

Учебник системный анализ - Антонов
.pdfрешения i-й задачи. Таким образом, данная задача представляет собой задачу целочисленного линейного программирования, причем перемен ная Х/ может принимать только два значения: О и 1.
Задача определения оптимальной очередности разработки
встает перед проектировщиками на следующем этапе проектирования
после составления титульного списка задач, подлежащих автоматиза
ции. Суть задачи состоит в распределении ресурсов, выделяемых на разработку системы, между задачами и упорядочении процесса разра ботки задач во времени. Формализованная постановка данной задачи
будет вы~лядеть следующим образом: необходимо оптимизировать некоторыи функционал при выполнении ограничений на потребление ре
сурсов, выделяемых на разработку проекта, не больше заданного объе
ма в заданном временном интервале.
Будем использовать условия и обозначения, введенные при форму лировании предыдущей задачи, Т.е. будем считать заданными требуе
мые и выделяемые потоки и суммарные величины ресурса. Кроме того,
введем обозначения a.ij и ~ij - моменты начала и окончания использо
ванияj-го ресурса для i-й задачи. При заданных моментах начала и окончания использованияj-го ресурса для i-й задачи связь между по током требуемых ресурсов и его суммарным количеством выражает
ся в виде
11.
frij(t)dt = Wij'
•v Если моменты начала и окончания использованияj-го ресурса для
l-и задачи являются неопределенными, то поток ресурсов и его суммар
ное количество связаны соотношением
11.
fr/t)dt = Wij' i = 1, i, j = и,
о
где (3; = nmx(3ij - момент окончания разработки i-й задачи. Сформулируем ограничения, которые должны иметь место в данной
задаче:
ограничение на потребление ресурсов всем проектом
1
L,r/j(t) ~ R/T), j =и,
;=1
ограничение на время выполнения всех задач проекта к установлен
номусроку
302
тах.(3; ~T.
{i}
При вьmолнении оговоренныхусловий и обозначений задачараспре
деления ресурсов между операциями проекта обычно формулируется
следующим образом: имеется комплекс операций, для которых опре
делены отношения частичного порядка, задаваемые в виде графа G.
Необходимо распределить ресурсы, заданные в количестве R/f), меж
ду операциямИ комплекса таким образом, чтобы некоторая целевая
функция достигла своего экстремального значения.
В качестве критерия оптимальности можно использовать
тах.(3. ~ min, |
(10.1) |
{i} I |
|
что соответствует выполнению проекта за минимальное время.
Более общий критерий для данной задачи может быть записан в виде
(10.2)
i=\
где <p/(~) - неубывающая функция ~/' пре~ставляющая собой HeKOТO~
рый функционал, имеющий экономическии смысл. Чаще всего данныи
функционал представляет собой расходы, связанные с проектировани
ем. В этом случае функционал необходимо минимизировать.
Задача (10.1) характерна для проектирования технических систем
(технологическихлиний,летательных аппаратов ит.п.). длятакихсис тем после завершения этапаразработки начинается этап функциониро
вания. При разработке автоматизированных систем существенными
становятся моменты окончанияразработокотдельныхфункциональных
задач. Сказываетсяэтапностьразработки ивнедрениясистем. дляэтих
задач целесообразно пользоваться критерием (10.2).
Рассмотрим еще одну постановку задачи, возникающей при орга
низации деятельности транспортных предприятий, так называемую
транспортную задачу. В некоторых пунктах а\, а2,.. ·, аn находятСЯ
склады, в которых хранятся товары в количествах Х\, Х2,···, ХN соот
ветственно. В пунктах ы' Ь2,... , Ьm находятся потребители, которым
необходимо поставить эти товары в количествах, не меньших, чем УI'
У2,••• , Уmсоответственно. Обозначимчерез Cij стоимость перевозки еди ницы груза из пункта а/ в пунктЬ/ Xij - количество товара, перевозимо го из пункта а/в пункт bj' Для того, чтобы удовлетворить запросы по
требителей, необходимо, чтобы выполнялась система неравенств
L,X/j ~Yj,j=l, т.
303
С другой стороны, необходимо учитывать, что с i-гo склада нельзя вывезти больше продукта, чем там имеется. Следовательно, должна
выполняться еще одна система
! I
Удовлетворить сформулированным условиям можно бесконечным числом способов. для того, чтобы выбрать оптимальное правило пе ревозок, необходимо сформулировать критерий, который будет отражагь представления о цели функционирования транспортного предприятия. В
данной задаче одним из возможных критериев может выступать сто
имость перевозок, тогда вид функционала будет определяться очевид ным образом:
;j
Таким образом, paccMorpeHbl задачи, математическая формули
ровка которых описывается схожими моделями, а именно, и оптимизи
руемый функционал, и ограничения представляют собой линейные фор
мы некоторых переменных. Рассмотрим подходы к решению такого типа
задач.
10.2. Задача линейного программирования
Постановка задачи линейного программирования. Задачи ли нейного программирования (ЗЛП) - простейший тип оптимизационных задач. Постановка данной задачи выглядит следующим образом.
