

Типовые алгоритмы регулирования, типовые регуляторы и их динамические характеристики.
Основными функциями типового регулятора являются усилениесигнала рассогласования и формирование корректирующих сигналов от ошибки, ее производной и интеграла ошибки. Различают несколько разновидностей регуляторов в зависимости от алгоритма формирования корректирующего сигнала: пропорциональный (П-регулятор), интегральный (И-регулятор), пропорционально-интегральный (ПИ-регулятор), пропорционально-дифференциальный (ПД-регулятор), пропорционально-интегрально-дифференциальный (ПИД-регулятор).
Опишем характеристики и параметры настройки типовых регуляторов.
• П-регулятор имеет статическую линейную характеристику, печаточная функция его равна кр. П-регулятор безынерционно реагирует на ступенчатое воздействие.
• И-регуляторимеет передаточную функцию вида
![]()
гдеТ — постоянная времени интегрирования. На входной единичный ступенчатый сигнал И-регулятор реагирует линейным сигналом, причем за время Т выходной сигнал достигает единицы.
• ПИ-регулятор имеет двухпараметрическую передаточную функцию вида
![]()
где кр, Ти — коэффициент передачи и время изодромасоответственно. ПИ-регулятор является астатическим регулятором, он совмещает в себе свойства П- и И-регуляторов, его реакция на единичное воздействие представляется мгновенным скачком величины кри последующим линейно растущим сигналом с наклоном Ти/кр.
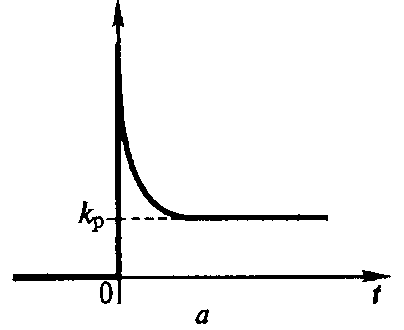
• ПД-регулятор имеет передаточную функцию вида
![]()
где к , Т — коэффициент передачи и время упреждения соответственно, ПД-регулятор в стационарном режиме ведет себя как пропорциональное звено, но при изменении входного сигнала вырабатывает дополнительную составляющую, соответствующую производной от входного сигнала. Переходная функция регулятора приведена на рис. 5.3, а.
![]()
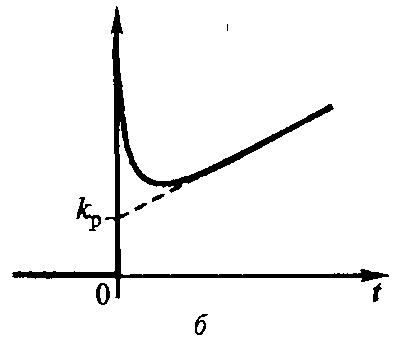
• ПИД-регулятор имеет трехпараметри-ческую передаточную функцию вида
![]()
где кр, Г, ТИ — коэффициент передачи, время упреждения и время изодромасоответственно. Структурная модель ПИД-регулятора может быть представлена и в мультипликативной форме
![]()
Переходная функция регулятора приведена на рис. 5.3, б. Логарифмическая амплитудная частотная характеристика ПИД-регулятора имеет симметричный вид относительно своей среднечастотной части, наклон в низкочастотной части составляет —20 дБ/дек и 20 дБ/дек в высокочастотной части характеристики, средние частоты подавляются.
Структурная схема унифицированного регулятора сцар.
Реализация систем регулирования технологическими параметрами в соответствии с данной структурной схемой обеспечивает регулирование «до себя» и «после себя» для статических и астатических объектов регулирования по П-. ПИ-. ПИД- законам управления с учетом охвата исполнительного механизма отрицательной обратной связью.
Структурная схема регуляторов, реализуемых с помощью системы автоматического регулирования турбинного отделения, приведена на структурной схеме, приведенной на рисунке.Схема является унифицированной для всех систем цифрового авторегулирования.
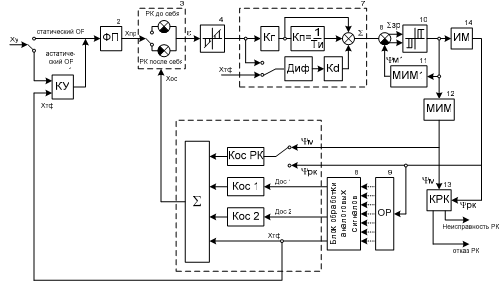
Рис. 3.4.1 – Структурная схема регулятора
На структурной схеме обозначены:
1 - корректор уставки (КУ);
2 - формирователь программы (ФП);
3, 8 - формирователи рассогласования;
4 - формирователь зоны нечувствительности;
5 - формирователь обратной связи;
6 - блок обработки аналоговых сигналов;
7 - формирователь закона регулирования;
9 - объект регулирования;
10 - релейный элемент;
11, 12 - модели исполнительного механизма;
13 - блок контроля регулирующего клапана;
14 - исполнительный механизм
Корректор уставки (1) входит в состав регулятора, воздействующего на
астатический объект, и обеспечивает автоматическую компенсацию статической ошибки регулирования.
