянь будується епюра М М1 М2 , шляхом складання ординат епюр моментів в одиничних станах у відповідних точках (рис.10.14).
168
Суть перевірки полягає в альтернативному обчисленні коефіцієнтів у відповідності з формула-
ми
1 |
М1 М |
dx |
|
|
М |
|
1 М1 M2 |
dx |
|
М1 М1 |
dx |
М1 М2 |
dx 11 |
12 ; |
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
EI |
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
EI |
|
|
EI |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
2 |
|
М |
М |
|
|
|
|
|
М |
М |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx 21 |
22 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
M |
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
P |
|
|
М |
dx |
P |
М |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx P1 |
P2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Отже, маємо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 |
|
М1 М |
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
2 |
|
|
|
|
1 |
1 6 1 |
1 |
|
1 |
|
|
2 |
|
|
5,333 |
; 11 |
12 |
|
|
1 |
4,833 |
0,5 |
5,333 |
|
||||||||||||||||
|
|
|
|
|
|
|
dx |
|
|
|
|
1 |
|
4 |
|
|
|
1 |
|
|
|
|
|
|
|
2 3 |
|
|
1 |
|
|
|
|
|
|
. |
||||||||||||||||||||
|
|
|
EI |
2 |
|
|
3 |
2 |
2 |
2 |
3 |
EI |
EI |
EI |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Перевірка коефіцієнтів при невідомих першого рівняння 1 1i (i=1, 2) підтверджує пра-
вильність їх визначення.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
М2 М |
|
1 |
|
|
2 |
|
|
1 |
|
2 |
2,333 |
|
|||||||||
2 |
|
|
|
1 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
dx |
|
|
|
1 |
4 |
|
1 |
|
|
|
|
2 |
3 |
|
1 |
|
; |
|
EI |
|
2 |
3 |
2 |
2 |
3 |
EI |
|||||||||||||||||
|
|
EI |
|
|
|
|
|
|
|
|
|
|||||||||||||
21 22 EI1 0,5 1,833 2,EI333 .
Перевірка вільних членів
|
|
|
|
M |
|
|
|
|
|
1 |
4 |
|
|
|
|
|
1 |
|
|
|
9,667 |
|
|||
P |
|
P |
М |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
dx |
|
|
|
0 |
4 4 |
0,5 |
1 0 |
|
14 4 |
0,5 |
|
|
, |
||||||
|
|
EI |
|
6 |
2 |
EI |
|||||||||||||||||||
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
1 |
5,333 |
15 |
9,667 |
, |
|
|
|
|
|
|
|
|
|||||||||
2P |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
1P |
|
|
|
EI |
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Отже, P iP .
Виконання перевірок підтверджує правильність визначення коефіцієнтів та вільних членів системи канонічних рівнянь, яка після помноження на EI лівої та правої частини кожного з рівнянь набуває вигляду
4,83X1 |
0,5X2 5,33 0, |
||
|
0,5X1 1,833X2 15 |
0. |
|
|
|||
Розв’язком системи є: |
X1 2,01; X2 |
8,73. |
|
Слід перевірити розв’язок системи рівнянь підстановкою коренів в кожне з них або в сумарне рівняння.
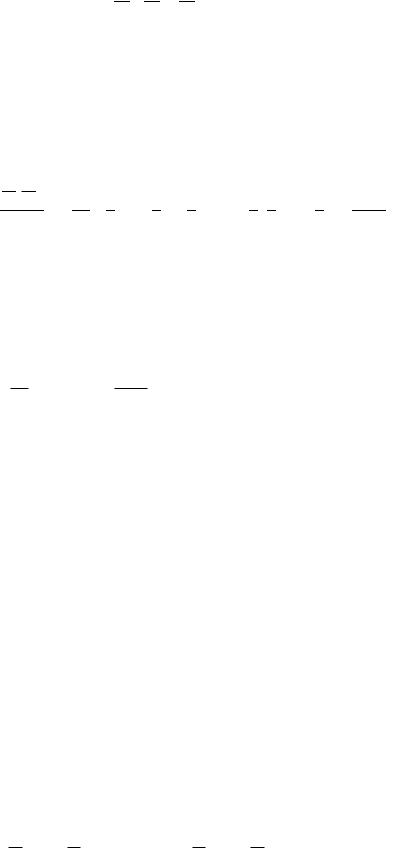
4)Побудова епюри дійсних згинальних моментів
ММ1 Х1 М2 Х2 МР 2,01М1 8,73М2 МР .
