

bmp
.pdf141
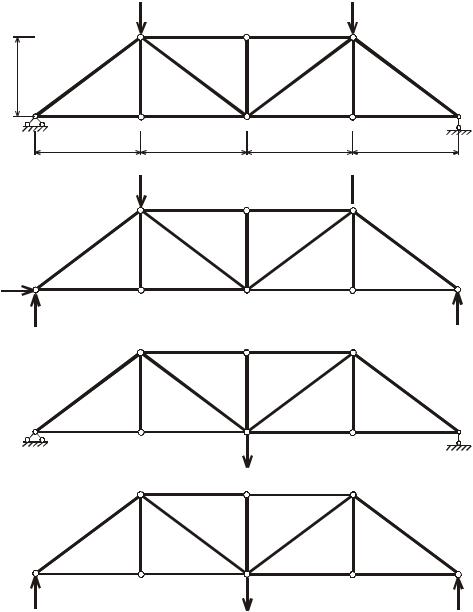
Переріз І–І поділяє основну ферму на два диска, з умов рівноваги яких визначимо зусилля
N7 10 для двох випадків розташування одиничної рухомої сили: сила в межах лівого та сила в межах правого диска.
Сила P=1 на лівому диску |
Сила P=1 на правому диску |
||
|
|
|
|
|
|
|
|
M7 0 |
N10' 7' 8 VB 24 0 |
M7 0 |
N7' 10' 8 VA 24 0 |
|
N10' 7 ' 3VB . |
|
N7 ' 10' 3VA . |
Лінія впливу побудована на рис.8.18,д.
Визначення найбільшого за величиною зусилля N8-9
Установимо систему рухомих сил в положення, при якому найбільша за величиною сила розташована під найбільшою ординатою лінії впливу. Перевіримо, чи виконується система
нерівностей (8.9). |
|
|
|
Згідно до рис.8.18,е можна записати: |
|
|
|
a 36 м, |
b 12 м; |
|
|
Rлів 300 кН, Rправ |
35 кН, Pкр 95 кН. |
||
Отже, маємо |
|
|
|
300 95 |
10,972 |
35 2,917. |
|
36 |
|
|
12 |
300 8,333 |
35 95 10,833. |
||
36 |
|
12 |
|
Обидві нерівності справедливі. Таким чином, прийняте положення системи сил є таким, коли зусилля N8 9 сягає найбільшої за модулем величини:
N8max9 70 0,125 30 0,25 70 0,5 30 0,625 70 0,7530 0,875 95 1,125 35 0,75 281,875 кН.
142
8.9. Задачі для самостійного розв’язування
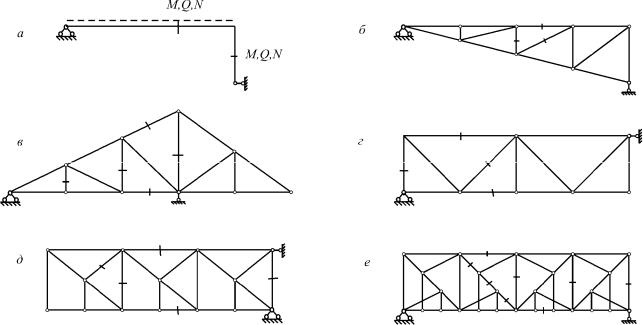
Побудувати лінії впливу зусиль в позначених стержнях.
Рис.8.19

9. Обчислення переміщень у стержневих системах
9.1. Короткі теоретичні відомості
Основним методом обчислення переміщень у стержневих системах є метод Мора, що дозволяє визначати переміщення точок системи через зусилля в двох її станах. Перший стан (вантажний) зумовлюється дією заданих зовнішніх навантажень, другий (допоміжний) – дією штучно прикладеного навантаження, яке відповідає переміщенню. Таким штучним навантаженням є узагальнена одинична силова дія (зосереджені сили, моменти або система зосереджених сил чи моментів, які здійснюють роботу на шуканому переміщенні).
Для обчислення будь-якого переміщення за означеним методом необхідно:
Визначити зусилля M p , N p , Qp від зовнішнього навантаження (вантажний стан p).