Имеется множество переменных Х = (Х\, х2,... , Х). Целевая функ ция линейно зависит от управляемых параметров:
;=1
Имеются ограничения, которые представляют собой линейные фор-
мы:
Задача линейного программирования формулируется так: определить максимум линейной формы
(10.3)
304
. , |
при условии, что точка (ХI' х2,••• , |
Хn |
) |
|
|
|
|
оторому множе- |
||
|
|
п~инадл~жит HeR' |
|
|
||||||
. ству D, которое определяется системои линеиных неравенств |
|
|
||||||||
|
al\x\ +а\2Х2 +...+ |
|
|
<ь· |
|
|
|
|
|
|
|
а\.х. - |
l' |
Х;> О,i = 1, n. |
|
|
|||||
|
{ ~.~:~:.~.~.~~~~..~""".~.~~~.~~..~.~.~: |
(10.4) |
||||||||
|
|
|
|
|
|
|
|
|
||
|
аm\х\ +аm2Х2 + ... +аmnхn ~bm' |
|
|
|
|
|
||||
|
v ( .. |
|
• ) |
,кото |
рое удовлетворяет |
|||||
|
Любое множество значении |
х\ ,Х2""'Хn |
|
|
|
|||||
|
системе неравенств (10.4) задачи линейноГО программирования, явля |
|||||||||
|
ется допустимым решением данной задачи. Если при этом выполняет- |
|||||||||
|
ся неравенство |
|
|
|
|
|
|
|
|
|
|
C\X~ +C2X~ + ... +CnX~ ~C\X\ +С2Х2 +"'+С.Хn |
|
|
|||||||
|
|
|
|
|
|
|
|
о о |
ХО |
явля |
|
для всего множества значений Хр Х,... , Хn' то значение Х\ 'Х2 , ... , |
• |
- |
|||||||
|
ется оптимальным решением задачи линейнОГО программирования. |
|||||||||
ЗадачулинейноГО программированияудобно представлять в вектор
ной форме, тогда она будет выглядеть следующим образом:
найти тах F(x) = тах (СТх)
при условии АХ$; ро; X~ О,
где с |
= (С |
с) представляет собой n-мерный вектор, составлен- |
||
с\' |
2"'" n |
т |
нированная |
|
ный из коэффициентов целевой функции, причемс -транспо |
v |
|||
вектор-строка; х = (x l , Х2,••• , хn) - |
n-мерный вектор переменных решении; |
|||
Р.~[ J-т-мерныйвеrropсвободныхчленовОI]>авичений;
матрица А размером (т х n) -vматрица, составленная из коэффициен
тов всех линейных ограничении:
|
|
а |
2\ |
|
аа\222 |
....., |
аа,.2• J. |
|
|
А= |
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
а mn |
r |
|
а |
т |
\ |
а |
У2 |
|
|
|
|
|
|
|
|
|||
Простые ЗЛП допускают геометрическую интерпретацию, позво-
ляющую непосредственно из граФика получитьрешение и проИЛЛЮСТРИ-
poвarьидеюрешенияболеесложныхзадачлинейноГОпрограммирования.
305
20-4355
Каноническая форма задачи линейного программирования. Любуюзадачулинейногопрограммированияможносвестикнекоторой
стандартной форме с ограничениями, записанными в виде уравнений.
Это достигается путем введения свободных переменных во все огра
ниче~ия. Свободная переменная учитывает разницу между правой и
левои частями неравенства.
Пусть
|
Хn+\ - |
ДОполнительная переменная, которая численно равна Ь, - |
~>,;X;; |
|
|
|
|
|
;=1 |
i 1, |
Хn+2 - |
ДОПОлнитеЛьная переменная, которая численноравна Ь2- |
~>2;X;> |
|
|
И т.д.; |
1=' |
||
|
n |
m - |
ДОполнительная переменная, которая численноравна Ьm- |
|
|
Х + |
|
!ат;Х;. |
|
|
В результатеполучаем новую систему ограничений: |
;=, |
||
|
|
|
allx, +а'2Х2 +... +а,nхn +lx.+l +ОХ.+2 +... +ОХ.+m =Ь,; |
|
|
|
|
а2,х, +а22Х2 +... +а2nхn +ОХn+' +1Хn+2 +... +ОХn+m =Ь2; |
|
|
|
|
................................... |
|
аm,Х, +аm2Х2 +... +аm.Х. +Ох.+, +ОХ.+2 +... +1Хn+m =Ьm
Х; ~O, i=l, 2, ..., n, n+l, ..., n+т.
Целевая функция будет иметь вид
max:F(x"x2,···,X.) = max:(с,х, +С2Х2 +.. .'СnХ. +ОХn+' +ОХ.+2+...
Или В маtpичной форме:
max:F(x) = тах:(сТх)
;
+Ох.+m) .
(10.5)
при условии АХ\+ ВХ =Р |
Х > ОХ> о |
|
|
2 |
О' , - , \ - , |
|
- вектор свободных |
где Х, - вектор первоначальных переменных; Х |
2 |
||
переменных; В - единичная маtpица mхn. |
|
||
1О ... О]
В= [~..~.:.:: О .
О 0 ... 1
ТакуюформузаписиназываюткаНОническойформойзадачилиней
ного программирования. Вканонической формеограничениязапИсыва
ются в виде равенств.
306
,,'
При записи задачи линейного программирования в стандартной или канонической форме число линейно независимых уравнений, как прави ло, меньше числа переменных (на практике всегда т < n, где т - число уравнений). Orметим некоторые свойства, касающиеся системы огра ничений:
1) уравнения линейно независимы, если ни одно из них не м,?жет быть получено из остальных путем алгебраических преобразовании, т.е.
никакие из них не являются следствием остальных;
2) если число независимых уравнений больше числа перемен~ных,
то такая система не имеет решения и называется несовместимои;
3)если число независимых уравнений равно числу переменных, то
такая система имеет единственное решение, которое либо оптималь
но, если все компоненты положительны, либо недопустимо, если хотя бы одна из компонент Otpицательна;
4)если удается найти множество неOtpицательных~наченийХ= (ХL' Х2'••. ' Х.), которое является решением системы т линеиных уравнении
сn+m неизвестными, то такое решение называют базисным, а ненуле
вые переменные - базисными переменными.
Пример задачи линейного программирования. Рассмотрим
двухмерную задачу линейного программирования. Пусть tpебуется найти максимум линейной формы
max:F(x"x2) = тах:(х, +2х2)
при условии
Х, +Х2 ~120, O~ Х, ~ 100,
O~ Х2 ~ 75.
