

Управление исполнительными механизмами и регуляторами с арм. Типы рабочих окон управления исполни тельными механизмами.
Управление исполнительными механизмами и регуляторами осуществляется с АРМ операторов с использованием средств оконной графики или с помощью сенсорных экранов.
Предусматриваются следующие типы рабочих окон управления исполни тельными механизмами:
-управление электродвигателем;
-управление электроприводом арматуры;
-управление автоматическим включением резерва;
-управление автоматическим регулятором;
-задание уставок регулирования.
Окна управления исполнительными механизмами содержат изображение пиктограммы механизма, элементы управления механизмом, а также дополнительные элементы, например, гистограммы, цифровые индикаторы и текст (рис. 8.7)
Окно управления вызывается щелчком при установке курсора на пиктограмму механизма на видеокадре.
Предусматриваются также следующие типы окон индикации:
-окно индикации детальной информации о значении аналогового параметра, формируемого измерительным контуром, уставках, предусмотренных для данного параметра и состоянии измерительного контура;
-окно индикации детальной информации о дискретных данных и состоянии каналов ввода дискретных данных.
Доступ к видеокадрам . Отдельные видеокадры могут быть выбраны оператором следующими способами:
-вызов ниспадающего меню, позволяющий путем движения от верхнего уровня иерархии -видеокадров к нижнему выбрать необходимый видеокадр;
-прямой переход с помощью пиктограмм из обобщенного видеокадра к видеокадру следующего уровня иерархии;
-выбор в особом видеокадре с помощью пиктограмм группы видеокадров, которые вместе образовывают полный набор информации для необходимой "информационной" цели;
запрос последнего видеокадра на экране;
-выбор "связанного видеокадра" для только что отображенного видеокадра функционально-технологической группы при реализации заданной функции технологического процесса.
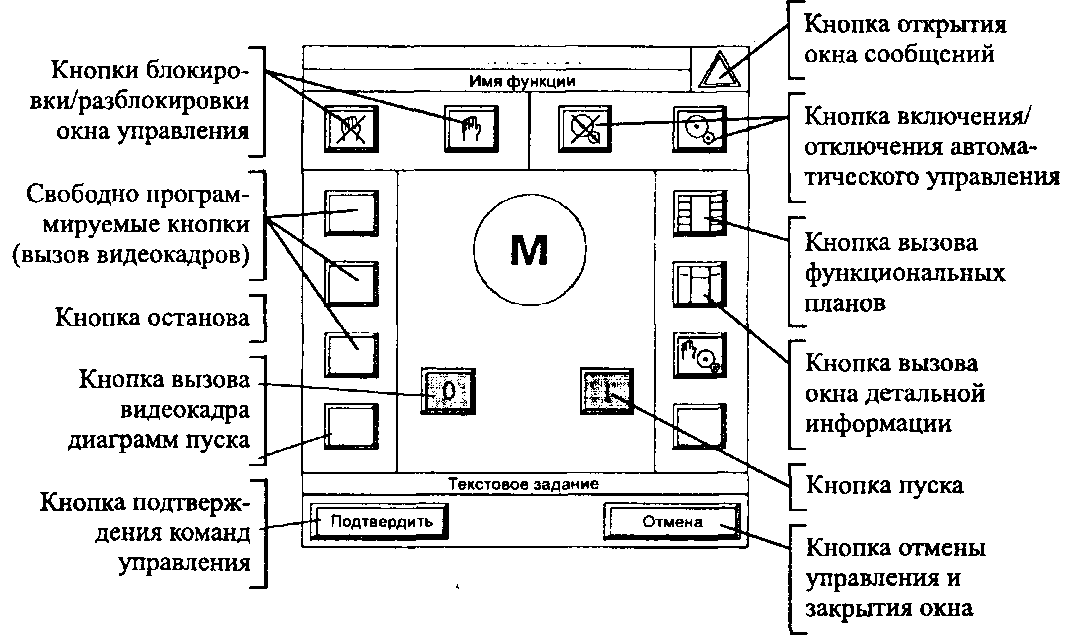
Рис. 8.7. Окно управления механизмом
Дополнительные вопросы
Задачи статического и динамического анализа сау.
Анализ работы системы автоматического регулирования и анализ работы ее элементов выполняется для двух возможных состояний: статического и динамического.
Уравнение статики элемента устанавливает зависимость выходной координаты от входных координат, представляющих собой внешние по отношению к элементу возмущения. Уравнение статики позволяет определить связь между выходной координатой и конкретным внешним возмущением при различных равновесных режимах работы.
При статическом анализе системы автоматического регулирования изучают условия обеспечения равновесных (установившихся) состояний, а также выявляют статическую характеристику. Такой анализ позволяет оценить статическую ошибку в поддержании заданного значения регулируемого параметра (степень неравномерности). Выполнение условий работы системы по заданной степени неравномерности и выбору диапазона регулируемых режимов проверяется статическим расчетом. При известном регулируемом объекте статический расчет сопровождается определением параметров элементов автоматического регулятора, которые определяют его конструктивные показатели, обеспечивающие заданную неравномерность и диапазон работы.
Динамический анализ системы автоматического регулирования связан с исследованием ее поведения при нарушении равновесного режима. Предметом исследования в этом случае является процесс изменения регулируемого параметра во времени — так называемый переходный процесс cp = cp(t); X = X (t) или т) = ц (t). Нарушение равновесного режима может сопровождаться возвращением системы в исходное состояние, переходом ее в новое равновесное состояние, характеризуемое новым значением регулируемого параметра (в статических системах), или непрерывным удалением от первоначального состояния. В первом и втором случаях система является устойчивой, в третьем — неустойчивой. Поэтому первой задачей динамического анализа работы систем автоматического регулирования является оценка системы с точки зрения устойчивости. Вторая задача динамического анализа связана с выявлением качественных показателей переходного процесса (время переходного процесса, максимальное отклонение регулируемой величины от заданного значения, колебательность процесса и т. п.). Третьей задачей анализа является определение влияния параметров элементов, образующих систему автоматического регулирования, на устойчивость и на качественные показатели переходного процесса.
Уравнения движения элементов системы автоматического регулирования, базирующиеся на основе тех же зависимостей (4)—(6), являются линейными дифференциальными уравнениями. Линеаризация связей в элементах системы, обеспечивающая получение линейных дифференциальных уравнений собственно системы, — это основной метод, упрощающий в допустимых пределах решение задач устойчивости и качества переходных процессов.
Нахождение дифференциальных уравнений элементов является основой для получения дифференциального уравнения системы автоматического регулирования. Решение дифференциального уравнения системы регулирования позволяет найти изменение регулируемой величины во времени, т. е. переходный процесс. Знание переходного процесса дает наиболее полное представление о работе системы автоматического регулирования.
Дифференциальные уравнения движения элементов и систем автоматического регулирования записываются в форме, при которой левая часть уравнения содержит выходную величину и ее производные, а правая часть — соответствующие входные возмущения.