Формирователь программы (2) обеспечивает безударное включение
регулятора и осуществляет изменение программного значения до уровня уставки.
В зависимости от способа регулирования («до себя» или «после себя») в блоке (3)
определяется рассогласование между программным значением Хпр и величиной обратной связи регулятора Хос. Положительное рассогласование вызывает формирование положительной П – части, увеличение интегральной составляющей и выдачу команд на открытие регулирующего клапана.
Отрицательное рассогласование вызывает формирование отрицательной П –
части, уменьшение интегральной составляющей и формирование команд на
закрытие регулирующего клапана.
Формирователь зоны нечувствительности (4) блокирует выдачу команд
управления на регулирующий орган при величине рассогласования, не
превышающей величины зоны возврата.
Формирователь обратной связи (5) в зависимости от типа объекта
регулирования обеспечивает формирование сложной обратной связи,
учитывающей величину регулируемого параметра, положение регулирующего
клапана и корректирующие параметры, что дает возможность построить
одноимпульсную, двухимпульсную и трехимпульсную схемы регулирования.
Наличие составляющих в обратной связи определяется ненулевыми
значениями коэффициентов при том или ином параметре, входящим в обратную
связь.
Для астатических объектов с целью повышения устойчивости работы
регулятора в обратную связь вводится сигнал от датчика положения
регулирующего клапана, который в случае его неисправности автоматически
безударно заменяется моделируемым системой значением положения клапана.
Сигналы, поступающие от объекта регулирования (9) и обеспечивающие
формирование обратной связи, могут проходить через блок обработки аналоговых
сигналов (6), обеспечивающий их дополнительную фильтрацию.
Формирователь (7) обеспечивает формирование суммарного управляющего воздействия в соответствии с П-, ПИ-, ПИД- законами регулирования. Выбор закона регулирования осуществляется путем задания ненулевого коэффициентов при той или иной его составляющей. Причем дифференциальная составляющая может формироваться либо по текущему значению регулируемого параметра, либо по величине рассогласования.
Формирователь рассогласования (8), релейный элемент (10), а также модель
исполнительного механизма (11) осуществляют преобразование суммарного управляющего воздействия в импульсную последовательность, поступающую на
исполнительный механизм (14).
Модели исполнительного механизма (11 и 12) представляют собой
интегральные звенья, на входы которых поступают те же управляющие сигналы,
что и на исполнительный механизм (14). Изменение положения моделей
производится с постоянной скоростью, равной скорости перемещения реального
клапана при наличии команд на его открытие или закрытие. Кроме того, модели
ψм1 и ψм исполнительного механизма (14) учитывают его люфты, возникающие при смене направления выдачи команд.
Модель (11) исполнительного механизма, как указывалось выше, входит в узел формирования серии импульсов на исполнительный механизм (14) и
обеспечивает при нулевом рассогласовании компенсацию интегральной
составляющей закона регулирования. Диапазон изменения выходного сигнала ψм1
модели (11) - отминус 90 до 90 %. При включении регулятора с целью
обеспечения безударности модели (11) и интегральной составляющей закона
регулирования присваивается нулевое значение.
Модель (12) позволяет обеспечить контроль работоспособности
регулирующего клапана путем сравнения сигналов от реального датчика
положения клапана и модели.
Диапазон изменения выходного сигнала ψм модели (12) от 0 до 100 %. При
включении регулятора модели (12) присваивается значение положения
регулирующего клапана.
Блок контроля (13) осуществляет контроль исправности регулирующего
клапана путем сравнения моделируемого положения ψм и показаний реального датчика положения ψРК, а также анализа сигналов от концевых выключателей.
Сигнал «Неисправность РК» формируется в следующих случаях:
1) при расхождении показаний ψм и ψРК на величину больше допустимой;
2) при несоответствии сигналов от концевых выключателей и ψРК;
3) при скачкообразном изменении ψРК на величину больше допустимой.
При отсутствии сигналов от концевых выключателей формируется сигнал
«Отказ РК» (отсутствие питания регулирующего клапана).