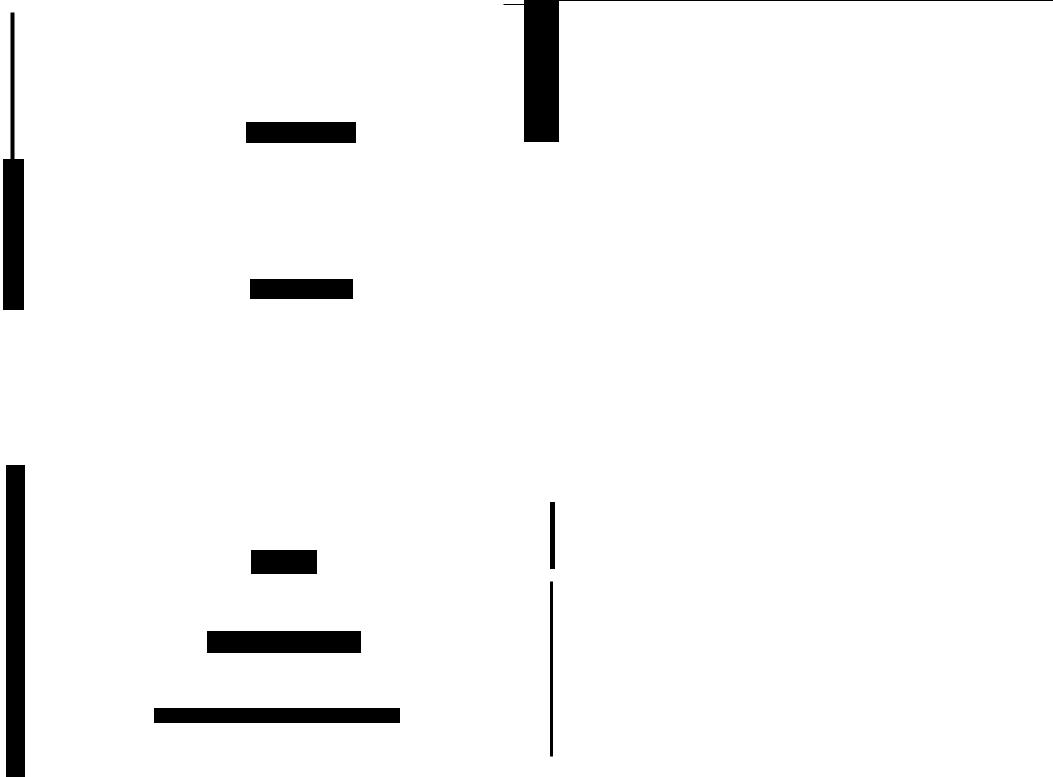
Изобразим область, описываемую совокупностью ограничений на плоскости х,ОХ2 (рис. 10.1). Переменныех, ИХ2 неоtpицательные, по этому множество точек (Х\' х2), являющихся возможными решениями задачи, находятся в 1 квадранте. Заменим знак в Х\ + Х2 :5: 120 на знак равенства, получим уравнение прямой: Х\ +Х2 = 120. Эта прямая делит плоскость на две полуплоскости. Все точки одной полуплоскости удов летворяют неравенству Х, +Х2 > 120, другой - неравенству Х\ + Х2 < 120.
ПоCtpоив аналогичные прямые х, =100 и Х2 = 75, получим много угольник, множество точек которого (Х\, Х2) удовлетворяет всем нера
венствам системы ограничений. Этот многоугольник и представляет
собой область допустимых решений D.
Из множества точек (Х" Х2) многоугольника необходимо выбрать
такую, в которой функция F(x" Х2) = (Х, + 2х2) принимает максимальное
307
11,
i
I
11
I I
100 |
120 |
х, |
|
|
Рис. 10.1. Геометрическая иитерпретациязадачилииейногопрограммирования
значен~е. Для некоторого Фиксированного значенияF * линейная функ
ция F (X 1, Х2) = (Х1 + 2х2) представляет собой прямую линию. Задава
ясьразличными значениями F*, получимсемейство параллельныхпря
мых. Увеличениезначенийлинейной функциисоответствуетперемеще
нию прямой параллельно самой себе вверх. Следовательно, как видно
из рис. 10.1, максимальное значение целевой функции на допустимом
множестве точек соответствует прямой, проходящей через точку z пе
ресечения прямых Х1 + Х2= 120 и Х2= |
75. |
Решив эту систему, получимХ1= 45. Тогда максимальное значение |
|
функции F = mаХ(Х1 + 2х2) = 195. |
. |
10.3. Решение задач линейного программирования
симплекс-методом
Метод полного Исключения. Перейдем к Изложению методов
решения задачлинейного программирования. Рассмотримвначалеодин из вспомогательных методов, ИЛЛюстрирующий Возможность преобра
зования сис~мылинейныхуравнени~, а именно, приведения матрицы,
СОCПffiЛенноиизпараметровуравненииограничений, кединичномувиду.
Переобозначим свободные коэффициенты ограничений а =Ь
]о f
308
Пусть имеется система ограничений в виде
n |
_ |
L,ajjXj =аjO' j =1, т.
;=1
Перепишемданную систему уравнений в матричной форме: АХ=Ао,
и А = [А, Ао], где Ар - расширенная матрица.
Методполногоисключениясостоитизконечногочислаоднотипных
шагов и заключается в приведении матрицы А к единичному виду.
Метод основан на следующих двух операциях.
Одну из строк расширенной матрицы умножают на число, отлич
ное ОТ нуля.
Из каждой строки расширенной матрицы (Ар) вычитают данную строку. Каждое такое преобразование называется преобразованием Гаусса. В результате получаем новую систему линейных уравнений, эквивалентную исходной.
Рассмотрим более подробно метод полного исключения.
1. Среди элементов матрицы А выбирают произвольный элемент, отличный от нуля. Этот элемент называют направляющим элементом шага. Строку и столбец, содержащие направляющий элемент, называ ют направляющей строкой и направляющим столбцом данного преоб
разования.