169
Всі складові (парціальні) епюри та результат показано на рис.10.15.
Рис.10.15
5) Статична перевірка епюри дійсних згинальних моментів. Перевірка виконання умов рівноваги вузлів D та L (рис.10.16):
МD 8,73 2,01 6,72 0 ,
Рис. 10.16
МL 2,01 2,01 0 .
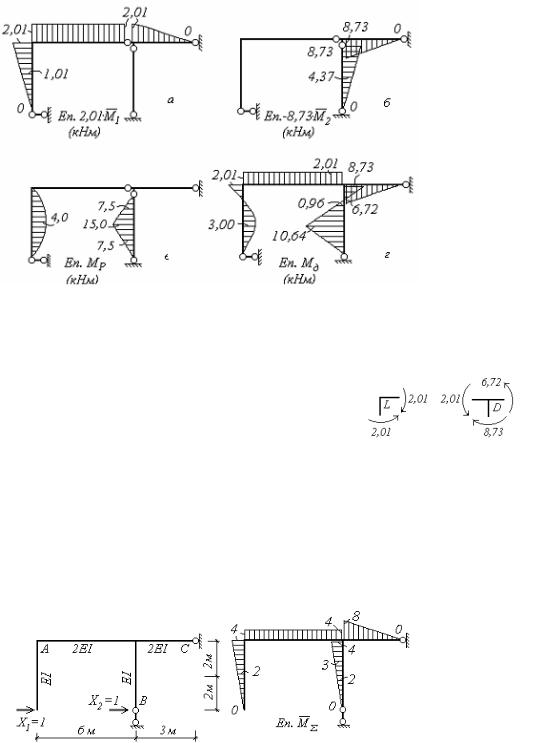
6)Кінематична перевірка епюри дійсних згинальних моментів. Для виконання кінематичної (основної) перевірки використовується альтернативна основна система (рис.10.17,а). Переміщення
внапрямках X1 та X2 в заданій рамі дорівнює нулю. Контрольна епюра згинальних моментів
(рис.10.17,б) охоплює всі стержні рами, тому є раціональною.
а |
б |
Рис. 10.17

170
д |
М Mд dx |
4 0 |
4 2 3 2,01 4 |
1 2,01 6 4 |
|
|
k |
EI |
|
6EI |
|
2EI |
|
6 23EI 6,72 8 4 3,36 4 0 6EI2 4 8,73 4 3 0,96 2 10,64 |
||||||
1 |
2 0,5 1 |
2 |
10,64 |
10,64 24,12 26,88 0,706 14,19 |
|
|
EI |
2 |
3 |
|
|
EI |
|
38,31 38,226 |
0,084 |
0. |
|
|
||
|
EI |
|
EI |
|
|
|
Відносна похибка становить
0,08438,31 100% 0,22% .
7)Для побудови епюри дійсних поперечних сил можна використати диференційну залежність (10.8). Похідна обчислюється виходячи з її геометричної суті – тангенс кута нахилу дотичної до графіку функції моментів, побудованої на осі стержня.
На ділянках з прямолінійними епюрами моментів значення похідної (поперечної сили) постійне (рис.10.18,а,б)
Рис.10.18
Q |
|
|
10,64 |
5,32(кН) ; |
Q |
|
10,64 8,73 |
9,68(кН) ; |
|||||
BF |
|
|
|
|
|||||||||
|
2 |
|
|
|
FD |
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
Q |
|
|
6,72 |
|
2,24(кН) ; |
Q |
|
0 , (функція M |
|
– постійна) . |
|||
DC |
|
LD |
LD |
||||||||||
|
3 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
Поперечна сила має знак "+", якщо кут нахилу епюри моментів відраховується від осі стержня по напрямку руху годинникової стрілки, в іншому разі поперечна сила від’ємна.
На ділянці стержня, де графік згинального моменту є параболою, поперечна сила є лінійною функцією. Для побудови її епюри необхідно знати дві ординати, які можна обчислити з умов рівноваги вилученої ділянки AL (рис.10.18,в)
M A 0 : |
QLA 4 2,01 |
2 4 2 0; |
QLA 4,5 (кН) , |
Fx 0 : |
QAL QLA |
2 4 0; |
QAL 3,5 (кН) . |
Епюра дійсних поперечних сил показана на рис.10.19,а.