

4.1.2 Уравнения систем с нелинейностью в виде сухого трения и зазора
Приведем примеры составления уравнений для нелинейных систем с сухим трением или зазором в механической передаче.
Следящая система с
линейным и сухим трением. В§
5.7составлены уравнения следящей
системы в линейном виде. Рассмотрим
теперь такой случай, когда к линейному
моменту трения![]() добавляется еще момент сухого трения
добавляется еще момент сухого трения![]() ,
имеющий постоянную величину, равную
некоторому значениюс, и меняющий
свое направление (знак) с изменением
знака скорости вращения объектар(рис. 16.19).
Следовательно, теперь уравнение
управляемого объекта примет вид
,
имеющий постоянную величину, равную
некоторому значениюс, и меняющий
свое направление (знак) с изменением
знака скорости вращения объектар(рис. 16.19).
Следовательно, теперь уравнение
управляемого объекта примет вид
![]() ,
,![]() ,
,![]() , (4.48)
, (4.48)
где – угол поворота вала управляемого объекта, причем
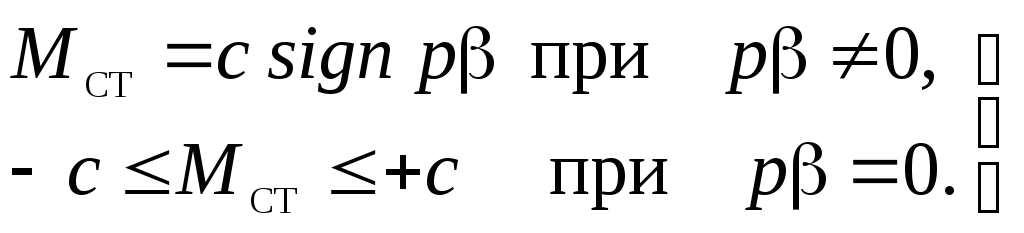 (4.49)
(4.49)
Важная особенность
сухого трения состоит в том, что это (в
отличие от релейных характеристик)
далеко не всегда означает мгновенное
переключение величины
![]() при
при![]() .
Здесь возможны два варианта:
.
Здесь возможны два варианта:
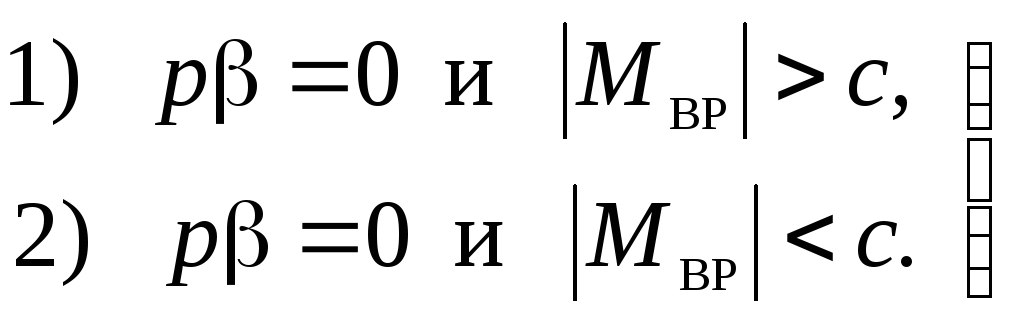 (4.50)
(4.50)
В
первом случае скорость объекта
![]() пройдет через нулевое значение, и его
движение будет продолжаться без остановки
дальше по закону (4.48). Во втором же случае
произойдет остановка управляемого
объекта, в течение которой будет иметь
место не переключение, а медленное
изменение величины
пройдет через нулевое значение, и его
движение будет продолжаться без остановки
дальше по закону (4.48). Во втором же случае
произойдет остановка управляемого
объекта, в течение которой будет иметь
место не переключение, а медленное
изменение величины![]() в интервале от
в интервале от![]() (или обратно)
(или обратно)![]() будет принимать все время определенные
значения
будет принимать все время определенные
значения
![]()
![]() . (4.51)
. (4.51)
В
этом случае движение возобновиться
снова только тогда, когда вращающий
момент достигнет значения
![]() и превысит его.
и превысит его.
Если
же остается
![]() ,
то система будет неподвижна. Поэтому
положение равновесия управляемого
объекта оказывается неопределенным
внутри некоторого отрезка, а именно,
при любом значении
,
то система будет неподвижна. Поэтому
положение равновесия управляемого
объекта оказывается неопределенным
внутри некоторого отрезка, а именно,
при любом значении![]() .
Этим определяется зона застоя системы.