2. Все элементы направляющей строки расширенной матрицы (Ар) делят на направляющий элемент. В результате получают направляю щую строку с направляющим элементом, равным единице. Далее из каждой строки матрицы А вычитают новую направляющую строку, умноженную на элемент, который расположен на пересечении сроки и направляющего столбца. Итак, пусть исходная система уравнении имеет
вид
{аllХ\ +а\2Х2 + ... +а\nхn =а\о;
~~:~:.+.~~~~.~:::~.~~:~:.;.a w;
аm\х\ +аm2Х2 + ... +аmnхn -аmо·
Возьмем в качестве направляющей строки вторую строку, в каче
стве направляющего столбца второй столбец, тогда направляющий эле мент будет Х2 (коэффициент при нем равен а22). Разделим направляю щую строку на этот коэффициент и перепишем вновь полученную сис
тему ограничений:
309
аl\Х\ +а\2Х2 + ... +а\.х. =а\О;
а2\ |
а2• |
а2 |
-х\ +Х2 |
+ ... +-х |
=_0; |
а 22 |
а 22 |
а 22 |
Далее умножаем направляющую строку поочередно на элементы,
стоящие в направляющем столбце преобразуемого уравнения, и резуль тат вычитаем из соответствующего уравнения. Иными словами, вна чале умножим направляющую строку на а\2 и вычтем полученный ре
зультат из первого уравнения. Далее направляющую строку умножим
на аЗ2 и вычтем из третьего уравнения и т.д. до последнего т-го урав
нения. Получим новую систему:
Матрицу, в которую преобразовалась расширенная матрица А пос-
р
ле первого шага, обозначим А~\). В полученной матрице все элементы
направляющего столбца, отличные от направляющего элемента, стали равными нулю. Совокупность элементов первых n столбцов матрицы Ар' лежащих вне направляющей строки и столбца предьщущего шага,
называют главной частью матрицы А(\) данного преобразования. На
правляющийэлементвторогошагавыбираютсрединенулевыхэлемен-
тов главной части матрицы A~\>' полученной после проведенного пре
образования.
Второй и дальнейший шаги метода проводят аналогично первому
шагу. Последовательность действий продолжается до тех пор, пока
имеется возможность выбора направляющего элемента. Если послеk-
го шага главная часть матрицы A~k) не содержит ни одного элемента
или содержит только нулевые элементыI' то процесс исключения пере
менных заканчивается. После проведения преобразований в системе
можетоказаться[уравнений, [~т. Пустьэтопервыепопорядку[ урав
нений тогда система уравнений может быть записана в виде
{-а(l)х |
=а(1) |
(10.6) |
" - ' ij J |
/0' |
|
}=\
Примем, что i-й направляющей строке соответствует i-й направляю-
v |
(1) |
{О; |
i "# j. . |
|
щии столбец, тогда а/. |
= |
1; |
.. ']= 1. 2..... 1. |
|
|
, |
|
l = ] |
|
•
(1) ~ (1)
Следовательно, (10.6) можно записать в виде Х; =а/о - "-'а/} Х)' причем
)=1+\
переменные Х/ являются базисными, а переменные Ха (s = [+ 1, ... , n) -
небазисными.
Пример применения метода полного исключения. Рассмот-
рим пример применения метода полного исключения Гаусса для иссле-
дованиясистемыуравнений
{Х\ +2Х2 +хз +Х4 =3;
2х\ +Х2 +хз +3Х4 =3;
4х\ +5Х2 +3хз +5Х4 =9.
Расширенная матрица имеет вид
12113
2 1 1 3 3
Ар = 4 5 3 5 9
~А2 Аз А4 Ао
Первый шаг. В качестве первого направляющегоэлемента возьмем
а11=1. Умножив первую строку матрицы А на 2, вычтем результат из второго уравнения и, умножив на 4, вычтем результат из третьего урав-
нения;получим
311
310
·11
·1' ,
1,11 '1
1:
'.1
111
1:
!!1
!)
1 :
I
11
1
1
1, l'
!I,
I!, '
11
.11.
11"
11'
,··1
1. l'
А(1) = |
А\ |
А2 |
Аз |
А4 |
A~ |
1 |
2 |
1 |
1 |
|
|
р |
О |
-3 |
-1 |
1 |
- . |
|
о |
-3 |
-1 |
1 - |
|
Второй шаг. ПОскольку главная часть маtpицы А(\) содержит от
ЛИчные от нуля элементы, ПРОДОЛЖИМ процесс исклю~ения. Выберем
элемент a~~= -3 в качестве направляющего элемента на втором шаге
преобразования. Разделим вторую С1року на-3, получим
1 |
2 |
1 |
1 |
3 |
|
1 |
уз |
-Уз |
1 |
|
-3 |
-1 |
1 |
-3 |
Далее УМНОжим вторую ctpoкy на 2 и вычтем результат из первой
Сtpоки, УМножим вторую строку на -3, результат вычтем из tpетьей
|
|
|
|
1 |
о |
уз |
1% |
1 |
|
|
|
|
|
|
|||||
Сtpоки, В итоге А(2) = |
О |
1 |
уз |
-Уз |
1 |
|
|||
|
|
|
р |
|
|
||||
|
|
|
|
о |
О |
о |
О |
о |
|
|
|
|
|
|
|||||
|
|
|
|
||||||
|
Как видим, главная часть маtpицы |
A~2), состоящая из элементов |
|||||||
(2) |
и |
(2) |
, содержиттолько нули. Следовательно, процесс исКЛючения |
||||||
азз |
|
а34 |
|||||||
заканчивается. Исследуем матрицу А(2). Поскольку tpетья ctpoKa со-
держит только нулевые элементы, это свидетельствует о том, что на
чальныIe уравнения были зависимыми, и, следовательно, она может
быть отброшена. Тогда Эквивалентная маtpица системы уравнений
будет Выглядеть следующим образом:
А(З) = |
1 |
о |
уз |
1 |
|
|
|
|
|
р |
|
1 |
уз |
|
|
О |
1 |
Теперь можно записать базисное решение
Х\ =1; Х2 =1; Хз =О; Х4 =О, а также соответствующее общее решение
312
1 |
5 |
1 |
1 |
|
Х\ =l- з |
аз -з0.4; Х2 |
=l-з |
аз +з0.4; ХЗ =аз; Х4 |
=0.4' |
где аз, а4 - произвольные скаляры.