Обрати допоміжний стан i, відкинувши зовнішні навантаження і приклавши одиничну узагальнену силу, що відповідає переміщенню.
Визначити зусилля Mi , Ni , Qi у допоміжному стані.
Обчислити переміщення за формулою Максвела-Мора
ip NEAi NP dx MEIi MP dx QGAiQP dx , |
(9.1) |
||
l |
l |
l |
|
де сумировання ведеться по всім стержням системи. Тут позначено: ip – переміщення в напрямі
узагальненої одиничної сили допоміжного стану i від навантаження стану p; EA, EI, GA –
жорсткості елементів відповідно на поздовжні деформації, на деформації згину і на зсув; – коефіцієнт форми перерізу.
Величини кожного з трьох доданків у формулі Максвела-Мора характеризують внесок того чи іншого виду внутрішніх зусиль у переміщення, що розшукується. Для різного виду конструкцій нехтування деякими видами зусиль мало позначається на величині переміщення. Так, для балок і рам, деформування яких відбувається переважно за рахунок згину, можна знехтувати впливом поздовжніх і поперечних сил. У такому разі інтеграл Мора матиме вигляд:
ip Mi MP dx .
l EI
Для ферм, в стержнях яких існують переважно поздовжні деформації, можна записати:
ip NEAi NP l.
(9.2)
(9.3)
|
|
144 |
Для арок |
|
|
ip NEAi NP dx MEIi M P dx. |
(9.4) |
|
l |
l |
|
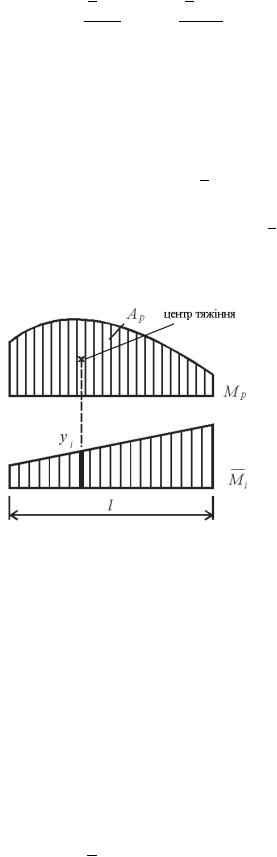
Інтеграл Мора може бути обчислений або безпосереднім інтегруванням, або за допомогою прийомів чисельного інтегрування. Процедуру обчислення інтеграла Мора називають множенням епюр. В практичних задачах, як правило, використовують правило Верещагіна і формулу
Сімпсона-Корноухова. |
|
За правилом Верещагіна для обчислення інтеграла l |
Mi M pdx достатньо помножити площу |
0 |
|
епюри вантажного стану M p на ординату епюри допоміжного сануMi , що береться під центром тяжіння епюри M p (рис.9.1):
Рис.9.1
l |
Mi M pdx Ap yi . |
(9.5) |
0 |
|
|
Якщо ордината yi і площа Ap розташовані по один і той самий бік стержня, добуток береться зі знаком “плюс”.
При застосування правила Верещагіна необхідно звернути увагу на те, що принаймні одна з перемножуваних епюр має бути прямолінійною. Крім того, ордината yi повинна бути взята на прямолінійній епюрі.
За правилом Сімпсона–Корноухова інтеграл Мора обчислюється через добутки відповідних ординат епюр на кінцях і всередині ділянки інтегрування (рис.9.2):
l |
l |
|
|
|
MiM pdx |
(aiap 4cicp bibp ). |
(9.6) |
||
6 |
||||
0 |
|
|
|

145
Рис.9.2
Формулу Сімпсона–Корноухова можна використовувати, якщо обидві епюри не мають зламів, розривів і точок перегину. Якщо такі точки існують, інтервал інтегрування треба розкласти на окремі підінтервали.