Застой проявляется в том, что, с одной
стороны, система не будет двигаться при
изменении угла задатчика в определенном
интервале и, с другой стороны, что система
будет обладать ошибкой из-за сухого
трения в положении равновесия. В процессе
же движения системы в одну сторону с
любой скоростью сухое трение внесет
постоянную ошибку одного знака, что
соответствует как бы дополнительной
внешней нагрузке
.
Этим определяется зона застоя системы.
Застой проявляется в том, что, с одной
стороны, система не будет двигаться при
изменении угла задатчика в определенном
интервале и, с другой стороны, что система
будет обладать ошибкой из-за сухого
трения в положении равновесия. В процессе
же движения системы в одну сторону с
любой скоростью сухое трение внесет
постоянную ошибку одного знака, что
соответствует как бы дополнительной
внешней нагрузке![]() .
.
Итак, уравнение управляемого объекта, как нелинейного звена системы, согласно (4.48) и (4.49) с учетом (4.50) будет иметь вид
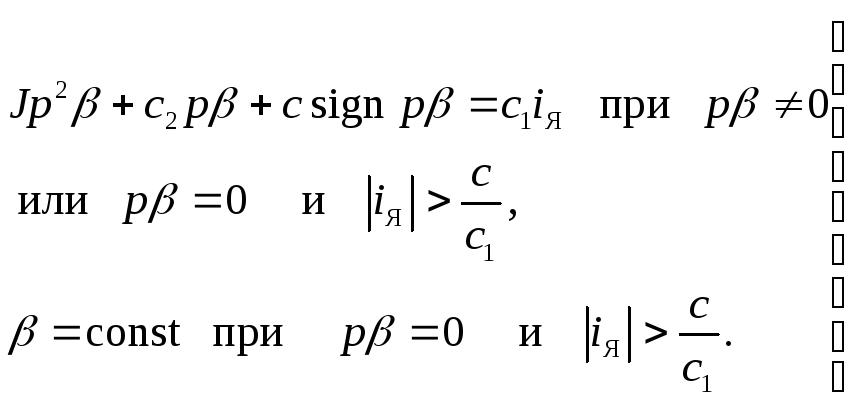 (4.52)
(4.52)
Уравнения всех остальных звеньев данной следящей системы в совокупности образуют линейную часть системы, единое уравнение которой для свободного движения упрощенно запишем в виде
![]() (4.53)
(4.53)
Следящая
система с зазором. Предположим
теперь, что в той же самой следящей
системе нелинейность заключается не в
сухом трении, а в наличии зазоров в
силовой механической передаче между
двигателем и управляемым объектом. Все
эти зазоры объединим в один и изобразим
его условно в виде вилки со свободным
входом
![]() .
Таким образом, между двигателем и
управляемым объектом вклинивается
теперь новое нелинейное звено, изображенное
нарис.
16.20, а,
входную величину которого обозначим
через
.
Таким образом, между двигателем и
управляемым объектом вклинивается
теперь новое нелинейное звено, изображенное
нарис.
16.20, а,
входную величину которого обозначим
через
![]() .
.
Характеристика
этого нелинейного звена изображена на
рис.
16.20, б.
смысл ее следующий. Если бы не было
зазора, то
![]() равнялось бы
равнялось бы![]() ,
и характеристикой была бы прямая под
углом 45,
изображенная на рис.
16.20, б
штрих-пунктиром. Вследствие зазора при
движении в сторону возрастания угла
,
и характеристикой была бы прямая под
углом 45,
изображенная на рис.
16.20, б
штрих-пунктиром. Вследствие зазора при
движении в сторону возрастания угла
![]() эта прямая сдвинется вправо на величину
эта прямая сдвинется вправо на величину![]() (поводок прижмется к правой стороне
вилки). При изменении направления
движения сначала поводок будет
перемещаться внутри зазора, не двигая
вилку (
(поводок прижмется к правой стороне
вилки). При изменении направления
движения сначала поводок будет
перемещаться внутри зазора, не двигая
вилку (![]() ).
На характеристике это соответствует
горизонтальному отрезку длиной
).
На характеристике это соответствует
горизонтальному отрезку длиной![]() (AB
или EF
или KL
или другие, в зависимости от фактического
значения
(AB
или EF
или KL
или другие, в зависимости от фактического
значения
![]() в это время). Затем начнет двигаться и
вилка, что будет соответствовать прямойBC,
сдвинутой влево от начала координат на
величину
в это время). Затем начнет двигаться и
вилка, что будет соответствовать прямойBC,
сдвинутой влево от начала координат на
величину
![]() .
.
При
равновесии системы поводок и вилка
могут занимать любое относительное
положение внутри зазора, что вызывает
ошибку системы из-за зазора, равную
![]() .
При движении системы в одну из сторон
будет постоянное отставание объекта
из-за зазора на величину
.