Симплексные преобразования. В основе симплекс-метода ле жит идея поиска базисного решения с последующим переходом от од ного базиса к другому таким образом, чтобы целевая функция при этом все время увеличивалась, если речь идет о задаче максимизации. Пусть мы имеем задачу линейного программирования в канонической форме. Маtpица ограничений имеет вид
1 О О
О 1 О
где е\ = О ; е2 = О ; еm = - единичный базис, элементы alO~ О для
О
О О 1
всех i = 1,2, ... , m.
Будем применять метод полного исключения к расширенной мат рице ограничений. Выбираем направляющий элемент alJ на данной ите рации. В результате преобразования Гаусса, методика которого была
только что описана, получим новые значения коэффициентов:
если 1:1= i, 1= 1,2, ... , m.
Выясним условия, при которых новое базисное решение будет до-
пустимым, т.е. a~~+\) > О для всех 1. По предположению, аю~ О, тогда
|
(k) |
> О |
a(k+\) |
=а/о |
|
/0 |
(k) |
- • |
а/}
Если a~k) < О, то очевидно, a,(~+\) > О , так как a;~) > О, a/~k) > о.
Если a(k) > О |
, |
то a(k+1J =a(k)ral(~) - |
a~~)] будетбольшенуляпривсех |
||
Ij |
10 |
/j |
(k) |
a(k) |
|
|
|
|
|
a'j |
/j |
значениях1= 1, 2, ... , ттогдаитo~ькoтогда,когда a,~: = min ( a/~: ]при |
|
ау |
lаи |
условии atk ) > о.
I! |
313 |
|
|
11 |
|
1 |
|
:,
,,', 1
,11'
,",1
,1'1 i 1
""
li
I
I
11,1
|
|
|
|
|
|
|
|
|
|
|
|
|
Преобразование Гаусса называется симплексным преобразовани |
1 |
|
Нижняя строка элементов a Ok, k = О, т+n называется индексной. |
|||||||||
, |
|
|||||||||||
ем, когда направляющий элемент определяют по следующим правилам· |
|
Элементы индексной строки вычисляются следующим образом: |
||||||||||
• направляющий столбец выбираютиз условия что в нем имеетс~ |
|
|
=I,aikC + -C |
|
|
i =1, т означает номер соответствующей строки. |
||||||
хотя бы один положительный элемент·, |
' |
|
a |
k |
; |
|||||||
|
|
|
|
Ok |
n i |
|
|
|
|
|
|
|
• направляющуюстрокувыбираюттак, чтобы отношение aiO бьmо |
|
|
;=1 |
|
|
|
|
|
|
|
||
|
поскольку на первом шаге заполнения таблицы все элементы C n+1 рав- |
|||||||||||
минимальнымприусловии,чтоalj> о. |
ij |
|
ны нулю, то элементам индексной строки присваиваются значения со |
|||||||||
a |
|
ответствующих элементоВ целевой функцииданного столбца, взятыес |
||||||||||
Задачи линейного программирования, решаемые с помощью симп |
|
|||||||||||
|
обратным знаком, т.е. a =-C • Последняя строка таблицы служит для |
|||||||||||
лфекс-метода, основываются на представлении решения в табличной |
|
|||||||||||
|
|
|
|
|
|
Ok |
k |
|||||
орме. ~ассмотрим последовательность действий при решении зада |
|
определения направляющего столбца. |
||||||||||
чи линеиного программирования. |
|
|
|
Элемент а |
оо |
равен значению целевой функции, которое вычисляет- |
||||||
|
|
|
|
|
|
|
|
|
|
|||
Пусть имеются линейная форма |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
оо |
т |
|
|
|
||
|
|
СЯ по формуле а |
= L,cn+ka ko , k-номер базисной переменной (индек- |
|||||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
k=\ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сация идет по строкам таблицы). |
||||||||
и ограничения |
|
|
|
|
В столбце Вхзаписываются базисные переменные, на первом шаге |
|||||||
|
|
|
|
|
||||||||
{ |
аIlХ\ +а\2Х2 + ... +а\n Хn |
<- а10'. |
|
в качестве базисных выбирают фиктивные переменные {x n+k },k =1, т. |
||||||||
|
В дальнейшем фиктивные переменные необходимо вывести из базиса. |
|||||||||||
а2\х\ + а22Х2 +... +а2nхn |
~ а20; |
|
||||||||||
|
|
В столбец С записываются коэффициенты при X n+k' на первом шаге |
||||||||||
........................................ |
|
значения этих коэффициентов равны нулю. |
||||||||||
|
|
|
||||||||||
аm\х\ +аm2Х2 + ... +аmnхn ~ аmО· |
|
|
для перехода от базиса фиктивных переменных к базису реальных |
|||||||||
|
|
переменных применяют следующие правила: |
||||||||||
Приведем матрицу ограничений к каноническому виду: |
|
|||||||||||
|
|
• в качестве направляющего столбца выбирают столбец Aj , для ко- |
||||||||||
аllХ\ +а\2Х2 +а\nхn +... +lхn+\ +... +Охn+m =а10' |
|
торого выполняется условие аО) = min {a ol }, 1= 1, n +т при a Ol < О, т.е. |
||||||||||
|
|
|
|
выбирается минимальный элемент, при условии, что этот элемент от- |
||||||||
{am:~:·~:~·~~~·~:::·;·~···~···~·~~·····~·.·.:·~·~~·····.~.~.