Формула Мора у вигляді (9.1) непридатна для обчислення температурних переміщень і виникає потреба мати ще один варіант формули, призначений для розрахунків на дію температури. Якщо
елементи системи мають симетричні перерізи, можна використовувати формулу |
|
|||||||
it |
|
t1 t2 |
AMi |
t |
t |
|
ANi . |
(9.7) |
h |
1 |
2 |
2 |
|||||
|
|
|
|
|
|
|
||
Тут – коефіцієнт лінійного розширення матеріалу (для бетону і для сталі 1,2 10 5 град 1 );
h – висота поперечного перерізу елемента; AMi , ANi – площі епюр згинальних моментів і поздовжніх сил у допоміжному стані; t1 і t2 – температура з двох боків елемента.
Перший доданок формули (9.7) характеризує внесок в повне переміщення згинальних моментів. Він береться зі знаком плюс, якщо розтягнені волокна на стержні в допоміжному стані збігаються з розтягненими волокнами від дії температури. Другий доданок характеризує внесок поздовжніх сил. Його знак залежить від знаків епюри поздовжніх сил допоміжного стану.
Якщо опори споруди зміщуються, то в статично визначуваних системах опорні реакції, внутрішні зусилля і деформації елементів дорівнюють нулю. Проте точки споруди одержують
переміщення. Зазначені переміщення можна обчислити як |
від’ємну суму добутків опорних |
реакцій допоміжного стану на відповідні вимушені зміщення опор: |
|
ic Rjicj . |
(9.8) |
У цьому виразі Rji опорна реакція Rj допоміжного стану i, |
cj відповідне вимушене зміщення |
опори у стані C. |
|

146
9.2. Визначення переміщення в рамі
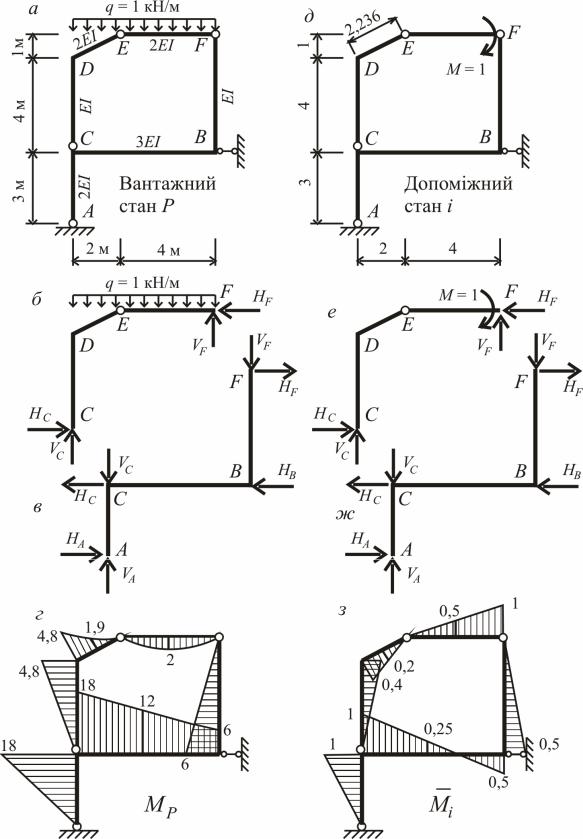
Визначити кут повороту стержня EF в шарнірі F рами від заданого навантаження (рис.9.3,а).
Кінематичний аналіз рами
Рама складається з чотирьох дисків (ACBF, CDE, EF і “земля”), які з’єднуються між собою чотирма простими шарнірами (A, C, E i F) і кінематичною в’яззю у вузлі B. Таким чином, D = 4, Ш
=4, С = 1, П = 0, В = 0. За формулою Чебишова (2.1)
Г3 4 2 0 3 0 2 4 1 3 0 .
Аналізуємо геометричну структуру рами:
1.DACBF D"земля" ДI ;
ШA ,CB
2.DCDE DEF ДI ДII .
ШA, ШE , ШF
Отже, рама має два “поверхи” і є геометрично незмінюваною та статично визначуваною.