При движении системы в одну из сторон
будет постоянное отставание объекта
из-за зазора на величину![]() ,
не считая того отставания, которое будет
еще из-за нагрузки.
,
не считая того отставания, которое будет
еще из-за нагрузки.
Уравнение управляемого объекта, включающего в себя и двигатель, теперь разобьется на два нелинейных. Первое нелинейное уравнение управляемого объекта с двигателем будет (ограничимся учетом одной постоянной времени)
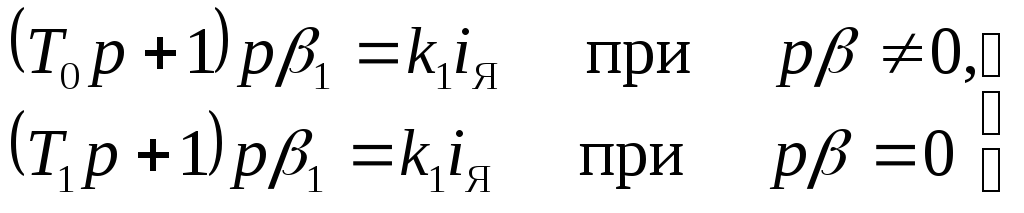 (4.54)
(4.54)
(соответственно
с поводком, прижатым к вилке, и с поводком,
свободно двигающимся внутри зазора);
![]() меньше
меньше![]() на величину
на величину![]() ,
где
,
где![]() – момент инерции управляемого объекта.
Кроме этого, надо написать второе
уравнение нелинейного звена с зазором,
соответствующее характеристикерис.
16.20, б:
– момент инерции управляемого объекта.
Кроме этого, надо написать второе
уравнение нелинейного звена с зазором,
соответствующее характеристикерис.
16.20, б:
 (4.55)
(4.55)
Следовательно, управляемый объект будет иметь остановки при своих колебаниях, соответствующие участкам АВ, CD и т. д. характеристики рис. 16.20, б.
Линейная часть системы остается такой же, как в предыдущем примере, т. е. (4.53).
Система автоматического регулирования давления (учет сухого трения). Рассмотрим систему (рис. 14.7), уравнения которой в линейном виде были получены в § 14.2. в чувствительном элементе 2 масса незначительна, но зато существенное значение может иметь сухое трение. Поэтому уравнение движения штока мембраны запишется в виде
![]() , (4.56)
, (4.56)
где ![]() – сила сухого трения, имеющая постоянную
величинус,
меняющая направление при изменении
знака скорости ру
(рис.
16.21, а)
и могущая принимать любые значения во
время остановки, т. е.
– сила сухого трения, имеющая постоянную
величинус,
меняющая направление при изменении
знака скорости ру
(рис.
16.21, а)
и могущая принимать любые значения во
время остановки, т. е.
 (4.57)
(4.57)
Р
– сила давления воздуха камеры на
мембрану;
![]() – упругая сила мембраны;
– упругая сила мембраны;![]() – сила пружины.
– сила пружины.
В результате после перехода к безразмерным относительным отклонениям (14.27) и (14.48), получим вместо (14.47) следующее уравнение чувствительного элемента как нелинейного звена:
 (4.58)
(4.58)
где ![]() ;
;![]() – площадь мембраны;
– площадь мембраны;![]() – номинальное давление в камере.
– номинальное давление в камере.
Построим
характеристику этого нелинейного звена
с сухим трением в координатах
![]() .
Легко видеть, что первое из уравнений
(4.58) соответствует прямымDA
и BC
при
.
Легко видеть, что первое из уравнений
(4.58) соответствует прямымDA
и BC
при
![]() и
и![]() ,
а второе уравнение
,
а второе уравнение![]() – отрезкамАВ,
CD,
EF,
GH
и т. п. на рис.
16.21, б.
Из сравнения рис.
16.21, б
и рис.
16.20, б
видно, что сухое трение в таком нелинейном
звене (без массы) эквивалентно зазору,
половина которого равна
– отрезкамАВ,
CD,
EF,
GH
и т. п. на рис.
16.21, б.
Из сравнения рис.
16.21, б
и рис.
16.20, б
видно, что сухое трение в таком нелинейном
звене (без массы) эквивалентно зазору,
половина которого равна
![]() ,
чего совершенно нельзя сказать о сухом
трении в следящей системе, где учитывалась
масса (момент инерции).
,
чего совершенно нельзя сказать о сухом
трении в следящей системе, где учитывалась
масса (момент инерции).
Все
остальные звенья системы (рис.
14.7) образуют
линейную часть, единое уравнение которой
при
![]() будет
будет
![]() . (4.59)
. (4.59)