mn n |
n+1 |
n+m |
тО· |
На следующем шаге составим таблицу (табл. 10.1).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
С• |
С2 |
Сз |
|
|
С] |
|
|
|
С. |
|
о |
|
|
|
|
|
|
о |
|||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
Вх |
Ао |
А• |
А2 |
Аз |
|
|
А! |
|
|
|
|
А. |
|
A,.+I |
|
|
|
|
|
АII+IJt |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
CII+I |
Х".I |
а\О |
att |
at2 |
а\3 |
|
|
atj |
|
|
|
at. |
|
|
|
|
|
|
|
|
О |
|||||
|
C II+2 |
Х,.+2 |
а20 |
а2. |
й22 |
а2З |
|
|
a2j |
|
|
|
а20 |
|
О |
|
|
|
|
|
|
О |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C,.+i |
Х,.., |
аю |
ан |
а."2 |
а/з |
|
|
а" |
|
|
|
а/. |
|
О |
|
|
|
|
|
|
О |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
СII+", |
Х,,+," |
аМ> |
а... |
й".2 |
а..з |
|
|
a<nj |
|
|
|
alМ |
|
О |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аоо |
йо. |
а02 |
йоз |
|
|
йо] |
|
|
|
ао. |
|
ао.-. |
|
|
|
|
|
бom•• |
|||||
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рицательный;
• выбирают направляющую строку, для чего каждый элемент стол-
бца свободных членов делится на соответствующий элемент направ
ляющего столбца, элемент столбца свободных членов находится в од-
ной строке сэлементоМнаправляющего столбца aiO • Из всех возмож-
a/j
ныхсоотношенийвыбираетсяминимальноеа/о =min{aro } приусловии,
a/j arj
что ат} > о, 1~ r ~ т.
Применяясформулированныеправила, определяемнаправляющий
элемент. Далее выполняется шаг симплексных преобразованиЙ.
Переменная, которая соответствует направляющему столбцу, вво дится в базис, а переменная, соответствующая направляющей строке, выводится из базиса. при этом для переменной, вводимой в базис, из-
315
314

ii 1.
,1
·11'
1 !
меняется соответствующее значение коэффициента целевой функции.
ВместокоэффициентаСn+1 соответствующего старой базиснойперемен
ной, втаблице записываеТсязначение коэффициентацелевой функции
при переменной, вводимой в базис.
Если направляющий элемент a/j' то переход от данной таблицы к
следующей осуществляется с использованием следующих правил. 1. для всех элементов направляющей с1рОКИ
(k) a(k+\) = a jt
It |
a |
(k) , |
|
|
jj |
где k - номер шага (k = 1, 2, ... ); i - номер направляющей С1роки;j
номер направляющего столбца; f = о, т+n , Т.е. все элементы направ
ляющей CtpОКИ делим на направляющий элемент, в итоге направляю-
щий элемент стал равным единице; al~~+1) =1.
2. Внаправляющемстолбценеобходимополучить a~jk+\) = о,длявсех r =1, т, r"# i, при a(.k+\) =1, Т.е. в направляющем столбце должны быть
V
все нули кроме направляющего элемента, которыиv равен еДИнице.
для всех остальных элементов, включая индексную с1рoку, произ
водим вычисления
а(k+\) = а(k) - |
a(k)a(k) |
1"# J'r"# i. |
|
/t fj |
|||
rt |
rt |
(k)' |
, |
a;j
Симплексные преобразования повторяют до тех пор, пока не реа
лизуется один из двух Возможных исходов:
а) все a ot ~0- это условие оптимальности базиса последней таб
mщы;
б) найдется такой элемент аО}< о, при котором все элементы стол
бцаarj::; о,- этопризнакнеограниченностицелевой функциина множе
стве допустимых решений.
Пример решения задачи линейного программирования. Рас
СМО1рим задачу линейного программирования в следующем виде:
найти максимумлинейной формы 4х\+ 3Х2при ограничениях
2
Х\ ~ 4000, Х2 ~ 6000, Х\ +-3Х2 ~ 6000, Х\'Х2 ~ О.