Статичний розрахунок рами у вантажному стані
Визначаємо опорні реакції другого поверху (рис.9.3,б):
|
|
|
|
|
|
|
|
|
|
M прав |
0 |
V |
F |
4 1 4 2 0 |
V |
F |
2 кН; |
||
E |
|
|
|
|
|
|
|
||
|
0 |
|
H F 5 1 6 3 2 6 0 |
|
H F 1,2 кН; |
||||
M C |
|||||||||
|
|
|
|
|
|
|
|
|
|
Fx 0 |
|
HC 1,2 0 HC 0; |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Fy 0 |
|
VC 1 6 2 0 VC 4 кН. |
|
||||||
Визначаємо опорні реакції першого поверху (рис.9.3,в):
M A 0 |
H B 3 2 6 1,2 8 1,2 3 0 |
|
H B 6 кН; |
|
|
|
|
|
|
Fy 0 |
|
VA 4 2 0 VA 6 кН; |
|
|
|
|
|
|
|
Fx 0 |
|
H A 1,2 1,2 6 0 H A 6 кН. |
|
|
Епюру згинальних моментів M P у вантажному стані побудовано на рис.9.3,г.
147
Рис.9.3
148
Призначення допоміжного стану
Для визначення кута повороту стержня EF у шарнірі F відкидаємо задане навантаження і прикладаємо до стержня EF у зазначеному шарнірі зосереджений момент, що дорівнює одиниці
(рис.9.3,д).
Статичний розрахунок рами в допоміжному стані
Визначаємо опорні реакції другого поверху (рис.9.3,е):
|
|
|
|
|
|
|
|
0,25 м 1 |
|
M прав |
0 |
V |
F |
4 1 0 V |
F |
; |
|||
E |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
H F 0,1 м 1 ; |
|
M C 0 |
|
H F 5 1 0,25 6 0 |
|
||||||
|
|
|
|
|
|
HC 0,1 м 1 ; |
|
||
Fx 0 |
|
HC 0,1 0 |
|
||||||
|
|
|
|
|
|
VC 0,25 м 1. |
|
||
Fy 0 |
|
VC 0,25 0 |
|
||||||
Опорні реакції першого поверху (рис.9.3,ж): |
|
||||||||
M A 0 |
|
H B 3 0,25 6 0,1 8 0,1 3 0 |
H B 0,333 м 1 ; |
||||||
|
|
|
|
|
|
|
|
|
|
Fy 0 |
|
VA 0,25 0,25 0 VA 0; |
|
||||||
|
|
|
|
|
|
|
H A 0,333 м 1. |
||
Fx 0 |
|
|
H A 0,1 0,1 0,333 0 |
||||||
Епюру згинальних моментів Mi у допоміжному стані побудовано на рис.9.3,з.
Обчислення переміщення (кут повороту ригеля EF в шарнірі F)
|
|
|
|
|
C |
|
D |
|
|
F |
|
B |
|
|
ip MEIi MP dx MEIi MP dx MEIi MP dx |
MEIi MP dx MEIi MP dx |
|||||||||||||
|
l |
|
|
|
A |
|
C |
|
|
B |
|
C |
|
|
|
E |
|
|
F |
|
|
|
|
1 18 3 |
2 1 |
1 |
1 4,8 4 |
2 0,4 |
|
Mi M P |
dx Mi M P |
dx |
1 |
|
||||||||||
|
D |
EI |
|
E |
EI |
|
2EI |
|
2 |
3 |
EI |
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
1 |
|
2 |
|
6 |
18 1 4 12 0,25 6 0,5 |
|
|
|||||
|
EI |
2 6 5 |
3 0,5 6 3EI |
|
|
|||||||||
|
2,236 |
|
|
|
|
|
|
4 |
|
|
|
8, 466 |
||
|
6 2EI |
4,8 0,4 4 1,9 0,2 |
|
6 2EI 0 4 |
0,5 |
2 0 |
|
EI . |
||||||
149
9.3. Визначення переміщення в фермі
Визначити прогин вузла 5 ферми, представленої на рис.9.4,а.
а |
P = 12 кН |
2 |
3 |
P = 12 кН |
|
1 |
|
||
|
2EA |
|
2EA |
|
|
|
|
|
E |
|
|
E |
|
|
|
3м |
|
|
EA |
|
A |
EA |
A |
EA |
|
|
|
A |
|
|
2 |
|
|||||
|
|
|
|
|
||||||
|
E |
|
|
|
|
|
|
E |
||
|
2 |
|
|
|
|
|
|
|
||
A |
|
|
|
|
|
|
|
|
A |
|
EA |
|
EA |
|
EA |
|
|
||||
|
|
|
EA |
|||||||
|
4 м |
4 |
4 м |
5 |
4 м |
6 |
|
4 м |
||
|
|
|
|
|
||||||
B
б |
|
|
1 |
P = 12 кН |
|
2 |
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
-16 |
|
|
-16 |
||
|
0 |
0 |
|
0 |
|
|
|
0 |
|
- |
|
|
|
|
|
||||
|
2 |
|
|
|
|
|
0 |
||
|
|
|
|
|
|
|
|
|
|
HA =0 |
|
16 |
|
16 |
|
|
|
16 |
|
A V =12 кН |
4 |
|
|
|
|
5 |
|
||
A |
|
|
|
|
|
|
|
|
|
в |
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
P = 1 |
г |
|
|
|
-1,333 |
|
|
-1,333 |
||
|
|
3 |
|
0 |
|
|
|
|
3 |
|
3 |
|
|
8 |
|
|
|
3 |
|
|
8 |
|
|
|
|
|
8 |
||
|
|
|
|
, |
|
|
|
|
|
, |
|
|
|
3 |
0 |
|
, |
||
|
|
|
|
3 |
|
||||
0 |
|
0 |
|
|
|
0 |
|||
- |
|
|
|
|
|
|
|||
A |
|
0,667 |
|
0,667 |
|
|
0,667 |
||
0,5 |
|
|
4 |
|
|
|
5 |
|
1 |
|
|
|
|
|
|
|
|
||
Рис.9.4
Кінематичний аналіз ферми
P = 12 кН
3 
|
- |
|
|
2 |
|
0 |
0 |
|
|
|
|
|
16 |
B |
6 |
|
|
|
VB =12 кН |
|
3 |
|
|
B
6
|
- |
|
|
|
|
|
0 |
|
|
|
|
|
, |
|
|
|
|
|
|
8 |
|
|
|
0 |
|
|
3 |
|
|
|
|
|
3 |
|
|
|
0,667 |
|
|
B |
|
6
0,5
Задана ферма містить 8 вузлів і 16 стержнів (разом зі стержнями опор). Ступінь геометричної змінюваності
Г 2 8 16 0 .
Ферма утворена за способом “діад”. Дійсно, якщо прийняти будь-який стержень за основу, то можна утворити диск ферми шляхом послідовного приєднання вузлів за допомогою двох

150
стержнів. Утворений диск ферми приєднується до диску “земля” трьома опорними в’язями, яки всі три водночас не паралельні між собою і не перетинаються в одній точці. Отже, ферма статично визначувана і геометрично незмінювана.
Статичний розрахунок ферми у вантажному стані
Визначаємо опорні реакції (рис.9.4,б).
Fx 0 |
|
H A 0; |
|
|
|
|
|
|
|
M B 0 |
|
VA 16 12 12 12 4 0 |
|
VA 12 кН; |
|
|
|
|
|
M A 0 |
|
VB 16 12 12 12 4 0 |
|
VB 12 кН. |
Зусилля в стержнях можна визначити будь-яким способом: вирізанням вузлів, способом наскрізних перерізів, способом сумісних перерізів або будь-яким сполученням згаданих способів. Величини зусиль показано на стержнях ферми.
Призначення допоміжного стану
Допоміжний стан ферми представлено на рис.9.4,в. Тут відкинуто задані навантаження, а у вузлі 5 прикладено вертикальну одиничну силу P=1.
Статичний розрахунок ферми в допоміжному стані
Опорні реакції і зусилля в допоміжному стані ферми показано на рис.9.4,г.
Обчислення переміщення
Переміщення визначаємо за формулою (9.3):
ip NEAi NP l.
Довжини стержнів визначаються з геометричної схеми ферми (рис.9.4,г.). Тут також наведено жорсткості стержнів ферми на поздовжні деформації. Обчислення виконуються в таблиці 9.1. Шукане переміщення (прогин вузла 5) визначається сумою елементів шостого стовпця таблиці.