Каноническая форма задачи линейного программирования будет
иметь вид
4х\ +3Х2 +Охз +ОХ4 +OXs ~ тах.;
lх\ +ОХ2 +lхз +ОХ4 +OXs =4000;
Ох\ +IХ2 +Охз +IХ4 +OXs =6000;
2 |
_ |
6000. |
lх\ +'3Х2 |
+Охз +ОХ4 +lxs - |
Составим исходную симплекс-таблицу (табл. 10.2).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С, |
|
|
|
|
|
|
|
4 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О |
|
О |
|
О |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A s |
|
|
|||
|
|
|
|
|
|
|
|
|
Вх |
|
Ао |
|
|
А, |
|
А2 |
|
Аз |
|
А4 |
|
|
|||||||||
|
|
|
|
|
|
О |
|
|
Хз |
|
4000 |
1 |
|
|
|
|
О |
1 |
|
О |
|
О |
|
|
|||||||
|
|
|
|
|
|
О |
|
|
Х4 |
|
6000 |
|
|
О |
1 |
|
О |
1 |
|
О |
|
|
|||||||||
|
|
|
|
|
|
О |
|
|
Xs |
|
6000 |
1 |
|
|
|
2 |
|
О |
|
О |
1 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
О |
-4 |
|
|
-3 |
|
О |
|
О |
|
О |
|
|
||||||
|
Поскольку --4 < -3 < о, то в качестве направляющего выбираем пер |
||||||||||||||||||||||||||||||
|
выйстолбец.Составивотношениевида {а;о},определяемнаправляю- |
||||||||||||||||||||||||||||||
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а;\ |
|
|
|
|
|
|
|
||
щую строку. Для этого находим |
минимальное отношение |
||||||||||||||||||||||||||||||
I |
|||||||||||||||||||||||||||||||
|
·n {4000 |
6000 |
6000} = 4000. Следовательно,направляющаяС1рoка_ |
||||||||||||||||||||||||||||
|
IШ |
' о' |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
||||||||||
|
первая, направляющий элемент - аl1=1. Применив первыи шаг симп |
||||||||||||||||||||||||||||||
|
лексного преобразования, получим новую таблицу (табл. 10.3). |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.3 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
С, |
|
|
|
|
|
|
4 |
|
|
|
3 |
|
О |
|
О |
|
|
О |
|
||||||
|
|
|
|
|
|
|
|
|
ВХ |
|
Ао |
|
|
А. |
|
А2 |
|
Аз |
|
• А4 |
|
|
As |
|
|||||||
|
|
|
|
|
|
4 |
|
|
Х. |
4()()() |
|
1 |
|
|
|
О |
|
1 |
|
О |
|
|
О |
|
|||||||
|
|
|
|
|
|
О |
|
|
Х4 |
6000 |
|
|
О |
|
1 |
|
О |
|
1 |
|
|
О |
|
||||||||
|
|
|
|
|
|
О |
|
|
Xs |
2()()() |
|
|
О |
|
-2 |
|
-1 |
|
О |
|
1 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16000 |
|
|
О |
|
-3 |
4 |
|
О |
|
|
О |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
316 |
317 |
|

На данном этапе в качестве направляющего столбца выбираем
второй, направляющая строка - третья, т.к |
|
2000 < 6000 < 4000 . При- |
|||||||||||||||||||||||
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
2/3 |
1 |
|
О |
||||
меним следующии шаг симплексного преобразования. В результате по |
|||||||||||||||||||||||||
лучим табл. 10.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.4 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С, |
|
|
|
|
|
|
4 |
|
3 |
|
|
О |
|
|
О |
|
О |
|
|
||||
|
|
|
|
В. |
|
|
Ао |
|
|
А, |
А2 |
|
|
Аз |
|
А4 |
|
As |
|
|
|||||
|
4 |
|
х, |
4000 |
|
1 |
|
О |
|
|
1 |
|
|
|
|
О |
|
О |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
О |
х4 |
3000 |
|
|
О |
О |
|
|
3 |
|
|
|
1 |
3 |
|
|
|||||||
|
|
|
|
|
|
|
- |
|
|
|
- - |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
||
|
3 |
|
Х2 |
3000 |
|
|
О |
1 |
|
|
- -3 |
|
|
|
О |
-3 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
9 |
|
|
|||
|
|
|
|
|
|
25000 |
|
|
О |
О |
|
- - |
|
|
О |
- |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1
Так как аоз =-2 < о, то направляющий столбец Аз, направляющая
строка- вторая, направляющийэлемент а23 = ~. Выполнимочередной
шаг преобразования, получим еще однутаблиtу (табл. 10.5).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.5 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С, |
|
|
|
|
|
|
|
4 |
|
3 |
|
|
О |
|
|
|
О |
О |
|
|||||
|
|
|
|
В. |
|
Ао |
|
|
|
А, |
А2 |
Аз |
|
А4 |
As |
|
||||||||||
|
|
|
|
|||||||||||||||||||||||
|
4 |
|
х, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
2000 |
|
|
1 |
|
О |
|
О |
|
-- |
1 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
О |
хз |
2000 |
|
|
|
О |
О |
1 |
|
|
|
- |
|
-1 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
3 |
|
Х2 |
6000 |
|
|
|
О |
1 |
|
|
О |
|
1 |
|
О |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
26000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
4 |
|
|||
|
|
|
|
|
|
|
|
|
О |
О |
|
О |
|
- |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
Поскольку в индексной строке все элементы ПОЛожительны это |
||||||||||||||||||||||||||
означает, что найдено оптимальное решение Х |
= 2000, Х = 6000 |
|||||||||||||||||||||||||
Хзо = 2000. Искомое значение целевой функцииpa~HO4 Х,+ 3;:=26000:
10.4. Двойственная задача линейного
программирования
Структура и свойства двойственной задачи. Почти всякую злп
можно рассматривать как экономическую задачу о распределении ре
сурсов Ь" Ь2,••• , Ьm между различными потребителями, например, меж-
ду некоторыми технологическими процессами А"А2,••• ,А•. Любое до
пустимое решение ЗЛП Хl' Х2,.•• , Х. дает конкретное распределение,
указывающее ту долю каждого из ресурсов, которая должна быть ис
пользована при осуществлении соответствующего технологического
процесса.
Рассмотрим пример. Завод производит три вида продукции Х" Х2, ХЗ' каждый из которых требует затрат времени на обработку на токар
ном, фрезерном и сверлильном станках. Количество машинного времени
для каждого из станков ограниченно. Пусть С" С2' СЗ- прибьmь от реа лизации единицы соответствующего вида продукции. Требуется опре делить, какое количество каждого вида продукции необходимо произ водить в течение заданного интервала времени, чтобы получить мак симальную прибыль.
Формально задача записывается так: найти
max (с,х, +С2Х2 +СЗХЗ)
х1 ,х2,хз
при ограничениях
|
|
|
allX, +а'2Х2 |
+а13хз ~b,; |
|
|
{ |
а2,Х, +а22Х2 +а23хз ~b2; |
|
|
|
аз,Х, +аЗ2Х2 |
+аззхз 5,Ьз, |
|
|
|
|
||
где а , а |
., |
аз - время, необходимое для обработки единицыj-го вида |
||
'} |
2~ |
~ |
|
|
продукции соответственно на токарном, фрезерном и сверлильном стан-
ках (j = 1,2,3); ы' Ь2, Ьз - ресурс машинного времени соответственно
для токарного, фрезерного и сверлильного станков. Сформулированная задача является прямой злп.
Рассмотрим далее задачу в несколько иной постановке. Обозначим
через И" И2' ИЗ цену единицы времени работы на токарном, фрезер
ном и сверлильном станках соответственно, тогда а,\ И,+а2, И2+аз, ИЗ
можно трактовать как расходы на изготовление единицы продукции
первого вида, а'2И,+а22И2+аЗ2ИЗ - расходы на изготовление единицы продукции второго вида, а\зИ\+а2зИ2+аззИЗ - расходы на изготовление
единицы продукции третьего вида.
318
319
;1
"1
ДЛЯ величин расходов Выполняются следующие соотношения:
ани\ +а2\И2 +аз\Из ~C\; |
|
{а\2Х\ +а22И2 +аз2Из ~C2; |
(10.7) |
а\3И\ + а23И2 +аззхз ~ Сз'
Учитывая, что Ь\, Ь2, Ьз - использованный ресурс машинного вре
мени для каждого из станков, тоща Ь\И\+Ь2И2+ЬзИз - суммарные рас
ходы на производство.
Требуется найтитакие И\, И2, ИЗ' удовлетворяющиеусловиям(10.7),
при которых минимизируются суммарные расходы на производство.
Таким образом, целевую функцию можно записать в виде
min g(И)=ЬР\+ЬР2+ЬЗИЗ' |
(10.8) |
и"и,.и, |
|
причем И\, И2, Из~ О.
Задачу (10.8) с ограничениями (10.7) называют двойственной зада
чей по отношению к прямой, сформулированной ранее.
~оотно~ение прямой и двойственной задач. Между прямой и
двоиственнои задачами имеет место взаимно однозначное отношение.
Имея прямую задачу, всеща можно перейти к двойственной и наобо
рот. Данное отношение находит выражение в виде следующих правил:
1) если прямая за~ача является задачей максимизации, то двой
ственная будет задачеи минимизации и наоборот;
2)коэффициенты целевой функции прямой задачи С\, С2,••• , с стано
вятся свободными членами ограничений двойственной задачи;n
3)свободные члены ограничений прямой задачи Ь\, Ь2,••• , Ь стано
вятся коэффициентами целевой функции двойственной задачи;т
4)матрицуограничений двойственной задачи получаюттранспони
рованием матрицы ограничений прямой задачи;
5)знаки неравенств в ограничениях изменяются на обратные'
6)чи:лоограничений прямой задачиравночислупеременных~ой
ственнои задачи, а число ограничений двойственной задачи равно чис
лу переменных прямой задачи.
Переменные Ир И2,·•• , Иm двойственной задачи называют «тене
выми ценами». Двойс~венную задачу выгоднее решать, чем исходную
прямую, если в ПРЯМОИ задаче при маломколичестве переменных (т > n)
имеется большое количество ограничений.
Запишем обе задачи в матричном виде.
Прямая задача. Найти тахЛХ) = тахСТ Х при АХ ~ Ао; Х ~ О.
Двойственная задача. Найти miпg(й) = А;Й при АТО ~ С; й ~ О.
320
Связь между оптимальными решениями прямой и двойственной
,задач устанавливается посредством следующих теорем.
|
Теорема 1. Если Хо и (jо - допустимые решения прямой и двой |
||||
|
ственной задач, Т.е. если АХ ~ Ао и АТО ~ С ,то С |
Т |
ХО ~ А;Йо' т.е. зна |
||
|
|
||||
|
чения целевой функции прямой задачи никоща не превышают значений |
||||
1 ' |
целевой функции двойственной задачи. |
|
|
||
|
Теорема 2. Если Хо и йо - допустимые решения прямой и двой |
||||
|
ственной задач и если С |
Т |
ХО =(j тАо ,то Хо И йо - |
оптимальные реше |
|
|
|
||||
|
ния этих задач. |
|
|
|
|
|
Таким образом, получено, что если прямая задача есть задача мак |
||||
|
симизации, то двойственная задача- задача минимизации. Остановимся |
||||
|
на особенностях решения задач минимизации. Первое правило гласит, |
||||
|
что в задачах минимизации направляющий столбец определяют по наи |
||||
|
большему положительному элементу индексной строки. Правило оста |
||||
|
новки для задачи минимизации формулируется так: все элементыI ин |
||||
|
дексной строки должны быть неположительными, Т.е. аО}~ О. И, нако |
||||
|
нец, главная сложность, возникающая при решении задач минимизации, |
||||
|
- это выбор первоначального базиса. Дело в том, что при решении за |
||||
|
дач минимизации область допустимых значений ограничивается снизу, |
||||
|
Т.е. ограничения имеют вид АТй ~ С; й ~ о . При приведении системы |
||||
|
ограничений к каноническому виду дополнительные переменные вво |
||||
|
дятся в модель с отрицательными знаками. По этой причине они не могут |
||||
|
быть введены в базис. Отметим также, что в общем случае постанов |
||||
|
ки задач линейного программирования допускают в ограничениях зна- |
||||
|
ки неравенств как «больше или равно», так и «меньше или равно». Не |
||||
|
равенства, в которых имеет место знак «меньше или равно», приводят |
||||
|
ся к каноническому виду путем добавления в первоначальный базис |
||||
|
дополнительной переменной, как это было продемонстрировано при ре |
||||
|
шении задачи максимизации симплекс-методом. для неравенств, име |
||||
|
ющих знак «больше или равно», дополнительная переменная вводится |
||||
|
с отрицательным знаком, и в базис введена быть не может. По этой |
||||
|
причине определение начального допустимого базиса в общем случае |
||||
|
представляет значительные трудности. для нахождения допустимых |
||||
|
базисных решений разработаны специальные методы. Рассмотрим один |
||||
|
из НИХ. |
|
|
|
|
2\-4З55 |
321 |